自动控制系统的校正.docx
《自动控制系统的校正.docx》由会员分享,可在线阅读,更多相关《自动控制系统的校正.docx(13页珍藏版)》请在冰豆网上搜索。
自动控制系统的校正
第五章自动控制系统的校正
本章要点
在系统性能分析的基础上,主要介绍系统校正的作用和方法,分析串联校正、反馈校正和复合校正对系统动、静态性能的影响。
第一节校正的基本概念
一、校正的概念
当控制系统的稳态、静态性能不能满足实际工程中所要求的性能指标时,首先可以考虑调整系统中可以调整的参数;若通过调整参数仍无法满足要求时,则可以在原有系统中增添一些装置和元件,人为改变系统的结构和性能,使之满足要求的性能指标,我们把这种方法称为校正。
增添的装置和元件称为校正装置和校正元件。
系统中除校正装置以外的部分,组成了系统的不可变部分,我们称为固有部分。
二、校正的方式
根据校正装置在系统中的不同位置,一般可分为串联校正、反馈校正和顺馈补偿校正。
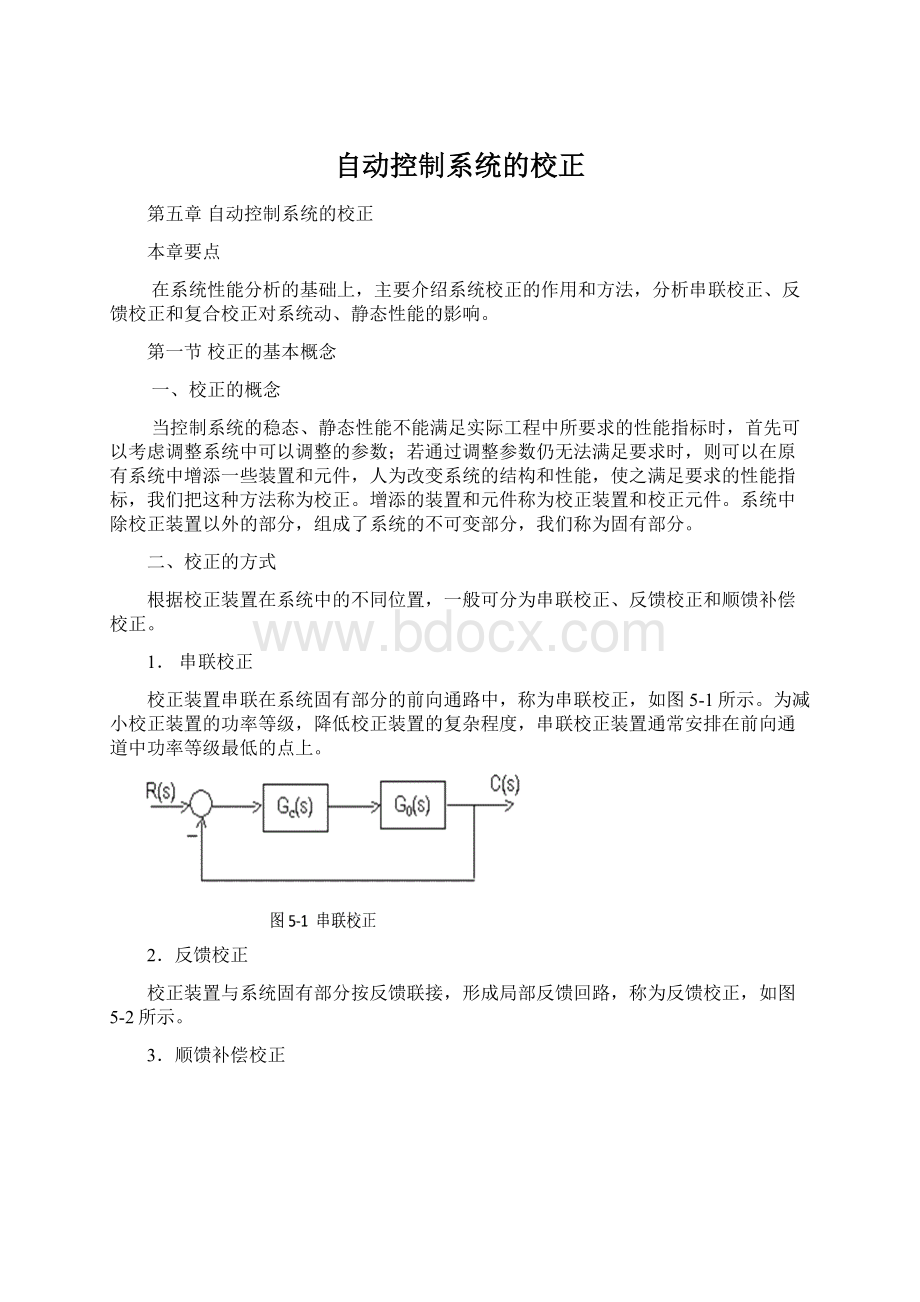
1.串联校正
校正装置串联在系统固有部分的前向通路中,称为串联校正,如图5-1所示。
为减小校正装置的功率等级,降低校正装置的复杂程度,串联校正装置通常安排在前向通道中功率等级最低的点上。
2.反馈校正
校正装置与系统固有部分按反馈联接,形成局部反馈回路,称为反馈校正,如图5-2所示。
3.顺馈补偿校正
顺馈补偿校正是在反馈控制的基础上,引入输入补偿构成的校正方式,可以分为以下两种:
一种是引入给定输入信号补偿,另一种是引入扰动输入信号补偿。
校正装置将直接或间接测出给定输入信号R(s)和扰动输入信号D(s),经过适当变换以后,作为附加校正信号输入系统,使可测扰动对系统的影响得到补偿。
从而控制和抵消扰动对输出的影响,提高系统的控制精度。
三、校正装置
根据校正装置本身是否有电源,可分为无源校正装置和有源校正装置。
1.无源校正装置
无源校正装置通常是由电阻和电容组成的二端口网络,图5-3是几种典型的无源校正装置。
根据它们对频率特性的影响,又分为相位滞后校正、相位超前校正和相位滞后—相位超前校正。
无源校正装置线路简单、组合方便、无需外供电源,但本身没有增益,只有衰减;且输入阻抗低,输出阻抗高,因此在应用时要增设放大器或隔离放大器。
2.有源校正装置
有源校正装置是由运算放大器组成的调节器。
图5-4是几种典型的有源校正装置。
有源校正装置本身有增益,且输入阻抗高,输出阻抗低,所以目前较多采用有源校正装置。
缺点是需另供电源。
第二节串联校正
一、三频段对系统性能的影响
1.低频段的代表参数是斜率和高度,它们反映系统的型别和增益。
表明了系统的稳态精度。
2.中频段是指穿越频率附近的一段区域。
代表参数是斜率、宽度(中频宽)、幅值穿越频率和相位裕量,它们反映系统的最大超调量和调整时间。
表明了系统的相对稳定性和快速性。
3.高频段的代表参数是斜率,反映系统对高频干扰信号的衰减能力。
二、串联校正方法
1.比例微分校正(相位超前校正)
图5-5为一比例微分校正装置,也称为PD调节器,其传递函数为
G(s)=-K(Ts+1)
