单片机的数字温度计设计方案.docx
《单片机的数字温度计设计方案.docx》由会员分享,可在线阅读,更多相关《单片机的数字温度计设计方案.docx(19页珍藏版)》请在冰豆网上搜索。
单片机的数字温度计设计方案
基于单片机的数字温度计设计
引言
随着现代信息技术的飞速发展和传统工业改造的逐步实现.能够独立工作的温度检测和显示系统应用于诸多领域。
传统的温度检测以热敏电阻为温度敏感元件。
热敏电阻的成本低,但需后续信号处理电路,而且可靠性相对较差,测温准确度低,检测系统也有一定的误差。
与传统的温度计相比,这里设计的数字温度计具有读数方便,测温范围广,测温精确,数字显示,适用范围宽等特点。
选用AT89C51型单片机作为主控制器件,DSl8B20作为测温传感器通过4位共阳极LED数码管串口传送数据,实现温度显示。
通过DSl8B20直接读取被测温度值,进行数据转换,该器件的物理化学性能稳定,线性度较好,在0℃~100℃最大线性偏差小于0.1℃。
该器件可直接向单片机传输数字信号,便于单片机处理及控制。
另外,该温度计还能直接采用测温器件测量温度,从而简化数据传输与处理过程。
2系统硬件设计方案
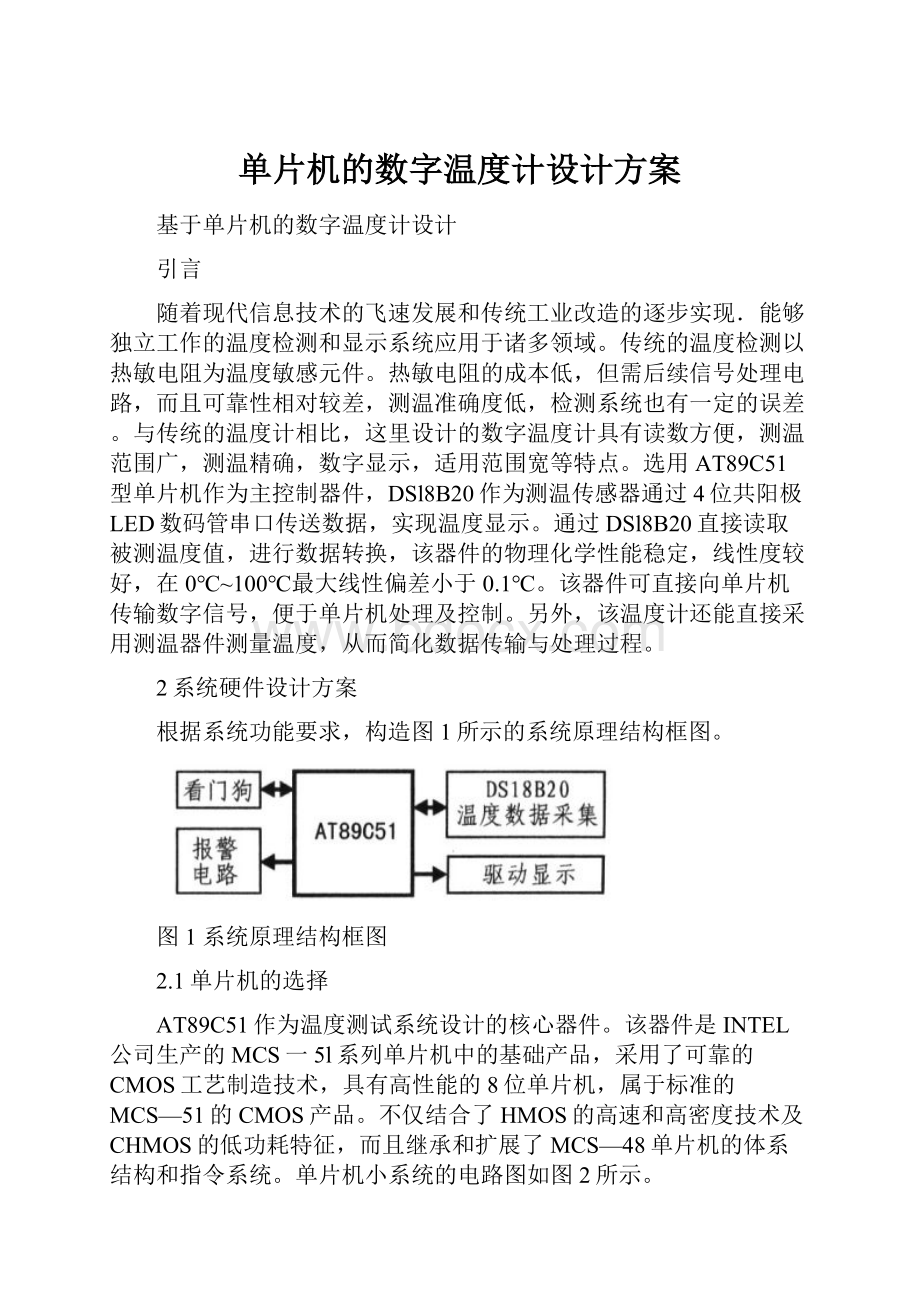
根据系统功能要求,构造图1所示的系统原理结构框图。
图1系统原理结构框图
2.1单片机的选择
AT89C51作为温度测试系统设计的核心器件。
该器件是INTEL公司生产的MCS一5l系列单片机中的基础产品,采用了可靠的CMOS工艺制造技术,具有高性能的8位单片机,属于标准的MCS—51的CMOS产品。
不仅结合了HMOS的高速和高密度技术及CHMOS的低功耗特征,而且继承和扩展了MCS—48单片机的体系结构和指令系统。
单片机小系统的电路图如图2所示。
图2单片机小系统电路
AT89C51单片机的主要特性:
(1>与MCS-51兼容,4K字节可编程闪烁存储器;
(2>灵活的在线系统编程,掉电标识和快速编程特性;
(3>寿命为1000次写/擦周期,数据保留时间可10年以上;
(4>全静态工作模式:
0Hz-33Hz;
(5>三级程序存储器锁定;
(6>128*8位内部RAM,32可编程I/O线;
(7>两个16位定时器/计数器,6个中断源;
(8>全双工串行UART通道,低功耗的闲置和掉电模式;
(9>看门狗(9>片内振荡器和时钟电路;
2.2温度传感器介绍
DS18B20可以程序设定9~12位的分辨率,精度为±0.5°C。
可选更小的封装方式,更宽的电压适用范围。
分辨率设定,及用户设定的报警温度存储在EPROM中,掉电后依然保存。
温度传感器DS18B20引脚如图3所示。
8引脚封装TO-92封装
图3温度传感器
引脚功能说明:
NC:
空引脚,悬空不使用;
VDD:
可选电源脚,电源电压范围3~5.5V。
当工作于寄生电源时,此引脚必须接地。
DQ:
数据输入/输出脚。
漏极开路,常态下高电平。
GND:
为电源地
DS18B20内部结构主要由四部分组成:
64位光刻ROM、温度传感器、非挥发的温度报警触发器TH和TL、配置寄存器。
光刻ROM中的64位序列号是出厂前被光刻好的,它可以看作是该DS18B20的地址序列码。
64位光刻ROM的排列是:
开始8位<28H)是产品类型标号,接着的48位是该DS18B20自身的序列号,最后8位是前面56位的循环冗余校验码光刻ROM的作用是使每一个DS18B20都各不相同,这样就可以实现一根总线上挂接多个DS18B20的目的。
