巨人通力调试资料解剖.docx
《巨人通力调试资料解剖.docx》由会员分享,可在线阅读,更多相关《巨人通力调试资料解剖.docx(64页珍藏版)》请在冰豆网上搜索。
巨人通力调试资料解剖
一.主要部件
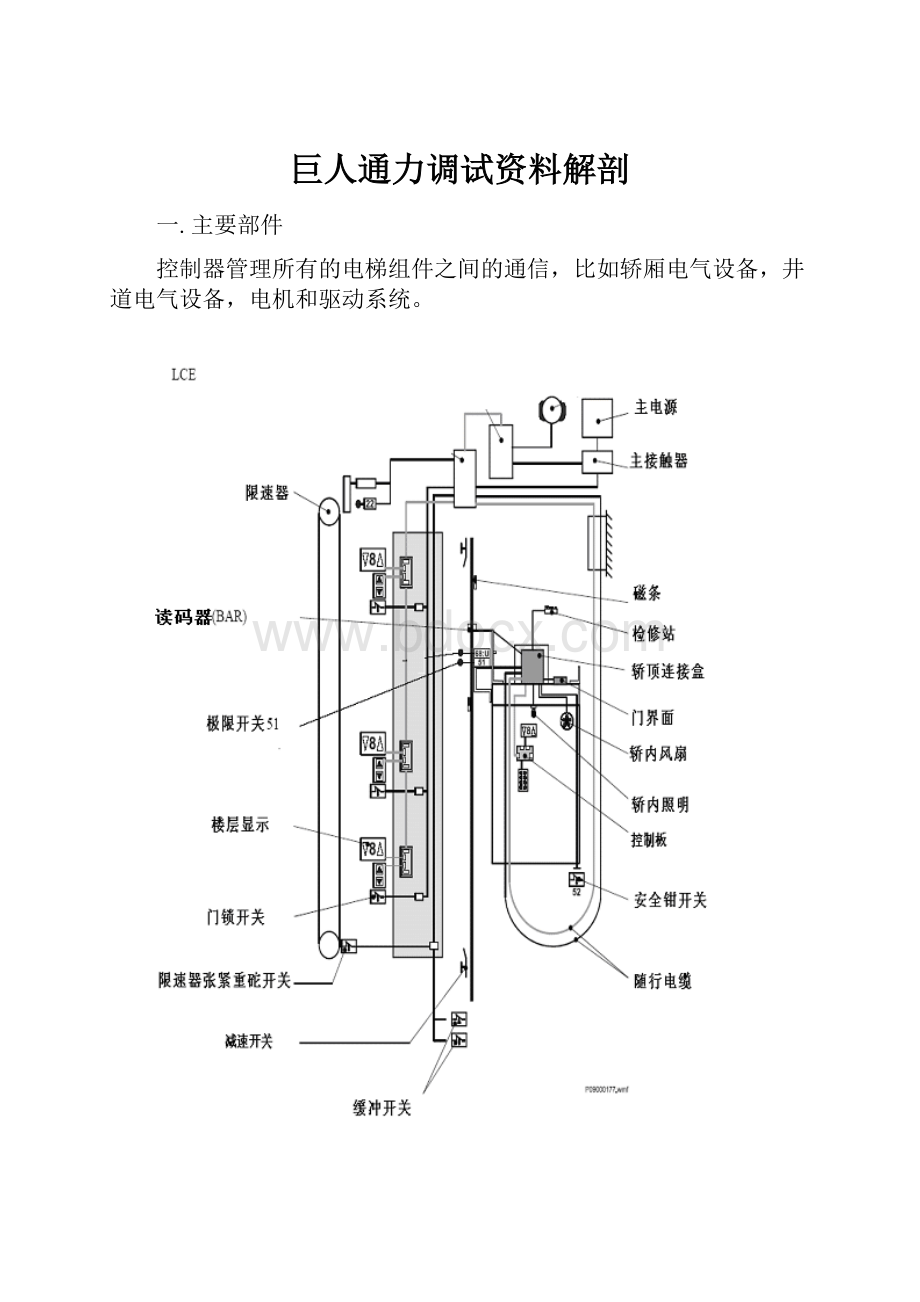
控制器管理所有的电梯组件之间的通信,比如轿厢电气设备,井道电气设备,电机和驱动系统。
二电气化部件
在下面的图表里,你可以看到运通产品的电气系统的结构。
它由许多pc板组成,
三.控制柜
3.1GPS20K,GP20K,GO20K控制柜排布
1.LCEDRV驱动模块2.LCECPU主控制器
3.LCECAN群控控制模块4.LCEKNX电梯运行模块
5.LCEADO安全回路模块6.LCEOPT控制功能板
7.LCEGTW群控控制模块8.LCEREC电源模块
9.变压器10.LCEBRK制动器控制模块
11.变压器12.相序保护器
13.空气开关14.变频器15.接触器16.接触器17.滤波器18.线排19.接地排
3.2GPN20K,GON20K控制柜排布
1.接触器
2.滤波器
1.接触器2.滤波器
3.变频器4.监视窗
5.三脚插座6.保险丝
7.相序8.主断路器
9.漏电断路器10.LCEDRV驱动板
11.LCECPU主控制板12.LCE230/LCEADO安全回路板
13.变压器14.LCEBRK抱闸模块
15.继电器16.线排
17.行程开关18.松闸扳手
19.按钮控制面板20.LCEREC电源板
21.LCEOPT功能板22.LCEGTW板
3.3安全回路
1.GPS20K,GP20K,GO20K安全回路图
2.无机房安全回路图
四用户界面的操作手册
4.1CPU用户界面的按钮
4.1.1用户界面的按钮
按钮和显示屏
1.功能模式
2.功能模式的显示
3.楼层(轿厢位置)
4.新楼层(目标楼层)
5.增加数值/楼层
6.选择数值/接受
7.上召
8.内召
9.限速器测试
10.子菜单
11.数值(调整值)
12.减小数值/楼层
13.下召
14.缓冲测试
用户界面的功能模式如下表所示
功能模式
功能模式显示
用户界面未被激活
无显示
错误标志
E
电梯参数
1
显示设置
3
状态显示和测试
4
调试
5
DRV参数
6
电梯参数
7
外部群组参数
8
如何通过用户界面召梯
下例描述了召梯的步骤。
在该例里,轿厢在2楼,你想要把它召至6楼
如何通过用户界面改变电梯参数
下例描述了改变"dooropentime"参数的步骤。
在该例里,开门时间为5秒,你要把它改为8秒
4.1.2LCE™用户界面的LEDs和按钮
LEDs
LCECPU板有绿色、红色和黄色的LEDs。
他们的意义如下:
绿色指正常操作电梯。
绿色的LEDs要一直打开
红色指系统故障。
该状态需要工程师来处理
黄色指操作模式。
LEDs根据状态可以发光和不放光
注意:
中间列从"SPEED>0,1M/S"到"SAFETYINPUT"的LEDs也表示启动时序。
左列LEDs的描述
LED
亮
灭
注释
Emergencyalarm(红色)
轿箱内报警按钮按上
没有报警
Liftinfault(红色)
电梯有故障
操作正常
CPUrunning
CPU运行
CPU不运行
当LED闪烁时CPU运行
Inspection(黄色)
轿顶检修状态
非轿顶检修
Rescuedrive(黄色)
RDF(紧急电动)状态
非RDF(紧急电动)
