自动化专业毕业设计外文翻译基于Ziegler Nichols自整定方法的参数的PLC.docx
《自动化专业毕业设计外文翻译基于Ziegler Nichols自整定方法的参数的PLC.docx》由会员分享,可在线阅读,更多相关《自动化专业毕业设计外文翻译基于Ziegler Nichols自整定方法的参数的PLC.docx(12页珍藏版)》请在冰豆网上搜索。
自动化专业毕业设计外文翻译基于ZieglerNichols自整定方法的参数的PLC
自适应PID控制器
基于ZieglerNichols自整定方法的参数的PLC
摘要
本文介绍一种改进的PID控制器是作为一个动态的系统控制器和必要的步骤,是解释以表达对所提出的PID控制算法是更多的功能比传统的PID控制算法。
在这里齐格勒-尼科尔斯的过程中反应的方法是澄清,以候任自校正,及的优势,自我调整中有详细的解释。
之后,自适应丕三维控制器的算法,给出了使用自整定方法的初始参数。
在这丕三维,比例和积分参数是在控制的自适应算法和衍生产品的参数是一个不断发现,在齐格勒尼科尔斯基于自整定方法。
最后,完整的算法是测试在可编程逻辑控制器,和结果,这项测试是提供和解释。
PID控制器
一比例积分微分控制器或PID控制器是一种常见的用于控制器在工业控制应用。
控制器的比较衡量的过程产值(元Y)与参考设定值()值。
差异或错误信号(e)是处理,然后计算控制信号为操纵的过程中的投入,使系统输出达到所期望的参考价值。
不同于简单的控制算法,PID控制器可以调整的过程中投入的基础上,历史和变化率的错误信号,这使更准确和更稳定的控制。
在这方面的文件,不同结构的PID控制器是使用。
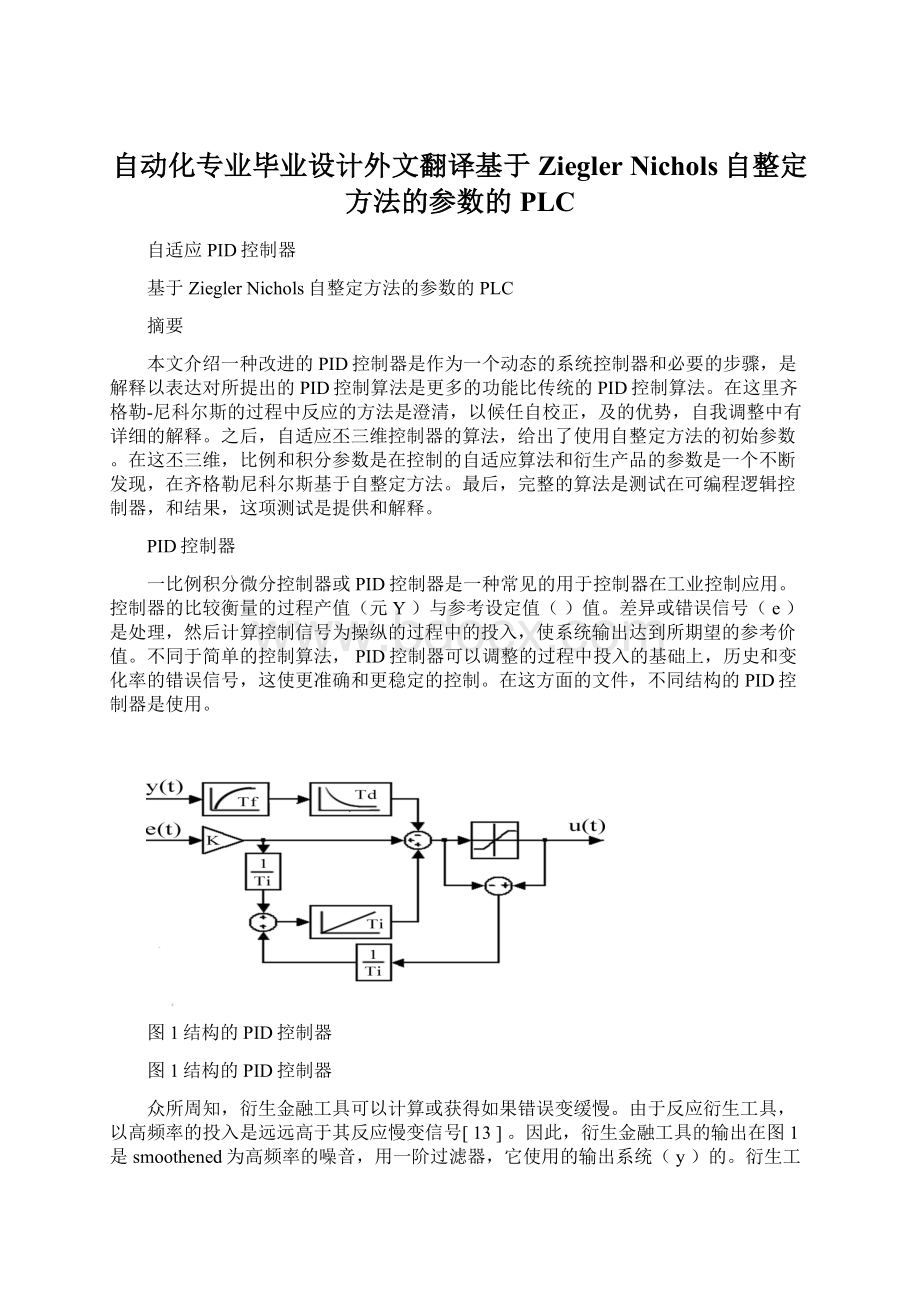
图1结构的PID控制器
图1结构的PID控制器
众所周知,衍生金融工具可以计算或获得如果错误变缓慢。
由于反应衍生工具,以高频率的投入是远远高于其反应慢变信号[13]。
因此,衍生金融工具的输出在图1是smoothened为高频率的噪音,用一阶过滤器,它使用的输出系统(y)的。
衍生工具使用错误的信号可以形成高,衍生金融工具的输出时,误差信号具有较高的高频成分。
因此,在本文件中衍生金融工具的投入使用过滤的输出系统。
在这里,过滤器smoothens信号和抑制高频率的噪音,由于过滤器的时间(TF)的常数(图2)。
在应用,其TF应大于6月24日ts采样周期[6,16]。
图2,稳定系统的输出响应(PLC模拟)
在图1,积分信号是由错误乘以增益(k)和除以积分时间,和饱和度的差异除以积分时间。
PID控制器是一个鲁棒控制器和这个结构提出了一种更强大的控制器。
饱和的组成部分是必要的离散时间控制器[8]。
正如以前说过,这个结构是用来在一个可编程逻辑控制器,这种控制器的最高和最低的边界。
饱和组件的供应没有达成任何的另一点,除限制的最高和最低的边界。
因此,控制信号(u)的是有限的。
齐格勒-尼科尔斯的过程中反应法
过程中反应法是一个实验的开环整定方法,并只适用于开环稳定系统。
此方法由齐格勒和尼科尔斯是基于过程的信息的形式,开环阶跃响应得到了来自撞测试。
这个方法可以被看作是传统方法的基础上的建模与控制。
