工业镜头视场倍率焦距之间的关系.docx
《工业镜头视场倍率焦距之间的关系.docx》由会员分享,可在线阅读,更多相关《工业镜头视场倍率焦距之间的关系.docx(12页珍藏版)》请在冰豆网上搜索。
工业镜头视场倍率焦距之间的关系
工业镜头的视场、倍率、焦距之间的关系
、焦距的计算方法
二、光学放大倍率的计算方法
三、视场的计算方法
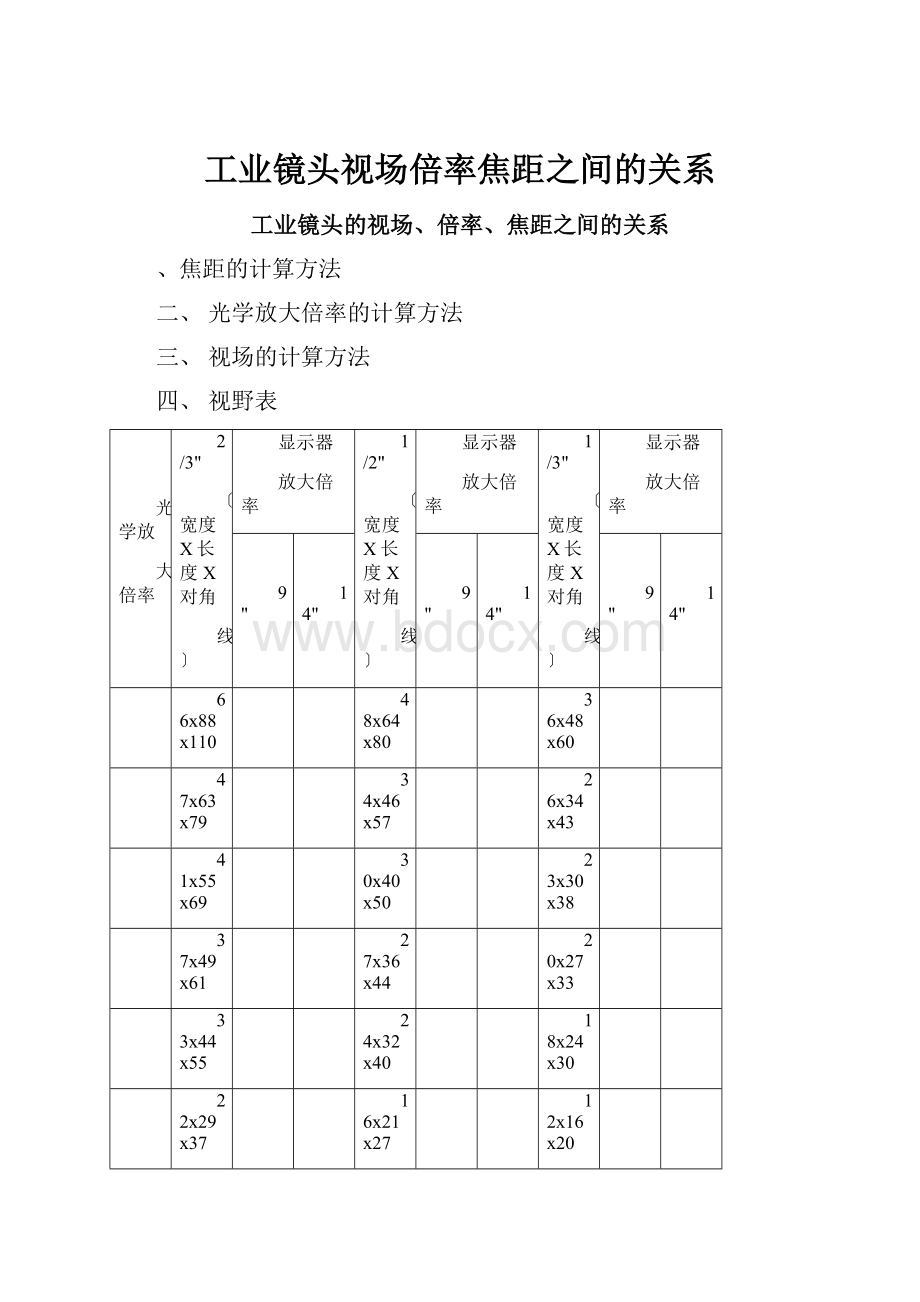
四、视野表
光学放
大倍率
2/3"
〔宽度X长度X对角
线〕
显示器
放大倍率
1/2"
〔宽度X长度X对角
线〕
显示器
放大倍率
1/3"
〔宽度X长度X对角
线〕
显示器
放大倍率
9"
14"
9"
14"
9"
14"
66x88x110
48x64x80
36x48x60
47x63x79
34x46x57
26x34x43
41x55x69
30x40x50
23x30x38
37x49x61
27x36x44
20x27x33
33x44x55
24x32x40
18x24x30
22x29x37
16x21x27
12x16x20
17x22x28
12x16x20
9x12x15
13x18x22
11x15x18
6x8x10
9x13x16
9x12x15
8x11x14
x1
x2
119
111
148
x3
134
114
178
113
100
156
133
208
x4
129
114
178
152
237
145
129
200
171
267
x5
105
162
143
223
191
297
x6
126
194
172
267
229
356
x7
147
226
200
312
267
415
x8
168
258
229
356
305
474
x9
189
291
257
401
343
534
x10
210
323
286
445
381
593
x11
231
355
315
490
419
652
x12
252
388
343
534
457
712
五、机器视觉中工业镜头的计算方式
1、WD物距工作距离〔WorkDistance,
WD。
2、FOV视场视野〔FieldofView,
FOV
3、DOV景深〔DepthofField〕。
4、Ho:
视野的高度
5、Hi:
摄像机有效成像面的高度〔Hi来代表传感器像面的大小〕6、PMAG镜头的放大倍数
7、f:
镜头的焦距
8LE:
镜头像平面的扩充距离