CarcommunicationOK(绿色)
表示LCECPU板与轿顶轿内通信正常
表示通信不正常
自学习前该灯可能不亮
Shaftcomm.OK(绿色)
LCECPU板与楼层板通信正常
井道通信不正常
自学习前该灯可能不亮
+24VcontrollerOK(绿色)
给控制器的+24V电压正常
没有+24V电压
如果LED不亮,检查LCEREC板上保险丝F5
+5VcontrollerOK(绿色)
给LCECPU的+5V电压正常
没有+5V电压
如果LED不亮,+24VLED亮,更换LCECPU板
+24VCarandshaftOK(绿色)
给轿厢和井道的+24V电压正常
没有+24V电压
如果LED不亮,检查LCEREC板上保险丝F4
Changeboard(红色)
CPU板故障
CPU板正常
如果LED亮,更换CPU板或芯片
中间列LEDs的描述
LEDs
亮
灭
注释
Speed>0.1m/s(黄色)
在加速时,速度>0.1m/s在减速时,速度>0.3m/s
未处于前述状态
Startpermit(黄色)
两个主接触器中任一闭合(201:
1,202:
2)
两个主接触器都未闭合
Maincontactor(黄色)
从LCECPU来的主接触器闭合命令有效
无效
Shaftdoorcontact(黄色)
所有厅门关闭
有厅门打开
XH2接插件为厅门
Cardoorcontact(黄色)
轿门关闭
轿门打开
XB7为轿门插件
Closedoorcommand(黄色)
关门命令有效
无关门命令
Driveneed(黄色)
需要驱动
不需要
V3FOK(绿色)
DRV板无故障
DRV板有故障
Safetyinput(绿色)
安全回路正常
安全回路故障
Opendoorcommand(黄色)
有开门命令
无开门命令
Openbutton(黄色)
轿厢内的开门按钮作用
未作用
Photocell(黄色)
光幕被阻挡
未被阻挡
Closeforcelimiter(黄色)
关门强迫极限要求重新开门
不作用
右列LEDs的描述
LEDs
亮
灭
注释
Driveup(黄色)
给DRV板上行命令
未给
77:
U(黄色)
轿厢在上强迫减速区
轿厢不在上减速区
61:
U(黄色)
轿厢在61:
U区
轿厢不在61:
U区
高于平层20mm/低于平层75mm
30(黄色)
轿厢在门区
轿厢不在门区
B30(黄色)
轿厢在后门区
轿厢不在后门区
61:
N(黄色)
轿厢在61:
N区
轿厢不在61:
N区
高于平层75mm/低于平层20mm
77:
N(黄色)
轿厢在下强迫减速区
轿厢不在下减速区
77:
S(黄色)
电梯在77:
S区域
电梯未在77:
S区域
未装77:
S开关时,该LED始终亮
Drivedown(黄色)
给DRV板下行命令
未给
LCECUP上的操作开关
Inhibitdooropening
当该开关打开且相对应的LED亮时,开门无效
Inhibitlandingcalls
当该开关打开且相对应的LED亮时,外召无效
4.1.3LCEDRV板部分LEDs的描述
LEDs
含义
Overload(黄色)
超载信号输入
FullLoad(黄色)
满载信号输入
61:
U(黄色)
61:
U信号输入
61:
N(黄色)
61:
N信号输入
CHB(黄色)
读码器B通道信号输入
CHA(黄色)
读码器A通道信号输入
ChangeBoard(红色)
DRV板故障
CpuRunning(绿色)