式中K=R1/R0——比例放大倍数
T=R0C0——微分时间常数
其Bode图如图5-6所示。
从图可见,PD调节器提供了超前相位角,所以PD校正也称为超前校正。
并且PD调节器的对数渐近幅频特性的斜率为+20dB/dec。
因而将它的频率特性和系统固有部分的频率特性相加,比例微分校正的作用主要体现在两方面:
(1)使系统的中、高频段特性上移(PD调节器的对数渐近幅频特性的斜率为+20dB/dec),幅值穿越频率增大,使系统的快速性提高。
(2)PD调节器提供一个正的相位角,使相位裕量增大,改善了系统的相对稳定性。
但是,由于高频段上升,降低了系统的抗干扰能力。
例5-1设图5-7所示系统的开环传递函数为
其中T1=0.2,T2=0.01,K=35,采用PD调节器(K=1,T=0.2s),对系统作串联校正。
试比较系统校正前后的性能。
解:
原系统的Bode图如图5-8中曲线I所示。
特性曲线以-40dB/dec的斜率穿越0dB线,穿越频率ωc=13.5dB,相位裕量γ=12.3o。
采用PD调节器校正,其传递函数Gc(s)=0.2s+1,Bode图为图5-8中的曲线II。
校正后的曲线如图5-8中的曲线III。
由图可见,增加比例积分校正装置后:
(1)低频段,L(ω)的斜率和高度均没变,所以不影响系统的稳态精度。
(2)中频段,L(ω)的斜率由校正前的-40dB/dec变为校正后的-20dB/dec,相位裕量由原来的13.5o提高为70.7 o,提高了系统的相对稳定性;穿越频率ωc由13.2变为35,快速性提高。
(3)高频段,L(ω)的斜率由校正前的-60dB/dec变为校正后的-40dB/dec,系统的抗高
频干扰能力下降。
综上所述,比例微分校正将使系统的稳定性和快速性改善,但是抗高频干扰能力下降。
2.比例积分校正(相位滞后校正)
图5-9为一比例积分校正装置,也称为PI调节器,其传递函数为
式中KC=R1/R0——比例放大倍数
T1=R1C1——积分时间常数
其Bode图如图5-10所示。
从图可见,PI调节器提供了负的相位角,所以PD校正也称为滞后校正。
并且PI调节器的对数渐近幅频特性在低频段的斜率为-20dB/dec。
因而将它的频率特性和系统固有部分的频率特性相加,可以提高系统的型别,即提高系统的稳态精度。
从相频特性中可以看出,PI调节器在低频产生较大的相位滞后,所以PI调节器串入系统时,要注意将PI调节器转折频率放在固有系统转折频率的左边,并且要远一些,这样对系统的稳定性的影响较小。
但是,由于高频段上升,降低了系统的抗干扰能力。
例5-2设图5-11所示系统的固有开环传递函数为
其中T1=0.33,T2=0.036,K1=3.2。
采用PI调节器(K=1.3,T=0.33s),对系统作串联校正。
试比较系统校正前后的性能。
解:
原系统的Bode图如图5-12中曲线I所示。
特性曲线低频段的斜率为0dB,显然是有差系统。
穿越频率ωc=9.5dB,相位裕量γ=88o。
采用PI调节器校正,其传递函数
,Bode图为图5-12中的曲线II。
校正后的曲线如图5-12中的曲线III。