该齐格勒-尼科尔斯调整规则,发达国家给予闭环系统具有良好的衰减负载扰动。
设计标准是四分之一振幅衰减的比例,这意味着振幅一振荡应减少的一个因素4超过整个时期。
这相当于闭环极点与相对阻尼约二,这是太小[1]
图3
计算PID参数使用齐格勒-尼科尔斯的过程中反应法
这种方法的特点首先是核电厂的两个参数nmax和L为一阶和二阶死亡时间系统,然后计算PID参数(4)。
这里n是最高点,最高坡度和L是死时间。
(4)
首先的一个步骤信号是适用的制度和程序启动搜索死区时间。
死区时间是的时候,系统没有反应的参考信号。
在计划,宽容是由于测量死区时间(图4),因为总有那么一些高频率的测量噪音,在系统输出。
作为如图4所示,这些信号和分布的变化,在一区间的定义容忍。
之后,动力系统开始跟进参考,并达致以外的容忍边界,死时间的计算方式是PLC程序。
图4容忍极限
如果死区时间是成品或计算,该程序将启动搜索最高的斜坡。
它收集所有斜坡及后加以搜集,选择最大的斜坡。
每一个斜坡计算方程(5)。
(5)
它memorizes产值前一段时间,并采取了产值近一段时期,并划分为他们的差异,采样周期[3,5]。
接着该程式构成的数据,所有的斜坡,并选择最大的斜坡。
当最大坡度的计算方法,程序等待稳定状态,因为参数的系统是稳定的在稳定状态。
最后,程序会计算PID参数。
概括起来,计算PID参数使用齐格勒-尼科尔斯prm;第一所收集的资料,从开环植物响应单位阶跃输入,然后检查数据集,以找到最高的斜坡(图3)后,然后确定参数所需的齐格勒尼科尔斯prm,最后,使用调谐关系产生的PID常数。
鲁棒性齐格勒-尼科尔斯方法
一个良好的PID控制器的设计应表现出的鲁棒性方面的小扰动,在控制器的系数。
因此,一系列的价值观,确保鲁棒性是确定的齐格勒-尼科尔斯prm在(6),是系统的时间常数(无控制器)为一阶死系统(fods),是解决时间(不包括控制器)二阶死亡时间系统(sods)[3]。
(6)
图5的仿真结果fodss向阶跃响应
(7)
可以看出,在方程组(7)和图5,系统是一个更强大的系统比和系统,由于比例。
当比率增加,从系统的沉降时间减少,当比率下降,从系统,使超像一个二阶系统,当比例大约是零,系统,使振荡[2]。
在方程组(8)和图6,系统是一个更强大的系统比和系统,由于比例。
作为相似的,以图6,系统具有良好的表现,由于比例是大约。
图6的仿真结果sodss向阶跃响应
(8)
从数字六日及七日,齐格勒-尼科尔斯的过程中反应法(prm)始终提供了一个负责任的比例增益为PID控制器。
该方法不仅给表现良好,但也具有较强的鲁棒性方面的控制器参数摄动[11]。
自校正使用齐格勒尼科尔斯的过程中反应法
PID参数必须有决心,从动态系统。
正如以前说过,系统参数变化的影响,因为种种原因。
如果PID控制器参数保持不变,相当长的时间,动力系统无法控制的PID控制有效。
根轨迹法,预示着频分析方法和一些方法,这样可用于这一计算的。
但这些方法有复杂的数学计算,也系统和反馈系统的disturbations不能衡量一时没有任何错误。
此外,系统参数(如系统增益)的变化,由于环境的变化。
基于这些原因,自整定PID控制器是必要的,因为这种类型的控制器,可用于不同类型的系统和环境的情况。
