理论力学静力学典型习题+答案.docx
《理论力学静力学典型习题+答案.docx》由会员分享,可在线阅读,更多相关《理论力学静力学典型习题+答案.docx(28页珍藏版)》请在冰豆网上搜索。
理论力学静力学典型习题+答案
1-3试画出图示各结构中构件AB的受力图
1-4试画出两结构中构件ABCD勺受力图
1-5试画出图a和b所示刚体系整体各个构件的受力图
1-5a
1-5b
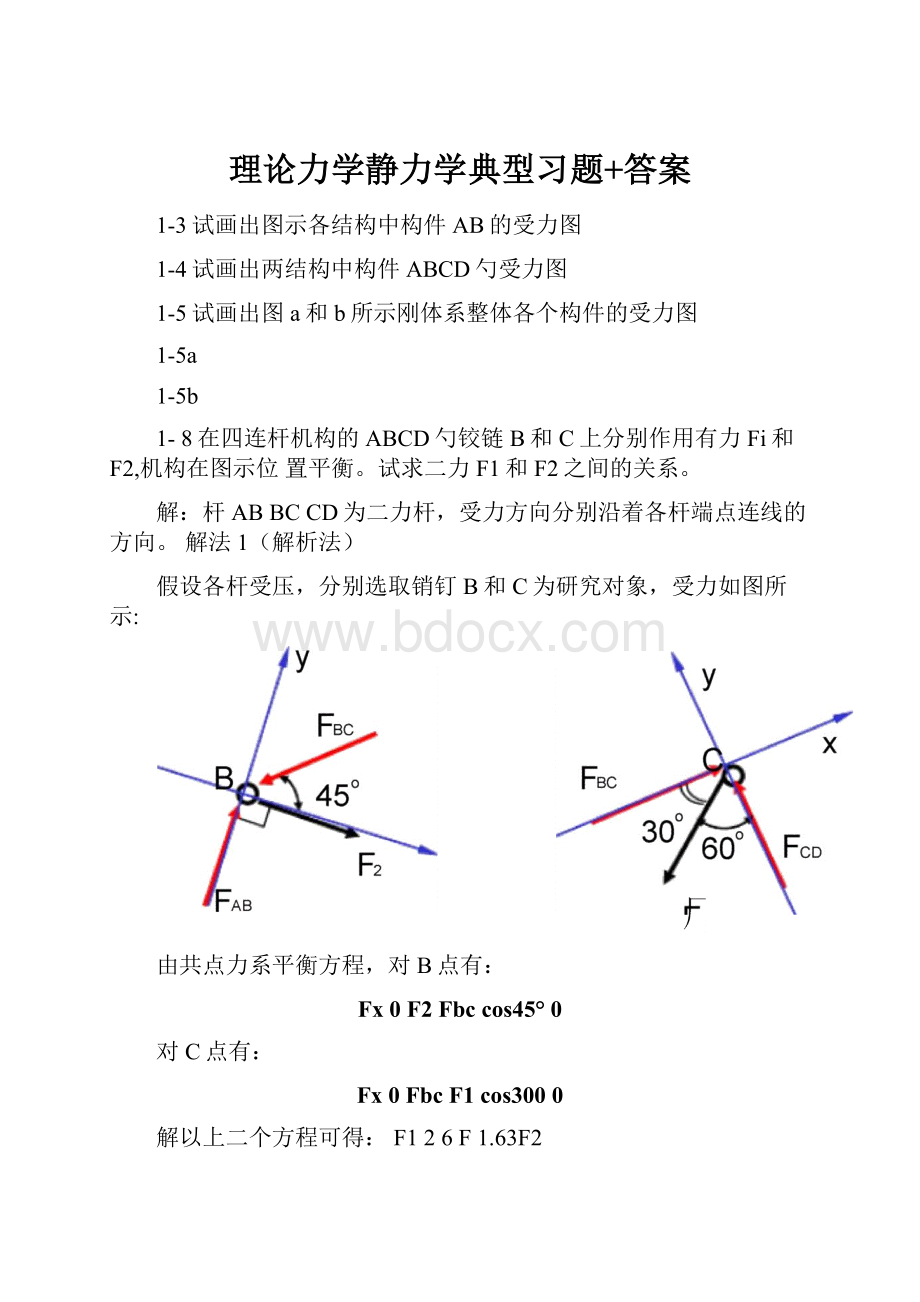
1-8在四连杆机构的ABCD勺铰链B和C上分别作用有力Fi和F2,机构在图示位置平衡。
试求二力F1和F2之间的关系。
解:
杆ABBCCD为二力杆,受力方向分别沿着各杆端点连线的方向。
解法1(解析法)
假设各杆受压,分别选取销钉B和C为研究对象,受力如图所示:
由共点力系平衡方程,对B点有:
Fx0F2Fbccos45°0
对C点有:
Fx0FbcF1cos3000
解以上二个方程可得:
F126F1.63F2
解法2(几何法)
分别选取销钉B和C为研究对象,根据汇交力系平衡条件,作用在B和
C点上的力构成封闭的力多边形,如图所示。
对B点由几何关系可知:
F2Fbccos450
对C点由几何关系可知:
FbcF1COS300
解以上两式可得:
F11.63F2
2-3在图示结构中,二曲杆重不计,曲杆AB上作用有主动力偶M试求A和C点处的约束力。
解:
BC为二力杆(受力如图所示),故曲杆AB在B点处受到约束力的方向沿BC两点连线的方向。
曲杆AB受到主动力偶M的作用,A点和B点处的约束力必须构成一个力偶才能使曲杆AB保持平衡。
AB受力如图所示,由力偶系作用下刚体的平衡方程有(设力偶逆时针为正):
M0Fa10asin(450)M0FA0.354M
其中:
tan-。
对BC杆有:
FCFbFa0.354M
3a
A,C两点约束力的方向如图所示。
2-4
解:
机构中AB杆为二力杆,点A,B出的约束力方向即可确定。
由力偶系作用下刚体的平衡条件,点0,C处的约束力方向也可确定,各杆的受力如图所示。
对
13
1
3
-6a
F1
Fi
Fj
F2
Fi
F3-
Fi-
—Fj
22
2
2
Fr
Fi
3FjMA
■-3
FakFr
Ma
V3da
Fr
2Fi
2
4
d
3
a
Fx0Psin
FBx
0Fy
0FBy
PPcos
0
Fx0
4
FAx
FBx
0Fy0
FAy
FBy0
M
A0M
AFBy
l0
求解以上三式可得:
M13Nm,FabFo
Fc5N,方向如图所示
Psin
A
FBx
FAx
MyOpetanFBCcoscFBCsinetan0Fbc60.6N
2
Mx'
0P
1
aFbcFbcsin
2
a
0Fb
100N
Fy
0fz
0
FAy,Fa;
zM
x0Mde0f2
cos450
0f2
0
MAO
0
F6cos45°a
