石门电厂给水自动控制系统及其仿真要点.docx
《石门电厂给水自动控制系统及其仿真要点.docx》由会员分享,可在线阅读,更多相关《石门电厂给水自动控制系统及其仿真要点.docx(13页珍藏版)》请在冰豆网上搜索。
石门电厂给水自动控制系统及其仿真要点
电厂给水自动控制系统及其仿真
电厂中普遍采用的给水自动控制系统,主要为三冲量给水自动控制系统。
其控制任务是维持锅炉汽包水位一定的范围内变化,是保持汽机和锅炉安全运行的重要条件。
为适应机组容量的增加,对给水控制高质量要求,计算机仿真技术的应用对自动控制系统进行稳定性、可靠性的综合研究分析是一种很有效的手段。
现在大学计算机仿真教育应用比较广泛是矩阵实验室MATLAB,而大唐集团很多电厂则依托于新华XDPS系统。
两套软件系统互有优劣,在实际的研究工作中,把两者结合起来应用更有参考意义和价值。
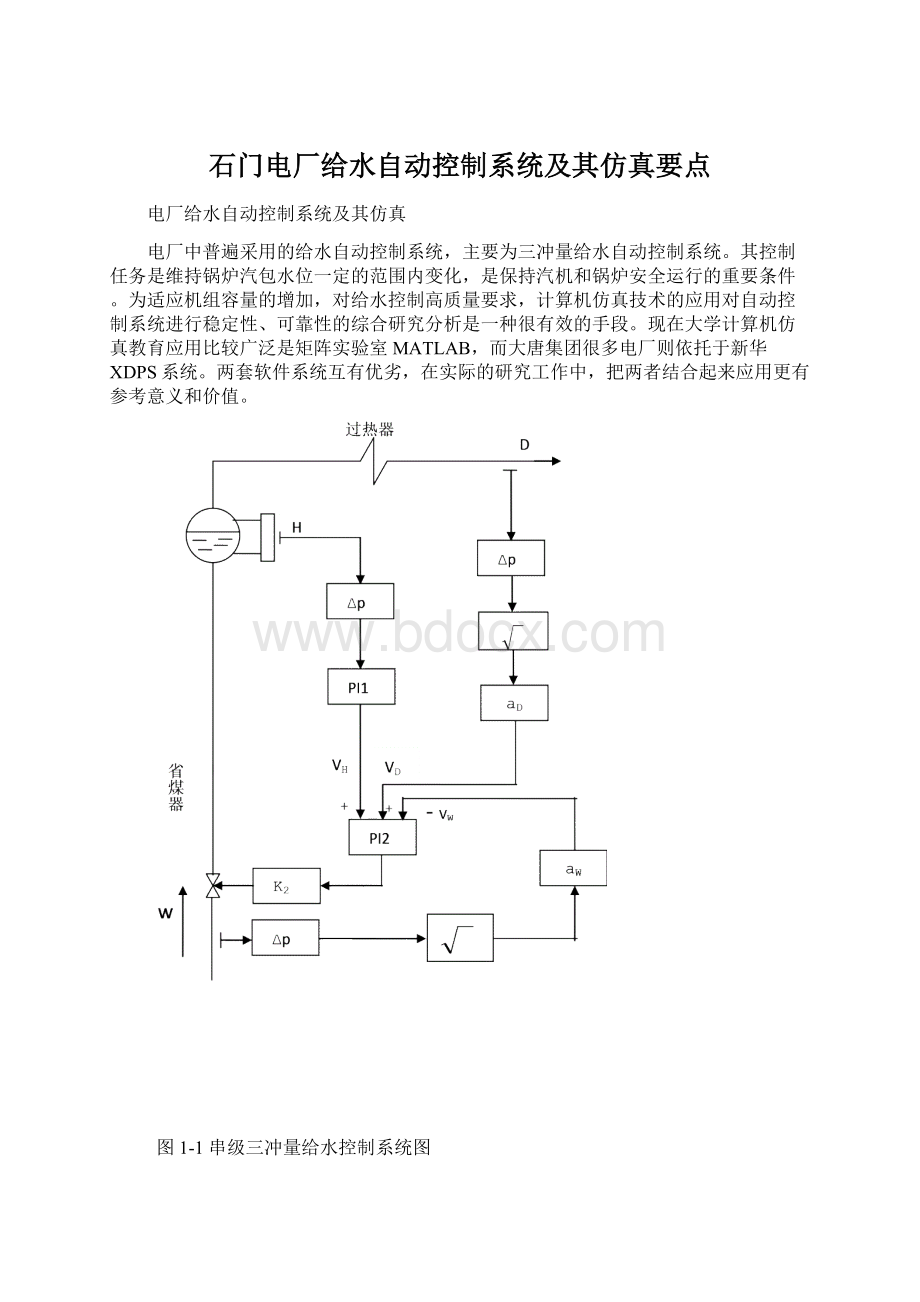
图1-1串级三冲量给水控制系统图
汽包锅炉给水自动调节的任务主要包括两方面:
一是维持汽包水位在规定的范围内波动,水位过高会影响蒸气品质,水位过低会影响锅炉的寿命甚至安全;二是及时调整给水流量,维持其与蒸汽流量间的平衡关系,以适应负荷变化的要求。
在锅炉给水调节系统中,汽包水位是被调量,而引起汽包水位变化的主要扰动是锅炉的蒸汽流量(蒸发量)和给水流量。
为了使锅炉运行时把汽包水位控制在较小的范围内变化,生产上常采用以蒸汽流量、给水流量为前馈信号,而以被调量汽包水位进行反馈调节,组成一个前馈一反馈系统。
由于调节系统接收三个调节信号:
水位H,蒸汽流量D和给水流量G,故常称为三冲量给水自动调节系统。
目前电厂三冲量给水调节系统主要用串级调节的方式来实现,其控制系统图和方框图分别如图1-1和图1-2所示。
图1-2串级三冲量给水调节系统原理图
这一调节系统的主要特点是:
水位调节器接受水位、蒸汽流量、给水流量这三个变量(所以成为三冲量),依据这三个信号的综合来调整给水流量。
该系统的主要优点是:
由于前馈通道的引入,能够克服”虚假水位”的影响;由于内回路使用了给水流量反馈信号,能够迅速克服水泵压力变化、阀门蠕动等引起的给水流量扰动的影响;由于主调节器采用PI调节规律,以保证水位无静态偏差,主调节器的输出信号和给水、蒸汽流量信号都作用到副调节器。
这样,系统就具有更好的动态、静态特性。
下面将介绍给水自动调节系统模块中的串级三冲量给水自动调节的参数整定过程。
根据控制原理图1.2在MATLAB7.0下的Simulink里做出的控制器仿真结构图如图1.3所示。
图1-3串级三冲量给水调节系统仿真图
其中Step、Step1、Step2为阶跃函数模块,它们可分别对系统施加定制和扰动;PIDController为比例加积分运算模块,构成系统的主调节器;PIDController1为比例运算模块构成副调节器,实现串级控制;TransferFcn1、TransferFcn分别代表对象调节通道和对象外扰通道;Gain-Gain6为增益模块;Scope为示波器模块,用来显示水位变化的曲线。