业界通用的标准就是1英吋CCD尺寸=长12.8mmX宽9.6mm=对角线为16mm之对应面积。
透过“勾股定理〞.可得出该三角之三边比例为
4:
3:
5;换句话说,我无须给你完整的面积参数,只要给你该三角形最长一边长度,你就可以透过简单的定理换算
回来。
而且面积对角线长度就是16除以那个分母。
有了固定单位的CCD尺寸就不难了解余下CCDSize比例定义了,例如:
)1/2"CCD的对角线就是1"的一半为8mm面积约为1/4;)1/4"CCD的对角线就是1"的1/4,即为4mm,面积约为1/16。
所以,得出这样的结论,就是
1/2.5inchCCD感光面积
六、相机和镜头选择技巧
1、相机的主要参数:
七、工业相机传感器尺寸大小:
感光面积SS(SensorSize)
1/4"X2.4mm);
1/3"X;
2、镜头的主要参数:
1/2"X;
2/3"X;
X9.6mm);
焦距FL(FocalLength)
最小物距Dmi(nminimumFocal
Distanc
3、其他参数:
视野FOV(FieldofView)
像素pixel
FOVmin=SS(Dmin/FL)
如:
SS=6.4mm,Dmin=8in,FL=12mm
pixel=640*480
那么:
FOVmin=6.4(8/12)
如果精度要求为,
结论:
可以到达设想的精度
机器视觉工业镜头的相关专业术语详解
机器视觉系统中,镜头相当于人的眼睛,其主要作用是将目标的光学图像聚焦在图像传感器(相机)的光敏面阵上。
视觉系统处理的所有图像信息均通过镜头得到,镜头的质量直接影响到视觉系统的整体性能。
下面对机器视觉工业镜头的相关专业术语做以详解。
、失真
可分为枕形失真和桶形失真,如下列图示:
、电视失真:
实际边长的歪曲形状与理想的形状的百分比算岀的值。
三、光学倍率
(Nacnjfication)
监观褂倍率;鞘IfitH对啣谭掙*.存WlfiiSl帰卜思示时萌倍挛ft構砂的尺寸与监衽石的尺寸牺不同〞便得佶率有所郢屈
四、监视放大
计算方法:
X遥学倍車=监视益倍車
例:
VS-MS件10x镜头1/2〞CCD照相机,14〞监视器上的成像
〞
的物体在监视器得到的是的成像
※有时根据TV监视器的扫描状态,以上的简易计算将有一些变化。
五、解析度
表示了所能见到了2点的间隔使用波长〔入〕/NA=解析度〔卩〕以上的计算方法理论上可以计算岀解析度,但不包括失真。
※使用波长为550nm
六、解像力
1mm中间可以看到黑白线的条数。
单位〔Ip〕/mm.