Fcos450cos450a
0
F6
2
f
MBH
0
2
F4cos450a
F6cos450a0
F4
2f
MAD
0
2
F1a
F6cos450aFsin450a0
£
12
f
MCD
0
2
F1a
F3a
Fsin45°a0
F3
1f
MBC
0
2
Fx
0
F3a
F5a
F4cos450a0F5
0
M
1500N
cm
Fy
0
Mo
0
FA,FNA,FB,FNB,
tan
3(fsi
fs2)F
NB
0tan6002a
Mc
0
fs2fsi
23
FBy2a0FBy
0
Mh0
FDyaF
a0FDyF
Mb
0
Fi
F2
Fdxa
F
2a0Fdx
2F
Fy0
FAy
FDy
FBy0
FAy
F
Ma
0
FDxaFBx2a
0
FBx
F
Mb
0
Fax2a
FDx
a
0
FAx
F
Mc0FDb
F
x
0Fd
-F
Ma
0Fbb
F
x
0
b
0
M
FD)b
FAC
Ay
d2m
F(bF2x)
FbFiFa
Aab
FaF3Fx
Ay
Fi
F3cos4500F1M
2qa
Fy
0
F2
a
F2
ZMr
(2qa)Fx0Fax
F3cos45(
00Fax
(M
a
a
FAy
F2F3sin450P4qa
0
FAy
P
4qa
Ma
F2aP2a4qa2a
F3sin450
'3a
M
0
Ma
2
4qa2PaMMA
0FBy2a
f
2a
0FBy
f
Ay2aF2a0Fa『
FFx
0FaxF
BxF
F3
2qa)
F
0
Fe
f
2
MC0FBxaFBya
v2(MFax2qxa)
a
Fesin450a0FBx
Me
Mb
FBy
f
Fnd
F3sin450
Fy
Ma
Mb
0Fbx
Ma
N13rP3rcos600
2
0Ni6.93(N)
Fx
FAx
N1sin60°
Fax6(N)
Fy0
FAy
N1cos600
P0FAy
12.5'(N)F
N1cos300
Tcos300
6.93(N)
Ma
Fn2Lsin
2P-cos
2
Mb
FnLsin
PLcosFsLcos
2
FsPFs
Fntan
100Frc
FrdFrc,FrdFrc,Frd
22
Ma0Fnda
I0Fnd
Ma0FncaFl0Fnc-FFnd
a
Mo0FscRFsdR0
FNC
Fx0
sin
F—ff
SDNCND
1cos1cos
sin
1cos
tan—,fSDtanFrc,F
22
2
1cos
Frc
SDFnd
Fsd0
tan—
2
If
a
Fl
acos—
2
P
Frc
sin[180°
(18002
sin]
f
tan
Flsin
ISD
(Pa
Fl)(1
cos)
Fy
0
Fnd
PFscsin
Fnd
P
Fl((cosa
sin
tan—)
2
fSD
tan
Flsin
(Pa
Fl)(1
cos)
