带传动的动力学模型的建立.docx
《带传动的动力学模型的建立.docx》由会员分享,可在线阅读,更多相关《带传动的动力学模型的建立.docx(14页珍藏版)》请在冰豆网上搜索。
带传动的动力学模型的建立
1.1带传动的动力学模型
对于带传动而言,主要存在三种形式的振动:
一是传动系统沿两带轮中心连线方向的振动,即带传动的纵向振动;二是带沿与带的运动方向相垂直的方向的振动,即带传动的横向振动三是带传动的扭转振动。
这三种形式的振动对带传动的传动特性都将产生严重影响,尤其是当激励频率接近带传动系统的固有频率时,带传动系统将产生共振,并可能造成较大的危害。
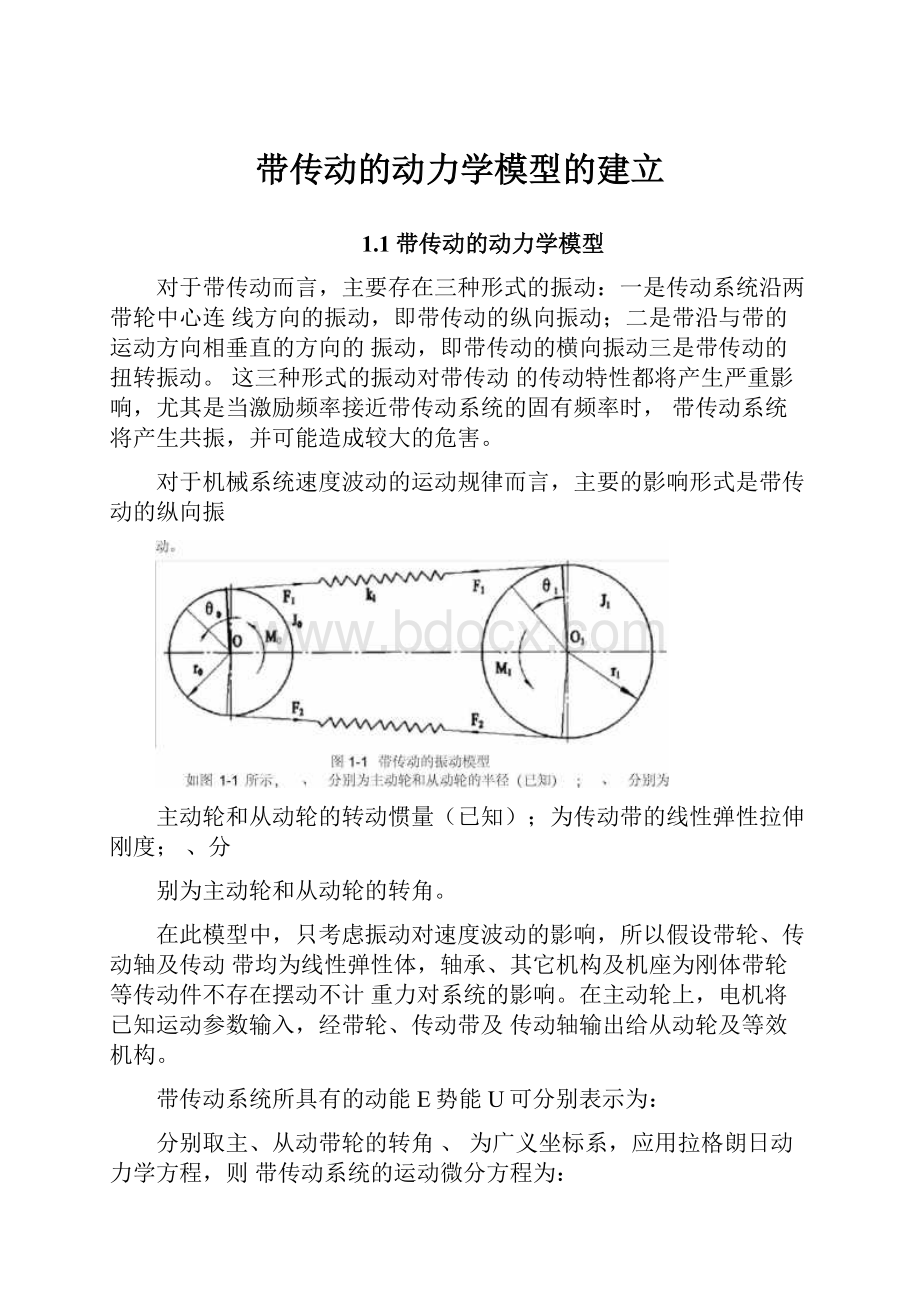
对于机械系统速度波动的运动规律而言,主要的影响形式是带传动的纵向振
主动轮和从动轮的转动惯量(已知);为传动带的线性弹性拉伸刚度;、分
别为主动轮和从动轮的转角。
在此模型中,只考虑振动对速度波动的影响,所以假设带轮、传动轴及传动带均为线性弹性体,轴承、其它机构及机座为刚体带轮等传动件不存在摆动不计重力对系统的影响。
在主动轮上,电机将已知运动参数输入,经带轮、传动带及传动轴输出给从动轮及等效机构。
带传动系统所具有的动能E势能U可分别表示为:
分别取主、从动带轮的转角、为广义坐标系,应用拉格朗日动力学方程,则带传动系统的运动微分方程为:
(1.1)
令:
(1.2)
则式(1.1)可以写成:
上式是带传动系统振动模型的运动方程。
1.1.2带传动的固有频率
设运动方程(1.3)的解为:
(1.4)
式中,振幅和、频率与相位角都是未知的。
将式(1.4)代入式(1.3)中,整理后可得:
由上式可见,贝
(1.5)
而式(1.4)在任何瞬时都可以满足系统振动模型的运动方程即式(1.3),且是微分方程式(1.3)的解。
同时当==0时,式(1.5)也成立,但式(1.5)只代表带传动系统平衡下的情况,不代表启动、加速、停止情况下的振动情形。
要使和有非零解,式(1.5)的系数行列式必须等于0,贝
(1.6)
通过整理可得:
(1.7)经观察可知,上式为的二次式,为振动模型的频率方程,解出两个根分别为:
————————(1.8)
将式(1.2)代入式(1.8)中,可得固有频率是:
__(1.8.1)
对于带传动系统,代入已知测量出来的数据,皮带的线性拉伸刚度,主
动带轮的转动惯量,从动带轮的转动惯量,主、从动带轮的半径值,可以
得出带传动系统的固有频率。
1.1.3带传动系统对外界激励的响应
在带传动过程中,始终存在预紧力,考虑到由带轮的偏心、传动系统启