在系统仿真模型建立后,对PIDController、PIDController1所代表的控制系统的主副调的参数进行调解,观察控制系统的控制效果。
在上图所示的仿真环境下,对象调节通道和对象外扰通道的数学模型分别为:
和
。
在系统仿真模型建立之后,对PIDController、PIDController1所代表的控制系统的主副调的参数进行调解,观察控制系统的控制效果。
(1)调节比例增益
给水流量、蒸汽流量不变,即W=0,D=0,汽包水位定值H施加20%阶跃扰动时,对控制系统施加不同的比例增益,通过仿真,得到控制系统的一组响应曲线如图1-4。
图1.4主副调节器比例增益(Kp)不同时的仿真曲线图
从图1-10的仿真曲线图可以看出,主、副调节器的比例增益对控制系统的超调量和调节时间都有影响。
分析上图得到不同的主、副调节器比例增益(kp)对锅炉给水控制系统的影响,见下表1-1所示。
表1-1主、副调节器比例增益(kp)不同时对给水系统的影响
主调节器比例系数kp
副调节器比例系数kp1
超调量
调节时间(s)
30
6
49%
31
5
7
16%
25
4
5
8%
23
3
5
3%
29
从以上仿真曲线图可以看出,串级三冲量给水控制系统在进行比例增益(Kp)调节时,系统控制效果比较好,能稳定运行,但比例(P)调节器只适合于干扰小,对象的滞后较小而时间常数并不太小,调节精度要求不高的场合。
当主调节器比例增益为3,副调节器比例增益(Kp2)为5时,控制效果比较理想,其仿真曲线如图1.5所示。
图1.5Kp=3,Kp1=5时的仿真曲线图
(2)调节比例、积分增益
PID控制规律中,积分控制的作用主要是消除系统的稳态误差。
只要系统存在误差,积分控制作用就不断积累,因此只要有足够的时间,积分控制将能完全消除误差,但积分作用太强会使系统超调加大,甚至使系统出现振荡;所以在整定控制系统的控制参数时,对于积分作用的适当应用,将会改善系统的控制效果,提高控制系统的控制精度。
给水流量扰动和蒸汽流量扰动保持不变,汽包水位定值H施加20%阶跃扰动时,进行主副调节器比例、积分(PI)调节的仿真,其控制效果如表1-2,仿真曲线如图1.6所示。
表1-2主副调节器(PI)参数不同时对串级三冲量给水控制系统的影响
主调节器
副调节器
超调量
控制过程时间(s)
Kp
Ki
Kp1
3
0.4
7
53%
75
2.5
0.3
6
47%
78
2
0.1
5
26%
63
3
0.08
5
16%
125
5.8
0.05
1.8
10%
150
5.8
0.075
1.8
8%
180
图1.6串级三冲量控制主副调节器参数不同时对给水定值扰动的仿真曲线图
图1.7Kp=5.8,Ki1=0.075;Kp1=1.8时的仿真曲线图