Fbf
ACF
BFac
tan
1F
3
(Fnd
P)
RM
D0
Fb\
Me
(P
Fne)1
Rtan
0Fnd
Md
Me
!
fr
Md
Fnd
B
P
Lf
a
Ma
Me
Fy
Fx
4fsP4fsP}fs,13fs}
Fsc%
Fx0
Fnccos
tan
Flsin
(PaFl)(1cos)
Fncsin
Fsccos
FSD0
Fnd
FSD
Me
1FFne
FNE
FsDtan2
Fnd
Fmin{—P,」P,
RR31
FSD
FNE
Fse
f
0
2P
RMd
FseR
FSD
3FFsd
fsFND
Mf
Mg
Fse;F
FSEfsFNE
Fmax0.36
0.091(N)
0.91(Ncm)
Me
Ficos6
Fisin
FhS4Fg
C
3FhC0
3\
F3
31.3
Fi
Fy
F218.3
FCD0
14.58(kN)
Fx
F2
Ficos
FbcEOs450
FAy
Fbc
n45
FCD5FCGcos
0Fcgsin
tan
Fbc
Ma
B
环B2sF2aFFb
FaF23a0f27F
6
3a
Fb2.5F
Fx
Fy
0.586F
MC0
5F定由
6
OC,DE组成的系统为研究对象,该系统具有理想约束。
作用在系统上的
Fx
02FF1F20F1
杆OA
主动力为F,Fm。
2.该系统的位置可通过杆OA与水平方向的夹角B完全确定,有一个自由度。
选参数B为广义坐标。
3.在图示位置,不破坏约束的前提下,假定杆
OA有一个微小的转角SB,相应
的各点的虚位移如下:
JOA
rB
OB
,re
rD6D
rB
re,
rDrE
代入可得:
rA30
rE
4.由虚位移原理W(Fi)
0有:
FrAFM
rE
(30F
Fm)
rE0
对任意rE0有:
Fm30F,物体所受的挤压力的方向竖直向下
4-4
解:
4a
1.选杆AB为研究对象,该系统具有理想约束。
设杆重为P,作用在杆上的主动力
为重力。
2.该系统的位置可通过杆AB与z轴的夹角B完全确定,有一个自由度。
选参数
B为广义坐标。
由几何关系可知:
杆的质心坐标可表示为:
tan
Zc
a
1
cos
2
tan
3.在平衡位置,不破坏约束的前提下,假定杆AB逆时针旋转一个微小的角度
SB,则质心C的虚位移:
a
~2
sin
4.由虚位移原理W(Fi)0有:
Zasin
1
cos
2
解:
4b
1.选杆AB为研究对象,该系统具有理想约束。
设杆重为P,作用在杆上的主动力
为重力。
2.该系统的位置可通过杆AB与z轴的夹角B完全确定,有一个自由度。
选参数
B为广义坐标。
由几何关系可知:
杆的质心坐标可表示为:
R
Zc
sin
3.在平衡位置,不破坏约束的前提下,假定杆
SB,则质心C的虚位移:
4.由虚位移原理W(FJ0有:
PZc
P
(iR2sin
-cos
”0
对任意
0有:
R
l.