DRV运行
Thermistor(红色)
热敏电阻输入
Updir(黄色)
上行输出
Downdir(黄色)
下行输出
Highspeed(黄色)
高速输出
Lowspeed(黄色)
低速输出
BrakeOpen(黄色)
抱闸打开信号输出
Servicespeed(黄色)
中速输出
Stop(黄色)
使能信号输出
V3F10Fault(红色)
变频器故障信号输入
V3FMCEn(黄色)
主接触器闭合信号输出
五井道电气
5.1安装井道照明
如图所示,自行方线
5.2安装线槽
将线槽靠在井道壁上,固定线槽。
5.2安装预制线
步骤
动作
备注
1
在脚手架顶层工作台拆开井导电缆控制柜的端头,将端头拉入控制柜。
2
在控制柜内部排线。
3
不要将井道电缆插头连接到控制柜内的接线端子XH1和XH2上。
将控制柜线槽内的电缆端头绕起。
4
连接地线。
5
连接信号线插头到接线端子XH12。
6
将井道线束放入线槽。
放置第一块FCB板,位置接近门锁层。
对于贯通门,检查FCB上(X1)的设置。
7
为每层选分支电缆
●门锁电线
(1)122
●层门按钮电线
(2)
●指示器电线(3)
8
将分支电缆用固定夹固定在墙上。
该阶段只能连接P122插头至电梯井道线槽内。
所有其它的电线(按纽,指示器等)将在第5章连接。
9
继续安装至最低楼层。
(每层近门锁处放置FCB板)
10
放下剩余的电缆至底坑。
有消防功能时,将楼层消防功能线缆布进线槽,向上拉至控制柜。
六.安装底坑电气
步骤
动作
1
在井道底坑内钻孔,以备安装张紧装置开关、底坑急停开关和附加底坑设备(如有)的线缆固定装置。
2
在底坑地面上方0.5米处安装最低端的井道照明装置。
3
在层门底坎上方最多0.6米处安装照明开关。
4
若没有预先连接,则连接张紧装置开关线缆。
5
固定线缆并连接到井道线缆。
6
在最底层层门底坎上方最多0.6米的井道壁上安装底坑急停开关。
7
固定线缆并连接到井道线缆。
8
如可以,将对讲系统的插头固定到井道壁上
6.1安装井道开关组和急停开关
连接张紧装置触点电缆,连接缓冲开关电缆,连接急停开关。
在线槽中排线并连接至井道电缆。
(参照随机文件)
急停开关接P112:
1
张紧装置触点接P123:
1
缓冲开关触点接P125:
1,P125:
2
七.层站信号装置
7.1层站电气原理图
七.BAR钢带,门区,强迫减速开关77:
U,77:
N,极限撞弓
注意:
下列步骤为通慢车后安装,在开慢车前要保证所有安全装置(除极限撞弓外)均已经安装完毕,否则会造成人员严重伤害甚至死亡。
运行慢车步骤请参见G3008007(A)电气调试说明书。
7.1井道信号示意图
7.2BAR钢带安装总示意图
钢带要求与导轨平行
7.3安装BAR钢带
7.3.1安装上部横梁支撑支架
步骤
操作
图例
1
使用安全带,安全帽和手套
确保轿顶的检修运行单元工作正常
测量并记下BAR支撑支架到导轨侧面的尺寸X
在安装下部支架时需要这个尺寸
2
将固定装置安装在支架上
3
将钢带从盒子里卷出1米来
按图所示固定钢带上端,详见随机文件
4
向下驱动轿厢
提醒:
使用手套
5
一边向下运行,一边卷出电缆
将电梯停在最下面的第二个楼层,
将钢带盒子放到底坑
9
将电梯停到容易下到底坑的位置
按下急停按钮
7.3.2安装下部支撑支架和固定装置
步骤
操作
图例
1
使用安全帽和手套,如果有坠落的危险,请使用安全带