DS18B20中的温度传感器可完成对温度的测量,以12位转化为例:
用16位符号扩展的二进制补码读数形式提供,以0.0625℃/LSB形式表达,其中S为符号位。
这是12位转化后得到的12位数据,存储在18B20的两个8比特的RAM中,二进制中的前面5位是符号位,如果测得的温度大于0,这5位为0,只要将测到的数值乘于0.0625即可得到实际温度;如果温度小于0,这5位为1,测到的数值需要取反加1再乘于0.0625即可得到实际温度。
例如+125℃的数字输出为07D0H,+25.0625℃的数字输出为0191H,-25.0625℃的数字输出为FF6FH,-55℃的数字输出为FC90H。
DS18B20温度传感器的内部存储器包括一个高速暂存RAM和一个非易失性的可电擦除的E2RAM,后者存放高温度和低温度触发器TH、TL和结构寄存器。
暂存存储器包含了8个连续字节,前两个字节是测得的温度信息,第一个字节的内容是温度的低八位,第二个字节是温度的高八位。
第三个和第四个字节是TH、TL的易失性拷贝,第五个字节是结构寄存器的易失性拷贝,这三个字节的内容在每一次上电复位时被刷新。
第六、七、八个字节用于内部计算。
第九个字节是冗余检验字节。
该字节各位的意义如下:
TMR1R011111
低五位一直都是1,TM是测试模式位,用于设置DS18B20在工作模式还是在测试模式。
在DS18B20出厂时该位被设置为0,用户不要去改动。
R1和R0用来设置分辨率,如表1所示:
表1DS18B20温度转换时间表
R1
R0
分辨率/位
温度最大转向时间
0
0
9
93.75
0
1
10
187.5
1
0
11
375
1
1
12
750
根据DS18B20的通讯协议,主机控制DS18B20完成温度转换必须经过三个步骤:
每一次读写之前都要对DS18B20进行复位,复位成功后发送一条ROM指令,最后发送RAM指令,这样才能对DS18B20进行预定的操作。
复位要求主CPU将数据线下拉500微秒,然后释放,DS18B20收到信号后等待16~60微秒左右,后发出60~240微秒的存在低脉冲,主CPU收到此信号表示复位成功。
2.3温度传感器与单片机的连接
温度传感器的单总线(1-Wire>与单片机的P2.0连接,P2.0是单片机的高位地址线A8。
P2端口是一个带内部上拉电阻的8位双向I/O,其输出缓冲级可驱动(吸收或输出电流>4个TTL逻辑门电路。
对该端口写“1”,可通过内部上拉电阻将其端口拉至高电平,此时可作为输入口使用,这是因为内部存在上拉电阻,某一引脚被外部信号拉低时会输出一个电流。
在访问外部程序存储器或16位地址的外部数据存储器时。
如执行MOVXDPTR指令,则表示P2端口送出高8位的地址数据。
在访问8位地址的外部数据存储器时,可执行MOVXRI指令,P2端口内容即为特殊功能寄存器(SFR>区中R2寄存器内容,整个访问期间不改变。
在Flash编程和程序校验时,P2端口也接收高位地址和其他控制信号。
图4为DSl8820内部结构。
图5为DSl8820与单片机的接口电路。
图4DS18B20内部结构图
图5DS18B20和单片机的接口连接
2.4复位信号及外部复位电路
单片机的P1.6端口是MAX813看门狗电路中喂狗信号的输入端,即单片机每执行一次程序就设置一次喂狗信号,清零看门狗器件。
若程序出现异常,单片机引脚RST将出现两个机器周期以上的高电平,使其复位。