从以上仿真曲线图1.6分析可知,串级三冲量控制在改变主副PI调节器参数时,系统的控制效果将在很大程度上有所改变,为了得出主副调节器的最佳参数,我们需要经过大量仿真实验进行试探。
当Kp=5.8,Ki=0.075;Kp1=1.8时,系统超调量为8%,控制过程时间为180s,控制效果较好,能稳定运行,其仿真曲线如图1.7所示。
通过以上仿真试验,得出了给水定值扰动时串级三冲量控制主、副调节器的参数,系统超调量小、控制过程时间短、能较好地满足给水控制的要求。
(3)扰动对水位的影响
汽包水位保持定值,蒸汽流量不变,即H=0,D=0,加入内扰,通过仿真,得到控制系统的一组抗内扰曲线系统在不同阶跃扰动时的抗内扰能力如表1-3,仿真曲线如图1.8、1.9所示。
表1-3系统在不同阶跃扰动时抗内扰能力的比较
阶跃扰动
最大波动量
控制时间(S)
5%
0.028
350
10%
0.057
350
15%
0.084
350
30%
0.164
350
50%
0.256
350
100%
0.560
350
图1.8给水流量施加5%、10%、15%阶跃扰动时的仿真曲线图
图1.9给水流量施加30%、50%、100%阶跃扰动时的仿真曲线图
通过以上仿真曲线图可知,串级三冲量给水控制系统抗内扰能力非常强,且最大波动量小、控制过程时间较短,满足给水控制的要求,系统运行稳定。
汽包水位定值和给水流量保持不变,即H=0,W=0,主副调节器参数不变,蒸汽流量施加不同阶跃扰动的仿真。
系统在不同阶跃扰动时的抗外扰能力如表1-4,仿真曲线如图1.10、1.11所示:
表1-4系统在不同阶跃扰动时抗外扰能力的比较
阶跃扰动
最大波动量
控制过程时间(S)
5%
0.017
40
10%
0.033
40
15%
0.051
40
30%
0.11
40
50%
0.17
40
100%
0.33
40
图1.10蒸汽流量施加5%、10%、15%阶跃扰动时的仿真曲线图
图1.11蒸汽流量施加30%、50%、100%阶跃扰动时的仿真曲线图
通过以上仿真曲线图可知,随着外扰的增加,控制系统的最大波动量越来越大,控制时间不变。
保持汽包水位不变,加入内、外扰通过仿真,得到控制系统的一组抗内、外扰曲线,如图1-12。
图1-12控制系统内、外扰实验仿真图
随着内、外扰的加入,给水控制系统的控制时间变长,而且最大波动量也变化较大,见表1-5:
表1-5抗内外扰实验对系统的影响
内扰
外扰
最大波动量
控制时间(s)
10%
10%
0.058
350
30%
30%
0.172
350
50%
50%
0.290
350
70%
70%
0.408
350
100%
100%
0.585
350
在串级三冲量给水自动调节系统整定过程中,可以将副回路处理为具有近似比例特性的快速随动系统,以使副回路具有快速消除内扰及快速跟踪蒸汽流量的能力。