利用上面提到的X尺寸来固定固定装置,并锁紧螺母
2
剪断钢带,并检查是否打结
按图所示固定钢带下端,详见随机文件
7.4安装门区
当轿厢地坎和厅门地坎水平时,BAR读码器应该在门区的中心。
门区位置精确位置为:
±30mm
7.5安装钢带护叉
按下图所示固定钢带护叉,每10m安装一个,且必须安插于门区板上,保证钢带与导轨平行,钢带与导轨间距X不变。
7.6安装强迫减速磁钢
强迫减速磁钢安装如图,77:
N在钢带下端,77:
U在钢带上端,且不是同一侧:
减速C距离参考值如下表所示:
当77:
U所放置位置低于(顶层-1)层门区或当77:
N所放置位置高于2层门区时,必须在两个端点安装77:
S同步磁钢,并在轿顶安装77:
S同步开关。
磁钢位置为底层门区中心上方300mm及顶层门区中心下方300mm处。
装在轿顶的77:
S开关连接轿顶接线箱内LCECCBS的XB27口。
7.7检查BAR钢带安装是否正确定位
步骤
操作
图例
1
使用安全带、安全帽和手套
2
在轿顶选择检修运行,将轿厢从井道底部驱动至顶部,检查钢带是否在Bar读码器的中间位置
7.8安装极限开关
如图所示:
上撞弓装于电梯顶层平层时,极限开关上方150mm,下撞弓装于电梯底层平层时,极限开关下方150mm,两撞弓距导轨的距离相同
八.上电前检查
8.1.确保主开关置于OFF位
8.2.检查强弱电是否分开
8.3.检查强弱电是否对地
8.4.检查接地线是否均已连接
8.5.确保轿顶检修盒开关置于“正常”位置
8.6.检查轿顶板拨码开关位置是否正确
1FORCELIM.AON
2OPENENDAON
3CLOSEENDAON
4ON
5FORCELIM.BON
6OPENENDBON
7CLOSEENDBON
8ON)
8.7.将紧急电动开关置于“ON”位
8.8.将主开关置于ON位
8.9.将空气开关286关置于“ON”位
九.慢车运行
9.1按紧急电动“运行”按钮,检查SAFETYINPUTLED是否点亮,如不亮则检查安全回路。
9.2如变频器未进行自学习,则需进行自学习操作,步骤如下:
9.2.1同步曳引机情况
9.2.1.1电机电流自学习:
1电机参数(Startup/Startupconfig/Entersetupmode/Motordata)
额定电压(Ratedvoltage)电机铭牌
额定电流(Ratedcurrent)电机铭牌
额定转速(Ratedspeed)电机铭牌
极对数(Polepairs)电机铭牌
转矩常数(Torqueconstant)额定转矩/额定电流
反电势常数(EMFconstant)0V*S
定子阻值(Statorresistance)0ohm
电抗值(LsSinductance)0H
2电流自学习(Startup/Startupconfig/Entersetupmode/Autotune/CurrReg)
拆下抱闸线,同时按住控制柜上的运行按钮和任一方向按钮,再按变频器的Enter键,然后按键,开始自学习。
9.2.1.2静态编码器原点自学习
1拆下抱闸线
2进入REGULATIONPARAM/Fluxconfig/Magnetizconfig/StillAutophasing
注:
访问变频器REGULATIONPARAM菜单,必须在“SERVICE/InsetPassword”参数中输入口令12345,并按Enter键确认。
在变频器每次重启动后时必须重新输入1级口令。
2选择AutophasingStillStart?