.2
—cos
sin
0
sin
2
即平衡时
角满足:
2Rcos
3
lsin
00
4-5
解:
1.选整个系统为研究对象,
此系统包含弹簧。
设弹簧力
F1,F2,且F1F2,
将弹簧力视为主动力。
此时作用在系统上的主动力有F1,F2,以及重力P。
2•该系统只有一个自由度,选定为广义坐标。
由几何关系可知:
zAzBasin
3.在平衡位置,不破坏约束的前提下,假定有一个微小的虚位移SB,则质心的虚位移为:
ZcZaZbaCOS
弹簧的长度|2asin—,在微小虚位移sb下:
2
lacos—
2
4.由虚位移原理W(Fi)0有:
PzCF2l(PacosF2acos3)0
其中F2k(2asin—a),代入上式整理可得:
22
a
[2Pcoska(2sincos)]0
22
由于a0,对任意0可得平衡时弹簧刚度系数为:
2Pcos
a(2sincos)2
4-6
解:
解除A端的约束,代之以Fax,FAy,MA,并将其视为主动力,
受到主动力F1,F2,F3,M的作用。
系统有三个自由度,选定
xa,yA和梁AC的转角为广义坐标。
1•在不破坏约束的前提下给定一组虚位移Xa0,yA0,
图所示。
由虚位移原理W(FJ0有:
FaxXa0
对任意xa0可得:
FAx0
2•在不破坏约束的前提下给定一组虚位移xa0,yA0,
下图所示。
由虚位移原理W(Fi)0有:
FAyyAF!
yF2y2F3y3M0
此外系统还
A点的位移
0,如
0,如
(1)
由几何关系可得各点的虚位移如下:
1
y23yc
3
1
1
—
yc
yA
3
3
代入
(1)式:
(FAy
F1
+F3
*)
3
3
yiycy3yA
yA
对任意xa0可得:
FAy4(kN),方向如图所示
3.在不破坏约束的前提下给定一组虚位移上图所示。
由虚位移原理W(FJ
MAF1yiF2y2
有几何关系可得各点的虚位移如下:
yi2y3
y2
代入⑵式:
(Ma2FiF23F3
对任意0可得:
Ma7(kN
Xa
0,鸟A
0,
0,如
0有:
F3y3
M
0
(2)
yc3
M)
0
m),
逆时针方向。
4-7
解:
将均布载荷简化为作用在CD中点的集中载荷f3,大小为6q
1.求支座B处的约束力
解除B点处的约束,代之以力FB,并将其视为主动力,系统还受到主动力
F1,F2,F3,M的作用,如图所示。
在不破坏约束的前提下,杆AC不动,梁CDB
只能绕C点转动。
系统有一个自由度,选转角
为广义坐标。
给定虚位移
由虚位移原理W(Fi)
0有:
FBrBcos450
m
F2y2
cos1500F3y30
(1)
各点的虚位移如下:
rB62
y2
9
y33
代入
(1)式整理可得:
93
(6FBM
2
F2
3F3)
0
对任意
0可得:
FB18.6(kN),方向如图所示
2.求固定端A处的约束力
解除A端的约束,代之以Fax,FAy,MA,并将其视为主动力,系统还受到
主动力F1,F2,F3,M的作用。
系统有三个自由度,选定A点的位移xA,yA和梁AC的转角为广义坐标。
2a.求Fax
⑵
各点的虚位移如下:
代入
(2)式整理可得:
2b求FAy
在不破坏约束的前提下给定一组虚位移xA0,yA0,0,