该复位信号高电平有效,其有效时间应持续24个振荡脉冲周期即两个机器周期以上。
若使用频率为12MHz的晶体振荡器,则复位信号持续时间应超过2μs才完成复位操作。
2.5单片机与报警电路
系统中的报警电路是由发光二极管和限流电阻组成,并与单片机的P1.2端口连接。
P1端口的作用和接法与P2端口相同,不同的是在Flash编程和程序校验期间,P1接收低8位地址数据。
2.6电源电路
由于该系统需要稳定的5V电源,因此设计时必须采用能满足电压、电流和稳定性要求的电源。
该电源采用三端集成稳压器LM7805。
它仅有输入端、输出端及公共端3个引脚,其内部设有过流保护、过热保护及调整管安全保护电路.由于所需外接元件少,使用方便、可靠,因此可作为稳压电源。
图6为电源电路连接图。
图6电源电路连接图
2.7显示电路
采用技术成熟的74HCl64实现串并转换。
LED显示分为静态显示和动态显示。
这里采用静态显示,系统通过单片机的串行口来实现静态显示。
串行口为方式零状态,即工作在移位寄存器方式,波特率为振荡频率的1/12。
当器件执行任何一条将SBUF作为目的寄存器的命令时,数据便开始从RXD端发送。
在写信号有效时,相隔一个机器周期后发送控制端SEND有效,即允许RXD发送数据,同时允许从TXD端输出移位脉冲。
图7为显示电路的连接图。
图7显示电路的连接图
2.8看门狗电路
系统中把P1.6作为看门狗的“喂狗”信号;将MAX813的RESET与单片机的复位信号RST连接。
由于单片机每执行一次程序,就会给看门狗器件一个复位信号,这样也可以用手工方式实现复位。
当按键按下时,SW—SPST就会在MAX813引脚产生一个超过200ms的低电平,其实看门狗器件在1.6s时间内没有复位,使7引脚输出一个复位信号的作用是相同的,其连接图如图8所示。
图8看门狗器件的MAX813的连接图
3软件设计
DSl8820的主要数据元件有:
64位激光LaseredROM,温度灵敏元件和非易失性温度告警触发器TH和TL。
DSBl820可以从单总线获取电源,当信号线为高电平时,将能量贮存在内部电容器中;当单信号线为低电平时,将该电源断开,直到信号线变为高电平重新接上寄生(电容>电源为止。
此外,还可外接5V电源,给DSl8820供电。
DSl8820的供电方式灵活,利用外接电源还可增加系统的稳定性和可靠性。
图9为读取数据流程图。
图9读取数据的流程图
读出温度数据后,LOW的低四位为温度的小数部分,可以精确到0.0625℃,LOW的高四位和HIGH的低四位为温度的整数部分,HIGH的高四位全部为1表示负数,全为0表示正数。
所以先将数据提取出来,分为三个部分:
小数部分、整数部分和符号部分。
小数部分进行四舍五入处理:
大于0.5℃的话,向个位进1;小于0.5℃的时候,舍去不要。
当数据是个负数的时候,显示之前要进行数据转换,将其整数部分取反加一。
还因为DS18B20最低温度只能为-55℃,所以可以将整数部分的最高位换成一个“-”,表示为负数。
图10为温度数据处理程序的流程图。
图10温度数据处理流程图
4数据测试
将温度传感器与冰水混合物接触,经过充分搅拌达到热平衡后调节系统,使显示读数为0.00(标定0℃>;利用气压计读出当时当地的大气压强,并根据大气压强和当地重力加速度计算出当时的实际压强;根据沸点与压强的关系查出沸点温度。
把温度传感器放入沸水中,待显示读数稳定后重新调节,使显示器显示读数等于当地当时沸点温度后工作结束。