按Enter键
3当变频器显示“Waitingstart…”时,同时按住控制柜上的运行按钮和任一方向按钮;
4当变频器显示“AutophasingEnd”时,移去使能和方向
5执行Startup/Saveconfig
学习完毕后装上抱闸线
9.2.2异步曳引机
9.2.2.1电机电流磁场自学习:
拆下抱闸线,进入Startup/Startupconfig/Entersetupmode/Completestillautotune菜单同时按住控制柜上的运行按钮和任一方向按钮,再按变频器的Enter键,然后按键,开始自学习。
学习完毕后装上抱闸线
9.3第一次慢车运行
9.3.1同步曳引机运行时进行慢车运行时,需查看电梯检修运行速度是否正常,如不正常则重新进行编码器原点自学习,如仍不正确,则需先交换变频器输出至曳引机线的相序,交换后重新自学习。
9.3.2将紧急电动开关置于“ON”位,同时按紧急电动运行按钮和下行按钮,查看电机转动方向是否正确。
如不正确,则修改Travel/Speedsetpoint/Spdrefsrc中Speedrefinvsrc的设定值,如为NULL则改为ONE,如果是ONE则改为NULL。
如变频器出现保护,则根据附录二变频器故障一节排除。
9.3.3查看抱闸,如有必要,可调整抱闸
9.4轿顶检修运行
9.4.1将轿顶检修开关置于“ON”位
9.4.2将紧急电动开关置于“OFF”位
9.4.3按轿顶检修盒上的运行按钮和任一方向按钮运行电梯
如电梯不运行,则检查:
1.底坑缓冲开关是否动作
2.极限开关是否动作
3.如电梯无法上行,则检查XB45上的短接线是否有效
4.如电梯开至77:
U或77:
N磁钢即停车,则检查1-71参数是否设为3
十.快车调试
10.1井道自学习(5-2-1)
步骤
行为
注释
1
RDF(紧急电动)开关值ON
2
LON下载
1.进入菜单5
2.选择子菜单7
3.设参数值为2
该过程可能会有5分钟或更久,请耐心等待。
在显示器上
5____
5_7__
5_7_2
3
学习结束后需重启
4
将轿箱在RDF模式下开到底层,确保CPU板上的下列LED均亮:
61U,30,77N,77S
5
进入井道自学习
1.进入菜单5
2.选择子菜单2
3.设参数值为1
在显示器上
5____
5_2__
5_2_1
6
进入井道自学习模式
将紧急电动开关打到OFF
轿箱自动以检修速度上行
7
学习结束后需重启
如将紧急电动开关打到OFF后,电梯无法运行,则检查
1.LCECPU上的LEDSaftyinput是否亮,如果不亮则检查
安全回路是否断开
2.检查参数4.1中是否显示为0
若不为0,则查看对应模式开关的状态(参见表一)
3.检查门
确认没有门打开
确认光幕未动作
确认没有开门按钮动作
4.确认超载装置未作用
5.CLOSEFORCELIMITED灯不亮,如亮则检查轿顶拨码开关是否正确
表一:
参数4.1
4.1
电梯模式
*
*
0=正常,1=检修,2=Sync,
3=消防,4=EPD,5=ATS,
6=PRLL*,8=PAD,9=DOPCS,
10=OSS,11=PRC,13=FPO,
14=H4,15=PRLH*/HEL,
16=EAQ,17=FRE,18=电梯关闭,
19=ETSL错误,20=NTS错误
显示电梯操作模式。
与TMS600显示板上相同