整定主回路时,可将副回路近似看作比例环节,把主调节回路等效为一个单回路调节系统,再将主回路按单回路系统的整定方法进行整定。
因为串级三冲量给水调节系统中,水位偏差完全由主调节器来校正,使静态水位总是等于给定值。
在上面的仿真图1.7中,我们给出的主、副调节器参数分别为Kp=5.8,Ki=0.075,Kd=0;Kp1=1.8,Kd1=0。
上面我们通过矩阵实验室MATLAB仿真了串级三冲量给水自动调节的参数整定过程,那么在实际的生产现场,我们又是通过什么方式来完成这一步么?
以石门电厂所采用的是XDPS系统为例,这套系统是一个融计算机、数据库、网络、信息技术和自动控制技术为一体的工业信息技术系列产品。
它有比MATLAB具更强大的功能,具有开放式结构、模块化设计技术、合理的软硬件功能配置和易于扩展等特点,广泛应用于电厂的分散控制、电厂调度、电网自动化等。
这么一个强大的软件系统是如何运行的呢?
我们以仿真为例,XDPS系统仿真是建立在虚拟DPU基础上的,所谓DPU指的是分布式处理单元,它是WDPF高速数据公路上的一个站。
有时,DPU又被称为多用途控制器MAC(Multi-ApplicationController)。
它能执行工程师组态的控制策略,它既可实现离散梯形逻辑控制,也能实现连续调节控制。
DPU可执行70多种特殊功能及150多种过程控制算法;此外,它还能实现数据采集、标度变换、报警限值检查、操作记录、顺序事件记录等功能。
虚拟DPU,顾名思义,即通过计算机模拟,来实现控制单元的仿真过程。
下面将侧重论述XDPS系统虚拟DPU在我们工作和生活的应用,具体解读它是怎么实现仿真的。
第一步:
安装虚拟网卡
1.打开控制面板,切换到经典模式
2.双击“添加硬件”,打开“添加硬件向导”
3.点击“下一步”
4.选择“是,我已经连接了此硬件”
5.选择“添加新的硬件设备”,然后点击“下一步”
6.选择“安装我手动从列表选择的硬件(高级)(M)”,点“下一步”
7.选择“网络适配器”,点“下一步”
8,左侧框里选择“Microsoft”,右侧框里选择“MicrosoftLoopbackAdapter”,点击“下一步”
10.点击“下一步”
11.点“完成”,完成虚拟网卡的安装
第二步:
配置虚拟网卡IP
1.右键点击桌面上“网上邻居”,打开网络连接对话框
2.右键点击新安装的虚拟网卡,选择“属性”,打开属性对话框
3.双击“Internet协议(TCP/IP)”选项,打开IP配置的对话框
4.填入IP地址222.222.221.1(随意,只要符合IP地址的一般规则就行,也可以照图做),子网掩码是255.255.255.0
5.点“确定”---“确定”完成虚拟网卡的IP配置
第三步:
配置xnet.ini文件
在电脑的C:
\windows\system32目录下,找到xnet.ini文件,双击用记事本打开(或者开始---运行--输入xnet.ini---即用记事本打开了xnet.ini文件),修改里面的虚拟网卡IP地址,改为222.222.221.1,子网掩码是255.255.255.0。