动的不平稳等激励因素引起的、作用在主动轮上的等效简谐力矩为,
则带传动系统振动模型的运动方程可以改成:
式中,一,且上式为二阶线性常系数非齐次微分方程组,因此它的特解为稳定的等幅振动,系统按与激振力相同的频率作强迫振动。
设其解为:
(1.10)
其中,振幅、为未知常数。
然后把式(1.10)代入式(1.9)中,可得:
(1.11)通过解上式二元一次方程组,得:
(1.12)
其中,式中=,而
将式(1.2)、式(1.12)代入式(1.10)中,可得系统在激励作用下的响应为:
(1.13)
通过上述结果表明,系统做与激励同频率的简谐振动,其振幅不仅决定激励的幅值,更重要的是与系统的固有频率和激励频率有很大的关系。
又由式
(1.12)得,当激励频率等于系统的固有频率或时,系统振幅无限增大,即为共振。
1.2带传动的相对滑动对速度波动的影响
带传动是利用弹性环形带和带轮来传递运动和动力的,根据传动原理将其分为摩擦传动和啮合传动。
摩擦传动是传动带以一定的预紧力套在主动轮和从动轮上,依靠传动带与带轮表面之间的摩擦力来传递运动和动力。
啮合传动则是依靠传动带表面的带齿与带轮上的齿槽相啮合而传递运动和动力。
显然此次
系统中采用的是摩擦与啮合复合传动。
1.2.1带传动啮合特性及动态分析
同步带传动的带齿与轮齿的啮合是一种在节距相等下的嵌合,其动力是通过
齿之间的法向力和轮齿顶部与带齿根部的摩擦力以及带齿的弹性变形来传递的。
同时同步带传动又具有类似链传动的多边形效应,由此使得同步带传动的啮合具
有较复杂的性质。
基于以上原因在传动过程中会有振动的产生,这将直接影响到同步带传动的平稳性以及传动精度,一定程度上也影响带的使用寿命。
122带传动的受力分析
摩擦与啮合复合传动带在传动过程中,带与带轮的摩擦力不足以传动功率时,带与带轮之间出现相对滑动,如图所示,带齿与主动带轮开始啮合,在理想传动状态下,带齿与带轮均匀啮合,设每个带齿与带轮啮合产生的法向作用力为、
…。
小带轮啮合段的带体承受紧边拉力,松边拉力和沿包角变化的摩擦力
三个力作用。
图1-2带的受力分析
设为摩擦与啮合复合传动带在工作中的有效拉力,由摩擦与啮合传动原理可知:
(1.14)
由于摩擦与啮合复合传动带是挠性体由受力平衡可知:
(1.15)
在对主动轮围齿内啮合齿进行受力分析时,为便于分析建模,根据实际传动
情况,对模型进行以下假设:
1)为了简化模型,假设带齿啮合状态处于受力平衡,且带齿与轮齿啮合面间的摩擦力忽略不计;
2)带齿在啮合中无弹性回缩现象,不会出现跳齿,磨齿;
3)带在传动过程中,带齿的离心力忽略不计。
根据以上假设,如图2.15(a)所示,取啮合中第一个带齿为研究对象,带