该温度计的量程为-50℃~150℃,读数精度为0.1℃,实际使用一般在0℃~100℃。
采用0℃~50℃和50℃~100℃的精密水银温度计作检验标准,对设计的温度计进行测试,其结果表明能达到该精度要求。
5总结与体会
作为一名电子信息工程的大四学生,我觉得做单片机课程设计是很有意义的,而且也是必要的。
在做这次课程设计的过程中,我感触最深的当属查阅大量的设计资料了。
为了让自己的设计更加完善,查阅这方面的实际资料是十分必要的,也是必不可少的。
其次,在这次课程设计中,我们运用了以前学过的专业课知识,如:
proteus仿真、汇编语言、模拟和数字电路知识等。
虽然过去我从未独立应用过他们,但在学习的过程中带着问题去学我发现效率很高,这是我做这次课程设计的又一收获。
最后,要做好一个课程设计,就必须做到:
在设计程序之前,对所用单片机的内部结构有一个系统的了解,知道该单片机有哪些资源;要有一个清晰的思路和一个完整的软件流程图;在设计程序时,不能妄想一次将整个程序设计好,反复修改、不断改进是程序设计的必经之路;要养成注释程序的好习惯,这样为资料的保留和交流提供了方便;在设计中遇到的问题要记录,以免下次遇到同样的问题。
在这次的课程设计中,我真正的意识到,在以后的学习中,要理论联系实际,把我们所学的理论知识用到实际当中,学习单片机更是如此,程序只有在经常写与读的过程中才能提高,这就是这次课程设计的最大收获。
附录1仿真图
附录2程序源代码
DATA_BUSBITP3.3
FLAGBIT00H。
标志位
TEMP_LEQU30H。
温度值低字节
TEMP_HEQU31H。
温度值高字节
TEMP_DPEQU32H。
温度小数
TEMP_INTEQU33H。
温度值整数
TEMP_BAIEQU34H。
温度百位数
TEMP_SHIEQU35H。
温度十位数
TEMP_GEEQU36H。
温度个位数
DIS_BAIEQU37H。
显示百位数
DIS_SHIEQU38H。
显示十位数
DIS_GEEQU39H。
显示个位数
DIS_DPEQU3AH。
显示小数位
DIS_ADDEQU3BH。
显示地址
ORG0000H
AJMPSTART
ORG0050H。
初始化
START:
MOVSP,#40H
MAIN:
LCALLREAD_TEMP。
调读温度程序
LCALLPROCESS。
调数据处理程序
AJMPMAIN
。
读温度程序
READ_TEMP:
LCALLRESET_PULSE。
调用复位脉冲程序
MOVA,#0CCH。
跳过ROM命令
LCALLWRITE
MOVA,#44H。
读温度
LCALLWRITE
LCALLDISPLAY。
显示温度
LCALLRESET_PULSE。
调用复位脉冲程序
MOVA,#0CCH。
跳过ROM命令
LCALLWRITE
MOVA,#0BEH。
读缓存命令
LCALLWRITE
LCALLREAD
RET
。
复位脉冲程序
RESET_PULSE:
RESET:
SETBDATA_BUS
NOP
NOP
CLRDATA_BUS
MOVR7,#255
DJNZR7,$
SETBDATA_BUS
MOVR7,#30
DJNZR7,$
JNBDATA_BUS,SETB_FLAG
CLRFLAG
AJMPNEXT
SETB_FLAG:
SETBFLAG
NEXT:
MOVR7,#120
DJNZR7,$
SETBDATA_BUS
JNBFLAG,RESET
RET
。