第四步:
设置虚拟DPU(VDPU)
打开D:
\xdps6.0\bin复制VDPU文件夹,粘贴两次,分别命名为VDPU16、VDPU17两个文件夹,再分别打开这两个文件夹,修改其中的Vdpu.cfg文件(用记事本打开修改),把NODE数据改为对应的16、17。
这样就完成了虚拟DPU的设置了,当然如果你需要使用到更多虚拟DPU的话,可以多复制几次,不过要记得修改其中的Vdpu.cfg文件。
第五步:
导入项目数据文件
1.将电厂的项目数据文件复制到D:
\xdps6.0文件夹下,例如,我电脑上的某电厂的数据文件夹就叫“data”;
2.“data”项目数据文件夹里一般至少含有如下三个文件夹(ENG、FIG、LIB);
3.其中我电脑上这个电厂的ENG文件夹里有如下文件,其中画圈的两个文件是对初学者来说比较重要的,Mminode.cfg为netwin软件启动设置的配置文件,show.ini为DCS画面显示的配置文件;
4.放置好项目数据文件以后,打开“开始”---“运行”---输入“xdb.ini”----打开xdb.ini文件,其中的UserPath=D:
\xdps6.0\data是项目数据的路径,这里根据你电脑上项目数据放置的。
第六步:
使用虚拟DPU学习XDPS系统
1.打开D:
\xdps6.0\bin中VDPU16、VDPU17两个文件夹其中的一个,我们打开VDPU16;
2.开启Vdpu程序(对应16号Vdpu);
3.开启XDPSNetWin主程序,现在看到网络A通了;
4.点击DPU组态,我们用的是16号Vdpu,因此DPU号为16,IP地址为我们之前我们设置好的222.222.221.1,用户名和密码均为eng;
5.利用该虚拟DPU,我们可以读入你想要研究的组态文件;
6.比如我们要查看Dpu07的内容,选择好并打开该TXT文件,确认后,下装即可进入组态(如下图),然后就可以模拟组态了。
现代工业仿真技术呈现出两种趋势,一方面虚拟现实技术的大力发展使得工业场景更加真实,另一方面虚拟控制技术的发展使得仿真系统对大型工业过程及其控制系统的分析、优化更加真实可靠。
而我们通XDPS系统软件的仿真方法,再结合矩阵实验室MATLAB,可以很好的、更加真实、低成本再现工艺流程和工业环境。
这符合了技术发展的潮流,也为我们的工作和学习带来了便利。
摘要
本论文中,利用SIMULINK对汽包锅炉串级三冲量给水控制系统进行了仿真研究。
系统具有响应快、超调小、抗干扰能力强等特点,能较好地满足在给水正常情况下的控制要求,具有较高的实用价值。
论文引入了大量的图片、公式,使得整个课程生动活拨,在改善软件学习方面它将提供直观的帮助。
关键词:
SIMULINK;汽包锅炉串级三冲量给水控制系统;仿真;XDPS
 升级会员
升级会员 