Sync=同步驱动,EPD=紧急电源驱动,ATS=司机功能,PRL=优先外召,OSS=退出服务,PRC=轿内优先,FPO=全离群,H4=楼层校正,EAQ=地震,FRE=快速回召,ETSL=紧急端站减速,NTS=正常端站停车
10.2减速距离学习
步骤
行为
1
按内召将电梯开至底层,CPU板上的下列LED均亮:
61U,30,77N,77S
2
RDF(紧急电动)开关置ON
3
5_5设置为1
4
RDF(紧急电动)开关置OFF
5
电梯自动进行减速距离学习
6
学习结束后需重启
7
检查电梯每层是否能够达到所设定的高速和中速值,如果不能,则先检查6-28与6-34值是否为1.7。
如两参数均正确,则适当增加变频器RAMP参数下的加速和急加速值,并重新进行减速自学习。
检查电梯每层是否有稳定的爬行时间,如没有则先适当调大6.26参数值(1.5左右),如调大该参数后仍无法达到,则适当增大变频器RAMP参数下的减速和急减速值(加大80mm/s2左右。
切勿减小,减小后需重新自学习)。
10.3监控电梯正常运行时的电流
正常状态下电梯空载下行时在加速阶段电流最多比额定电流大5、6安培,速度稳定后电流不会大于额定电流;正常状态下电梯空载上行时电流一般最多为额定电流的一半左右,若观测到电流过大则需重新进行电流自学习和原点自学习。
10.4调节电梯舒适感
10.4.1速度曲线与时序
10.4.2PI调节
10.4.2.1起动过程的调整
加大TRAVEL/Speedreggains/Spd0Pgain与TRAVEL/Speedreggains/Spd0Igain,一般Spd0Igain比Spd0Pgain设的较大,直到起动不溜车为止,若设的太大会使系统产生震荡,若PI调的好可有效调整变频器的动态响应速度和稳速精度
起动时有震动,先判断震动产生在开闸之前还是在开闸之后,若在开闸之前则将TRAVEL/Liftsequence/Brakeopendelay加大,在加大后若发生起动时电梯有向较重侧一沉的感觉时则加大Spd0Igain,若发生在开闸之后则相应减小Spd0Igain与Spd0Pgain,若加大Spd0Igain时震动加大,但任无法解决起动时电梯向较重侧溜车则需逐步加大TRAVEL/Pre-torque/IntPre-torque至到此现象消失为止。
10.4.2.2加、减速过程中的调整
调整TRAVEL/Rampprofile中的MR0accinijerk、MR0acceleration使起动加速度适中过大会产生失重感,但要使在单层运行时有额定速度出现,并保持一断时间(1S以上),若做不到时需将相应速度降低。
RAVEL/Rampprofile中的MR0deceleration、MR0decendjerk使电梯跑单层与多层时都有较短的爬行距离,但要能看到稳定的爬行1S以上,必要时调整控制器的减速距离。
10.4.2.3高速过程中的调整
在高速时存在垂直震动时则相应加大TRAVEL/Speedreggains/Spd3Pgain、Spd3Igain若太大时会加大电机电流噪音,必要时适当减小REGULATIONPARAM/Currregulator/Percentvalues/CurrPgain
11.4.2.4停车的调整
若停车后感觉向下一层,则相应加长控制器上的抱闸关闭延时,或加高零速参考值TRAVEL/Speedthreshold/Spd0speedthr,若在爬行时就有震动感,则相应减小零速参考值TRAVEL/Speedt
 升级会员
升级会员 