此外,自整定PID是一个鲁棒控制器系统的不确定部分。
也为在不断变化的系统动力学控制器采用本身。
因此,使用自整定PID是合理的而不是用任何其他的PID控制器已不断参数[6]。
程序算法的PLC是由于在图8。
该算法连续两个启动选项:
一个是工作与最近的参数计算之前;另一种选择是工作与新参数。
在这个选项中,程序发现新的PID参数的系统。
由于齐格勒-尼科尔斯方法是适用于开环系统,计划首先取消了系统的意见,并等待系统响应的解决。
当系统的输出是复位,程序记录系统的瞬时输入,然后程序适用的一个步骤信号系统的投入。
应该说,这一步的信号是,至少有10%大于系统的电流输入(参考)价值[11]。
如果阶跃信号小于10%,系统参数无法确定合理的。
之后,运用阶跃信号,程序等待,直到系统输出,收于产值。
当系统的输出是稳定的,程序会计算PID参数使用齐格勒-尼科尔斯的过程中反应的方法和他们传送至PID参数输入。
当PID参数加载,程序的重视,系统反馈和PID控制器。
因此,系统开始工作,与PID控制器。
澄清,必要的步骤,给出了在一个序列如下:
-运行系统在开环模式
-等到系统输出成为稳定
-记录系统的输入和输出
-适用的一个步骤输入系统(大于10%,最近输入)
-等到系统输出成为稳定
-计算PID参数和工作与PID控制器。
自适应控制
在日常用语,“适应”是指改变一个行为,以符合新的情况。
直观,一自适应控制器是一个控制器,可以修改其行为的反应的变化的动态过程和性质的骚乱。
在第3条中,齐格勒尼科尔斯的过程中反应的方法了三个不断参数PID控制器;陈家强,钛和TD。
不过,有些系统的反应,可不可预知的,而这些PID参数不能有效地工作。
此外,自适应控制可以帮助同时提供稳定和良好的回应。
该办法的变化,控制算法系数的实时性,以补偿的变化,在制度本身。
在一般,控制器,定期监测系统传递函数,然后修改控制算法。
它这样做的同时学习的过程,而控制其行为。
调整的自适应算法向自我调整计划
自我-调整参数,自适应算法和PI三维控制器与对方一样,在图10。
正如以前说过,衍生金融工具的参数,直接去丕三维控制器,增益和积分计算,首先去的自适应算法,然后丕三维控制器。
结论
在这篇文章的自适应丕三维控制器-使用齐格勒尼科尔斯基于自校正方法的参数是介绍及其应用在一个可编程逻辑控制器,给出了。
为此目的,首先,所有在执行的一部分,工业PID控制算法是用于PID控制的衍生金融工具的投入是采取由系统输出和过滤,如此高的频率信号'的影响减至最低。
然后,积分任期是证实获得更多的鲁棒PID的结构和最后输出的PID是有限的,由于临立会的最高和最低范围内。
其次,齐格勒-尼科尔斯的方法,给出了一起鲁棒性的定义,是界定。
可以看出,大部分工业系统在集团这个鲁棒性的限制。
调整的自适应算法,以自整定PID控制器在第4条,鲁棒性限制是增加。
为贯彻落实发展算法1西门子S7-400的CPU412-2DP的PLC的是选定作为一个控制器由于其良好的性能和它的发展结构。
事后发达PLC的算法是模拟的两个二阶系统。
结果表明,自适应丕三维控制器具有良好的表现,一个大型的比例,工业系统。
作为一个结果,在这项工作中,PID的应用程序和系统仿真块,得到了普遍使用在其他的工业体系。