此时梁AC向上平移,梁CDB绕D点转动,如上图所示。
由虚位移原理
W(Fi)0有:
FAy-A
F3
y3
F2
y2cos300M
0⑶
各点的虚位移如下:
1
1
1
1
y
y
3
yc
yk
—
yyA
2
2
3
6
代入(3)式整理可得:
1
3
1
(Fa-
F3
F2
M)yA
0
2
4
6
对任意yA0可得:
FAy3.8(kN),方向如图所示
2c.求M
在不破坏约束的前提下给定一组虚位移XA0,yA0,0,此
W(Fi)
时梁AC绕A点转动,梁CDB^移,如上图所示。
由虚位移原理
有:
4-8
1•求杆1受力
去掉杆1,代之以力P1,系统有一个自由度,选AK与水平方向的夹角为
广义坐标,如上图所示。
在不破坏约束的条件下给定一组虚位移,此时三角形ADK形状不变,绕A点转动,因此有rDAD,rKAK,且:
「Da,「K3a
滑动支座B处只允许水平方向的位移,而杆BK上K点虚位移沿铅垂方向,故B点不动。
三角形BEK绕B点旋转rEBE,且:
j5a
对刚性杆CD和杆CE由于rDCD,rECE,因此rc0。
由虚位
移原理W(Fi)0有:
(F1P1)rDcos600P1rEcos6000
代入各点的虚位移整理可得:
(Fi2PJa
2•求杆2受力
去掉杆2,代之以力p2,系统有一个自由度,选BK与水平方向的夹角为
广义坐标,如上图所示。
在不破坏约束的条件下给定一组虚位移,杆AK绕A点
转动,因此有rKAK,且:
rK3a
同理可知B点不动,三角形BEK绕B点旋转丨BE,且:
向如图所示,且:
代入各点的虚位移整理可得:
(Fi23P2)
3•求杆3受力
去掉杆3,代之以力P3,系统有一个自由度,选AK与水平方向的夹角为广义坐标,如上图所示。
在不破坏约束的条件下给定一组虚位移,三角形ADK
绕A点转动,rDAD,rKAK,且:
4a,g3a
同理可知B点不动,rEBE,且:
GGarc0
由虚位移原理W(FJ0有:
cos12000
F1rDcos600P3rEcos1500P3rK
代入各点的虚位移整理可得:
(Fi23P3)a0
对任意0可得:
p33Fi(受拉)
36
4-12铅垂力F为常力
解:
F大小和方向不变,常力也是有势力。
取杆和弹簧构成的系统为研究对象。
该系统为保守系统,有一个自由度,选为广义坐标,如
图所示。
取0为零势能位置,则系统在
任意位置的势能为:
VV弹Vf
不稳定平衡位置
4-15
解:
取半径为r的半圆柱为研究对象,圆心为C。
半圆柱作纯滚动,有一个自由度,取两个半圆心连线与y轴夹角为广义坐标。
作用在半圆柱上的主动力为
重力,系统为保守系统,如图所示,其中h
红。
由于半圆柱作纯滚动,有:
(1)
取坐标原点为零势能位置,则半圆柱在任意位置的势能为:
VmgzCmg[(Rr)cos
代入
(1)式有:
4rcos(
)]
Vmg[(Rr)cos
4rzRr
cos(-
3r
)]
dVd
mg(R
sin(旦
sin]
由平衡条件dVo可得
d
0为平衡位置。
势能V的二阶导数:
d2V
mg(R
r)[彎』cos(丄
3rr
cos]
由上式可得当R(3!
)r,0是稳定的
4
 升级会员
升级会员 