由图可见,增加比例积分校正装置后:
(1)在低频段,L(ω)的斜率由校正前的0dB/dec变为校正后的-20dB/dec,系统由0型变为I型,系统的稳态精度提高。
(2)在中频段,L(ω)的斜率不变,但由于PI调节器提供了负的相位角,相位裕量由原来的88o减小为65 o,降低了系统的相对稳定性;穿越频率ωc有所增大,快速性略有提高。
(3)在高频段,L(ω)的斜率不变,对系统的抗高频干扰能力影响不大。
综上所述,比例积分校正虽然对系统的动态性能有一定的副作用,使系统的相对稳定性变差,但它却能将使系统的稳态误差大大减小,显著改善系统的稳态性能。
而稳态性能是系统在运行中长期起着作用的性能指标,往往是首先要求保证的。
因此,在许多场合,宁愿牺牲一点动态性能指标的要求,而首先保证系统的稳态精度,这就是比例积分校正获得广泛应用的原因。
第三节反馈校正
在主反馈环内,为改善系统性能而加入的反馈称为局部反馈。
反馈校正除了具有串联校正同样的校正效果外,还具有串联校正所不可替代的效果。
一、反馈校正的方式
通常反馈校正可分为硬反馈和软反馈。
硬反馈校正装置的主体是比例环节(可能还含有小惯性环节),Gc(s)=α(常数),它在系统的动态和稳态过程中都起反馈校正作用;软反馈校正装置的主体是微分环节(可能还含有小惯性环节),Gc(s)=αs,它只在系统的动态过程中起反馈校正作用,而在稳态时,反馈校正支路如同断路,不起作用。
二、反馈校正的作用
在图5-13中,设固有系统被包围环节的传递函数为G2(s),反馈校正环节的传递函数为GC(s),则校正后系统被包围部分传递函数变为
1.可以改变系统被包围环节的结构和参数,使系统的性能达到所要求的指标。
(1)对系统的比例环节G2(s)=K进行局部反馈
①当采用硬反馈,即GC(s)=α时,校正后的传递函数为
,增益降低为
倍,对于那些因为增益过大而影响系统性能的环节,采用硬反馈是一种有效的方法。
2当采用软反馈,即GC(s)=αs时,校正后的传递函数为
,比例环节变为惯性环节,惯性环节时间常数变为αK,动态过程变得平缓。
对于希望过度过程平缓的系统,经常采用软反馈。
(2)对系统的积分环节G2(s)=K/s进行局部反馈
1当采用硬反馈,即GC(s)=α时,校正后的传递函数为
含有积分环节的单元,被硬反馈包围后,积分环节变为惯性环节,惯性环节时间常数变为1/(αK),增益变为1/α。
有利于系统的稳定,但稳态性能变差。
②当采用软反馈,即GC(s)=αs时,校正后的传递函数为
,仍为积分环节,增益降为1/(1+αK)倍。
(3)对系统的惯性环节
进行局部反馈
1当采用硬反馈,即GC(s)=α时,校正后的传递函数为
惯性环节时间常数和增益均降为1/(1+αK),可以提高系统的稳定性和快速性。
②当采用软反馈,即GC(s)=αs时,校正后的传递函数为
,仍为惯性环节,时间常数增加为(T+αK)倍。
2.可以消除系统固有部分中不希望有的特性,从而可以削弱被包围环节对系统性能的不利影响。
当G2(s)GC(s)》1时,
所以被包围环节的特性主要由校正环节决定,但此时对反馈环节的要求较高。