齿1受轮齿法向力、紧边拉力、松边张力、带轮侧面的周向摩擦力2、带轮径向摩擦力、带轮侧面对带的正压力,处于静力平衡状态。
前面已作讨
论,带齿的垂直截面上,带轮径向摩擦力是沿带包角的一个变化量,如2.15(b)
所示。
、、与节圆切线方向的夹角分别为、、;为摩擦与啮合复合
传动带的楔角。
图1-3啮入处带体受力图
带齿水平与垂直方向受力平衡可得:
__(1.16)
式中、、为已知量,可根据带的拉力方向;为带齿啮合角;为带齿齿厚所对应的圆心角的一半,设S为节圆与带齿对应的节弧长,Z为小带轮齿数,
为小带轮节距,即:
—
(1.17)
图1-4带齿谷底受力图
带齿1的齿谷be部分受力如图1-4所示,由于带轮齿顶部与带齿谷底面非
接触。
摩擦力为0•但轮槽侧面对带侧面摩擦力符合摩擦传动原理。
根据欧拉公式一得带齿一得拉力与带齿二的拉力满足如下关系:
(1.18)
其中为带齿一与带齿二之间节圆弧所对应的圆心角
图1-5带齿二受力图
同理对带齿2,3…各齿进行受力分析,如图1-5所示,由力的平衡条件可得:
(1.19)
由此递推关系可得出第k齿两侧的张力为:
(1.20)
(1.21)
其中,式中的。
在带传动系统中进行啮合传动时。
啮合齿数可引入取整函数来近似表达在传动过程中。
(1.22)
啮合传动合力为:
2.1带传动的动态性能分析
带传动系统工作中的动态性能是对带的寿命研究的重要部分。
带的截面尺寸、
密度、转速、以预紧力和带轮的制造误差是产生振动的关键因素。
2.1.1带传动横向振动模型的建立
带在传递过程中的横向振动,可以把它简化为弦振动,以坐标原点为节圆切点,以x轴为振动的平衡位置,简化模型如图2-1(a)所示。
图2-1(b)为取带紧边中部的一段微元的受力分析图,列出y方向力的平
衡方程及在瞬时t时沿y方向的力平衡方程和力矩的平衡方程:
(2.1)
—一(2.2)
式中:
T带的预紧力;带单位长度的质量,带元的质量为dm=dx;
El――带的截面弯曲刚度;Q,Q+d带本身所受的剪应力,MM+d——带本
身所受的弯矩。
考虑到该带传动的振动是微小的,x0可以得到:
(2.3)
式中:
y(x,t)为带的变形量;
(2.5)
由材料力学可知:
弯矩与挠曲线的关系为:
—(2.6)
(2.7)
将式(2.3)、式(2.4)、式(2.5)和式(2.6)代入式(2.1)、式(2.2),经整理可得:
最后可得:
2.1.2带传动纵向振动模型的建立(附加另外一种方法)
摩擦与啮合复合传动带的纵向振动模型可以简化为梁振动的模型,带的两边简化为并联的弹簧和阻尼器,为等效轴系在传动过程中的变形,在其中一个带轮处施加阻尼约束带轮。