成像时再现物体外表的浓淡变化而使用的空间周波数和比照度。
八、工作距离〔WorkingDistance〕
镜头的镜筒到物体的距离
九、O/I〔ObjecttoImager〕
物像间距离即物体到像间的长度。
十、成像圈
成像尺寸©,要输入相机感应器尺寸。
十一、照相机Mount
C-mount:
1"diameterx32
CS-mount:
1"diameterx32
M72-Mount:
FB厂家各有不同
十二、视野〔FOV〕
视野指使用照相机以后看到的物体侧的范围
照相机有效区域的纵向长度〔V〕/光学倍率〔M=视野〔V〕
照相机有效区域的横向长度〔H〕/光学倍率〔M=视野〔H
*技术资料上的视野范围是指由光源及有效区域的一般数值计算出来的值。
照相机
视野
0/1
十三、景深
景深是指成像后物体的距离。
同样,照相机侧的范围称为焦点深度。
具体的景深的值多少略有不同十四、焦距〔f〕
f〔FocalLength〕光学系的后主点〔H2〕到焦点面的距离。
十五、FNO
镜头从无限远时,亮度表示的数值,值越小越亮。
FNO焦距/入射孔径或有効口径=f/D
十六、实效F
有限距离时镜头的明亮度。
实效F=〔1+光学倍率〕xF#
实效F=光学倍率/2NA
十七、NA〔NumericalAperture〕
物体侧的NA=sinuxn
成像侧的NA'=sinu'xn'
如下列图所示入社角度u,物体侧折射率n,成像侧的折射率’n'
NA=NA'x放大率
对于幅wo镜头*NAMA=1/2xkNANA>光学倍率
MA'加光学倍率
十八、边缘亮度
相对照度是指中央的照度与周边的照度的百分比。
十九、远心镜头
主光线与镜头光源平行的镜头。
有物体侧的远心,成像侧的远心,两侧的远心行头等方式。
二十、远心
Telecentricity是指物体的倍率误差。
倍率误差越小,Telecentricity越高。
Telecentricity有各种不同的用途,在镜头使用前,把握Telecentricity很重要。
远心镜头的主光线与镜头的
光轴平行,
Telecentricity不好,远心镜头的使用效果就不好;Telecentricity可以用下列图进行简单确实认。
二^一、景深〔DOF〕
景深〔DepthofField〕可以用以下的计算式计算出来:
景深=2xPermissibleCOCx实效F/光学倍率2=允许误差值/〔NAx光学倍率〕
〔使用的是的PermissibleCOC〕
〕=DOF
矶光学倍牽
二十二、通风盘及解析度
AiryDisk是指通过没有失真的镜头在将光集中一点时,实际上形成的是一个同心圆。
这个同心圆就叫做Airy
Disk。
AiryDisk的半径r可以通过以下的计算公式计算出来。
这个值称为解析度。
r=入/NAAiryDisk的半径
随波长改变而改变,波长越长,光越难集中于一点。
例:
的镜头波長卩
二十三、MTF及解析度
MTF(ModulationTransferFunction)是指物体外表的浓淡变化,成像侧也被再现出来。
表示镜头的成像性能,
mnm勺
成像再现物体的比照度的程度。
测试比照性能,用的是具有特定空间周波数的黑白间隔测试。
空间周波数是指1
距离浓淡变化的程度。
图1所示,黑白矩阵波,黑白的比照度为100%.这个对象被镜头摄影后,成像的比照度的变化被定量化。
根本上,
0%,不能进行颜色的区别
不管什么镜头,都会岀现比照度降低的情况。
最终比照度降低至
Inmx*Imlin
图2、3显示了物体侧与成像侧的空间周波数的变化。
横轴表示空间周波数,纵轴表示亮度。
物体侧与成像侧的对
比度由A、B计算出来。
MTF由A,B的比率计算出来。
解析度与MTF的关系:
解析度是指2点之间怎样被别离认识的间隔。
一般从解析度的值可以判断出镜头的好坏,但
是实际是MTF与解析度有很大的关系。
图4显示了两个不同镜头的MTF曲线。
镜头a解析度低但是具有高比照度。
镜
头b比照度低但是解析度高。
MTF
M<
M7F1g
 升级会员
升级会员 