AdaptivePIDController
UsingZieglerNicholsbasedSelf-TuningMethod’sParametersforProgrammableLogicControllers
Abstract
InthispaperamodifiedPIDcontrollerispresentedasadynamicsystemcontrollerandnecessarystepsareexplainedinordertoexpressthepresentedPIDalgorithmismorefunctionalthantheclassicPIDcontrolleralgorithms.HereZiegler-Nicholsprocessreactionmethodisclarifiedtodesignateself-tuning,andadvantagesofself-tuningareexplainedindetail.Afterthat,anadaptivePI-Dcontrolleralgorithmisgivenusingself-tuningmethod’sinitialparameters.InthisPI-D,proportionandintegralparametersareincontroloftheadaptivealgorithmandderivativeparameterisaconstantwhichfoundinZieglerNicholsbasedself-tuningmethod.Finally,thecompletealgorithmistestedintheprogrammablelogiccontroller,andresultsofthistestareofferedandexplained.
PIDController
AProportional-Integral-DerivativecontrollerorPIDcontrollerisacommonusedcontrollerinindustrialcontrolapplications.Thecontrollercomparesthemeasuredprocessoutputvalue(y)withthereferencesetpoint(r)value.Thedifferenceorerrorsignal(e)isthenprocessedtocalculatethecontrolsignalforthemanipulatedprocessinputssothesystemoutputreachesthedesiredreferencevalue.Unlikesimplercontrolalgorithms,thePIDcontrollercanadjustprocessinputsbasedonthehistoryandrateofchangeoftheerrorsignal,whichgivesmoreaccurateandstablecontrol.Inthispaper,adifferentstructureofaPIDcontrollerisused.