两带轮之间中心距可发生微量变化,简化模型如图2-2所示。
图2-2带传动的纵向振动模型
以从动轮2中心平衡位置时的位置为原点,系统的动能和势能在任意时刻t分别为:
(2.8)
带传动系统的阻尼力与外力所做虚功为:
其中,式中:
一一带的预紧力;、、一一弹簧刚度;、一一弹
簧阻尼的阻尼系数;一一从动轮2的质量;、一一两带轮绕轴心的转动惯
量;、两带轮的半径;从动轮的偏心距;、带轮1、带
轮2的角速度;、带轮1、带轮2的转角;电机施加在带轮1的转动力矩。
通过拉格朗日方程和虚功原理推导出摩擦与啮合复合带传动纵向振动方程为:
(2.12)式中:
一一质量矩阵;一一刚度矩阵;一一阻尼矩阵;一一外力矩阵。
上面四个矩阵的表达分别为:
假设驱动主动轮1的电机性能较好,主动轮的扭振可不考虑,
;;,则带传动系统可以看作双自由度的振动系统,其
运动方程为:
(2.13)
式中:
2.1.3带传动振动系统自由振动的频率
因系统的固有频率与系统的阻尼及外界激振关系较小,所以为简便起见,在运动微分方程(2.13)中,暂时不考虑阻尼及激振的作用,即令=[0],=[0],
则系统无阻尼时的自由振动微分方程为:
(2.14)
由于方程(2.14)中的刚度矩阵不是对角阵,即存在弹性耦合,不能直接求得其振动的固有频率。
可采用文献[1]中设定同步解的方法将运动微分方程简化为如下的频率方程:
(2.15)
式中,
为与系统参数有关的某一常数向量,
为系统的固有
频率。
为使、
具有非零解,式(2.15)的特征行列式必须等于零
即:
(2.16)
—
(2.17)
由式(2.17)解得振动系统的固有频率、分别为:
(2.18)
(2.19)
组成一矩阵
称为带传动系统的模态矩阵。
2.1.4带传动振动系统有阻尼时的激励响应
设激励是由从动轮的偏心引起,为求解运动微分方程(2.13),应首先将运动微分方程的弹性耦合进行解耦。
为此作如下坐标变换
(2.21)
将式(2.21)代入式(2.13)中可得:
(2.22)
方程式(2.22)两边同乘,得:
(2.23)其中:
将式(2.23)两边分别除以相应的模态质量为:
(2.24)
式中,2=
式(2.24)为两单自由度在有阻尼有激励的情况下的运动微分方程。
说明通过坐
标的变换(变换矩阵为模态矩阵),原有的运动方程式(2.13)已解耦。
所以、为振动系统的自然坐标。
设方程式(2.24)的解为:
(2.25)将式(2.25)代入式(2.24)中得:
———(2.26)
其中,一。
所以原方程式(2.13)的激励响应为:
(2.27)
(2.28)
 升级会员
升级会员 