第四节复合校正
一、按输入补偿的复合校正
当系统的输入量可以直接或间接获得时,由输入端通过引入输入补
偿这一控制环节时,构成复合控制系统,如图5-14所示。
C(s)=G2(s){GC(s)R(s)+G1(s)〔R(s)-C(s)〕}
=G2(s)GC(s)R(s)+G1(s)G2(s)R(s)-G1(s)G2(s)C(s)
整理得
误差
如果满足1-GC(s)G2(s)=0,即GC(s)=1/G2(s)时,则系统完全复现输入信号(即E(s)=0),从而实现输入信号的全补偿。
当然,要实现全补偿是非常困难的,当可以实现近似的全补偿,从而可大幅度地减小输入误差改善系统的跟随精度。
二、按扰动补偿的复合校正
当系统的扰动量可以直接或间接获得时,可以采用按扰动补偿的复合控制,如图5-15所示。
不考虑输入控制,即R(s)=0时,扰动作用下的误差为
如果满足1+Gd(s)G1(s)=0,即Gd(s)=-1/G1(s)时,则系统因扰动而引起的误差已全
部被补偿(即E(s)=0)。
同理,要实现全补偿是非常困难的,但可以实现近似的全补偿,从而可大幅度地减小扰动误差,显著地改善系统的动态和稳态性能。
由于按扰动补偿的复合校正具有显著减小扰动稳态误差的优点,因此,在一切较高的场合得到广泛应用。
小结
系统校正就是在原有的系统中,有目的地增添一些装置(或部件),人为地改变系统的结构和参数,使系统的性能得到改善,以满足所要求的性能指标。
根据校正装置在系统中所处位置的不同,一般可分为串联校正、反馈校正和复合校正。
串联校正对系统结构、性能的改善,效果明显,校正方法直观、实用。
但无法克服系统中元件(或部件)参数变化对系统性能的影响。
反馈校正能改变被包围环节的参数、性能,甚至可以改变原环节的性质。
这一特点使反馈校正,能用来抑制元件(或部件)参数变化和内、外扰动对系统性能的消极影响,有时甚至可取代局部环节。
在系统的反馈控制回路中加入前馈补偿,可组成复合控制。
只要参数选择得当,则可以保持系统稳定,减小乃至消除稳态误差,但补偿要适度,过量补偿会引起振荡。
思考题与习题
5-1什么是系统校正?
系统校正有哪些类型?
5-2
PI调节器调整系统的什么参数?
使系统在结构上发生怎样的变化?
它对系统的性能有什么影响?
如何减小它对系统稳定性的影响?
5-3PD控制为什么又称为超前校正?
它对系统的性能有什么影响?
5-4图5-16为某单位负反馈系统校正前、后的开环对数幅频特性曲线,比较系统校正前后的性能变化。
5-5
图5-17为某单位负反馈系统校正前、后的开环对数幅频特性曲线,写出系统校正前后的开环传递函数G1(s)和G2(s);分析校正对系统动、静态性能的影响。
5-6试分别叙述利用比例负反馈和微分负反馈包围振荡环节起何作用?
5-7若对图5-18所示的系统中的一个大惯性环节采用微分负反馈校正(软反馈),试分析它对系统性能的影响。
设图中1=0.2,K2=1000,K3=0.4,T=0.8s,β=0.01。
求:
1未设反馈校正时系统的动、静态性能。
2增设反馈校正时,再求系统的动、静态性能。
 升级会员
升级会员 