Figure1StructureofPIDController
TheStructureofthePIDControllerinFigure1
Asknown,thederivativecanbecomputedorobtainediftheerrorvaryingslowly.Sincetheresponseofthederivativetohigh-frequencyinputsismuchhigherthanitsresponsetoslowlyvaryingsignals[13].SothederivativeoutputinFigure1issmoothenedforhigh-frequencynoisesbyusingfirstorderfilter,anditusesoutputofthesystem(y).Thederivativewhichuseserrorsignalcanformhighderivativeoutputwhentheerrorsignalhashighfrequencycomponents.Thus,inthispaperthederivativeinputusesthefilteredoutputofthesystem.Herethefiltersmoothensthesignalandsuppressesthehigh-frequencynoiseduetofiltertime(Tf)constant(Figure2).Inapplication,theTfshouldbebiggerthanTssamplingperiod[6,16].
Figure2SmoothenofSystemOutputResponse(PLCSimulation)
Infigure1,theintegralsignalisformedbytheerrormultipliedbygain(K)anddividedbyintegraltime,andsaturationdifferencedividedbyintegraltime.PIDcontrollerisarobustcontrollerandthisstructureputsforwardamorerobustcontroller.Thesaturationcomponentisnecessaryfordiscretetimecontrollers[8].Assaidbefore,thisstructureisusedinaprogrammablelogiccontroller,andthiscontrollerhasmaximumandminimumborders.Thesaturationcomponentsuppliesnottoreachanyotherpointexceptthelimitofmaximumandminimumborders.Thus,thecontrolsignal(u)islimited.
Ziegler-NicholsProcessReactionMethod
Processreactionmethodisanexperimentalopen-looptuningmethodandisonlyapplicabletoopen-loopstablesystems.ThismethodpresentedbyZieglerandNicholsisbasedonprocessinformationintheformoftheopenloopstepresponseobtainedfromabumptest.Thismethodcanbeviewedasatraditionalmethodbasedonmodelingandcontrol.TheZiegler-Nicholstuningrulesweredevelopedtogiveclosedloopsystemswithgoodattenuationofloaddisturbances.Thedesigncriterionwasquarteramplitudedecayratio,whichmeansthattheamplitudeofanoscillationshouldbereducedbyafactoroffouroverawholeperiod.Thiscorrespondstoclosedlooppoleswitharelativedampingofabout=02,whichistoosmall[1].
Figure3Ziegler-NicholsPRM
CalculationsofPIDParametersUsingZiegler-NicholsProcessReactionMethod
ThismethodfirstlycharacterizestheplantbytwoparametersNmaxandLforfirstandsecondorderdeadtimesystemsandthencalculatesPIDparameters(4).HereNmaxisthepointofmaximumslopeandListhedeadtime.
(4)
Firstastepsignalisappliedtothesystemandprogramstartstosearchthedeadtime.Thedeadtimeisthetimewhensystemgivesnoresponsetoreferencesignal.Inprogram,atoleranceisgivenformeasuringthedeadtime(Figure4),becausetherearealwayssomehighfrequenciesmeasuringnoisesatsystemoutput.AsshowninFigure4,thesesignalsanddistributionschangeinanintervaldefinedtolerance.Afterthedynamicsystemstartstofollowreferenceandreachesoutsidethetoleranceborder,deadtimeiscalculatedbyPLCprogram.
Figure4ToleranceLimit
Ifthedeadtimeisfinishedorcalculated,theprogramstartstosearchmaximumslope.Itcollectsallslopesandaftercollectingthem,itselectsthebiggestslope.Everyslopeiscalculatedwithequation(5).
(5)
Itmemorizestheoutputvalueofpreviousperiodandtakestheoutputvalueoftherecentperiodanddividestheirdifferencebysamplingperiod[3,5].Thentheprogramconstitutesdataofallslopesandselectsthebiggestslope.Whenthemaximumslopeiscalculated,theprogramwaitssteadystatebecausetheparametersofsystemarestableinsteadystate.Finally,theprogramcalculatesPIDparameters.
Tosumup,tocalculatePIDparametersusingZiegler-NicholsPRM;firstgatherdatafromopen-loopplantresponsetounitstepinput,thenexaminedatasettofindthemaximumslope(Figure3),afterthendeterminetheparametersneededforZieglerNicholsPRM,finally,usetuningrelationstogeneratePIDconstants.
RobustnessofZiegler-NicholsMethod
AgoodPIDcontrollerdesignshouldexhibitrobustnesswithrespecttosmallperturba
 升级会员
升级会员 