写命令
WRITE:
SETBDATA_BUS
MOVR6,#8
CLRC
WRITING:
CLRDATA_BUS
MOVR7,#5
DJNZR7,$
RRCA
MOVDATA_BUS,C
MOVR7,#30H
DJNZR7,$
SETBDATA_BUS
NOP
DJNZR6,WRITING
RET
。
循环显示段位
DISPLAY:
MOVR4,#200
DIS_LOOP:
MOVA,DIS_DP
MOVP2,#0FFH
MOVP0,A
CLRP2.7
LCALLDELAY2MS
MOVA,DIS_GE
MOVP2,#0FFH
MOVP0,A
SETBP0.7
CLRP2.6
LCALLDELAY2MS
MOVA,DIS_SHI
MOVP2,#0FFH
MOVP0,A
CLRP2.5
LCALLDELAY2MS
MOVA,DIS_BAI
MOVP2,#0FFH
MOVP0,A
MOVA,TEMP_BAI
CJNEA,#0,SKIP
AJMPNEXTT
SKIP:
CLRP2.4
LCALLDELAY2MS
NEXTT:
NOP
DJNZR4,DIS_LOOP
RET
。
读命令
READ:
SETBDATA_BUS
MOVR0,#TEMP_L
MOVR6,#8
MOVR5,#2
CLRC
READING:
CLRDATA_BUS
NOP
NOP
SETBDATA_BUS
NOP
NOP
NOP
NOP
MOVC,DATA_BUS
RRCA
MOVR7,#30H
DJNZR7,$
SETBDATA_BUS
DJNZR6,READING
MOV@R0,A
INCR0
MOVR6,#8
SETBDATA_BUS
DJNZR5,READING
RET
。
数据处理
PROCESS:
MOVR7,TEMP_L
MOVA,#0FH
ANLA,R7
MOVTEMP_DP,A
MOVR7,TEMP_L
MOVA,#0F0H
ANLA,R7
SWAPA
MOVTEMP_L,A
MOVR7,TEMP_H
MOVA,#0FH
ANLA,R7
SWAPA
ORLA,TEMP_L
MOVB,#64H
DIVAB
MOVTEMP_BAI,A
MOVA,#0AH
XCHA,B
DIVAB
MOVTEMP_SHI,A
MOVTEMP_GE,B
MOVA,TEMP_DP
MOVDPTR,#TABLE_DP
MOVCA,@A+DPTR
MOVDPTR,#TABLE_INTER
MOVCA,@A+DPTR
MOVDIS_DP,A
MOVA,TEMP_GE
MOVDPTR,#TABLE_INTER
MOVCA,@A+DPTR
MOVDIS_GE,A
MOVA,TEMP_SHI
MOVDPTR,#TABLE_INTER
MOVCA,@A+DPTR
MOVDIS_SHI,A
MOVA,TEMP_BAI
MOVDPTR,#TABLE_INTER
MOVCA,@A+DPTR
MOVDIS_BAI,A
RET
DELAY2MS:
MOVR6,#3
LOOP3:
MOVR5,#250
DJNZR5,$
DJNZR6,LOOP3
RET
TABLE_DP:
DB00H,01H,01H,02H,03H,03H,04H,04H,05H,06H
DB06H,07H,08H,08H,09H,09H
TABLE_INTER:
DB03FH,006H,05BH,04FH,066H
DB06DH,07DH,07H,07FH,06FH
END
 升级会员
升级会员 