连杆机构大作业报告.docx
《连杆机构大作业报告.docx》由会员分享,可在线阅读,更多相关《连杆机构大作业报告.docx(15页珍藏版)》请在冰豆网上搜索。
连杆机构大作业报告
机械原理大作业一
——平面六杆机构的分析
题目:
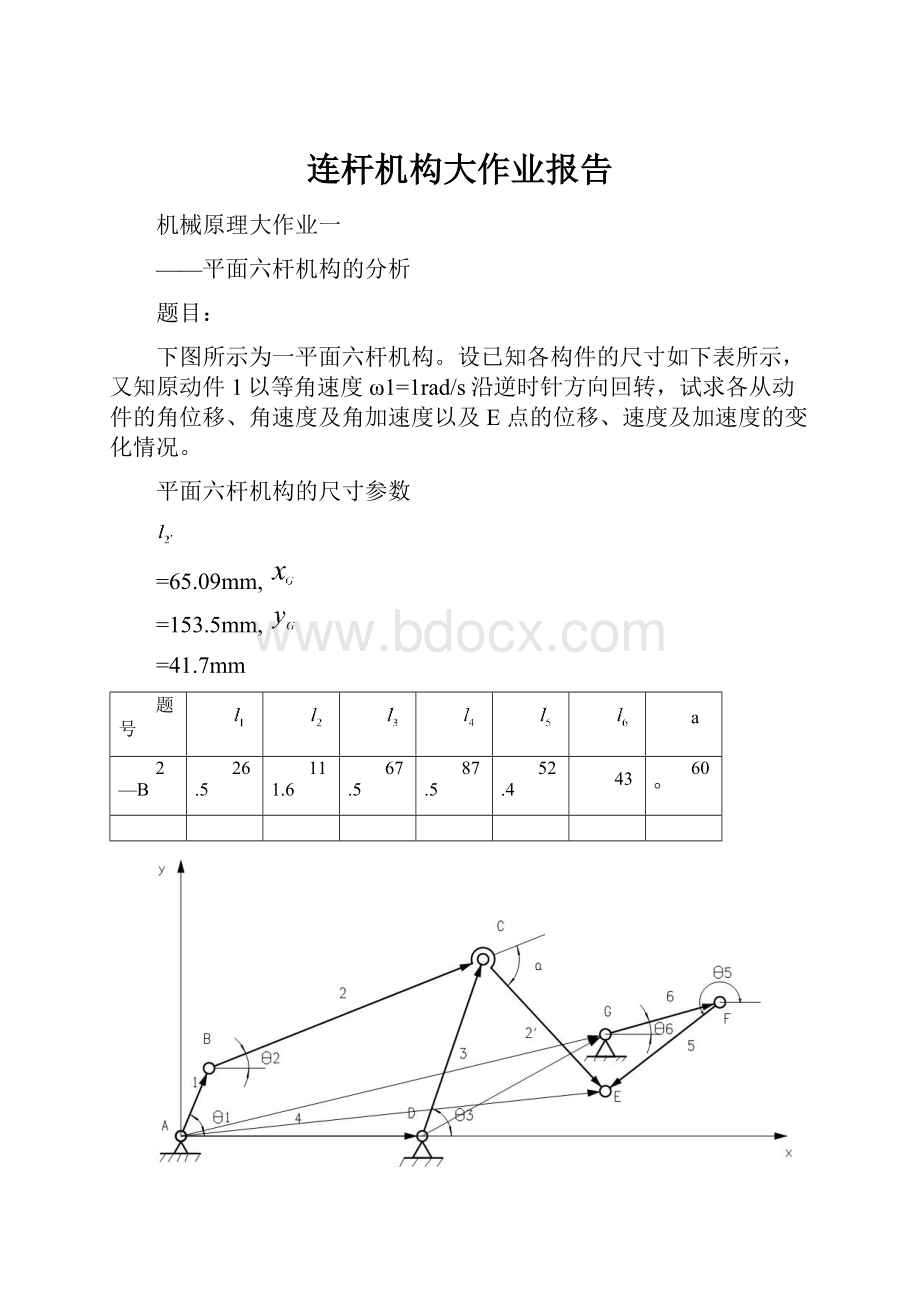
下图所示为一平面六杆机构。
设已知各构件的尺寸如下表所示,又知原动件1以等角速度ω1=1rad/s沿逆时针方向回转,试求各从动件的角位移、角速度及角加速度以及E点的位移、速度及加速度的变化情况。
平面六杆机构的尺寸参数
=65.09mm,
=153.5mm,
=41.7mm
题号
a
2—B
26.5
111.6
67.5
87.5
52.4
43
60°
图a)
1机构运动分析
如上图a)所示,建立直角坐标系。
建立三个封闭图形ABCDA、DCEFGD和DGFED,由此可得:
写成投影方程形式
可得E点位移:
分别将上式求一次、二次导数,写成矩阵形式,得到下面的速度和加速度方程:
E点的速度为:
E点的加速度为:
2matlab程序设计
2.1程序流程图
2.2源程序:
%创建函数myfun,函数fsolve通过它确定
、
、
、
。
functionf=myfun(x,y)
l1=26.5;l2=111.6;l3=67.5;l4=87.5;l5=52.4;l6=43;l21=65;xg=153.5;
yg=41.7;a=pi/3;
eq1=l1*sin(y)+l2*sin(x
(1))-l3*sin(x
(2));
eq2=l1*cos(y)+l2*cos(x
(1))-l3*cos(x
(2))-l4;
eq3=l3*sin(x
(2))+l21*sin(x
(1)-a)-yg-l6*sin(x(4))-l5*sin(x(3));
eq4=l3*cos(x
(2))+l21*cos(x
(1)-a)-xg+l4-l6*cos(x(4))-l5*cos(x(3));
f=[eq1;eq2;eq3;eq4];
主程序如下:
%求解过程
l1=26.5;l2=111.6;l3=67.5;l4=87.5;l5=52.4;l6=43;l21=65;xg=153.5;
yg=41.7;a=pi/3;%给定已知量
th1=[0:
1/18:
2]*pi;%曲柄输入角度th1从0到2*pi,步长为pi/18
th=zeros(length(th1),4);%建立一个N行4列的零矩阵,第一、二、三、四列%分别存放存放
、
、
、
v26=zeros(length(th1),4);
a26=zeros(length(th1),4);
options=optimset('display','off');
th0=[31.3,59.5,274.6,60.7];
th0=th0*pi/180;
form=1:
length(th1)%建立for循环,求解
、
、
、
及E点坐标与位移
th(m,:
)=fsolve('myfun',th0,options,th1(m));
th0=[th(m,1)th(m,2)th(m,3)th(m,4)];
xe(m)=xg+l6*cos(th(m,4))+l5*cos(th(m,3));%求E点横坐标
ye(m)=yg+l6*sin(th(m,4))+l5*sin(th(m,3));%求E点纵坐标
se(m)=sqrt(xe(m)^2+ye(m)^2);%求E点位移
end
forn=1:
length(th1)%建立for循环,求解各从动件和E点的速度
A=[l2*cos(th(n,1))-l3*cos(th(n,2))0000;
l2*sin(th(n,1))-l3*sin(th(n,2))0000;
l21*cos(th(n,1)-a)l3*cos(th(n,2))-l5*cos(th(n,3))-l6*cos(th(n,4))00;
l21*sin(th(n,1)-a)l3*sin(th(n,2))-l5*sin(th(n,3))-l6*sin(th(n,4))00;
00-l5*cos(th(n,3))-l6*cos(th(n,4))10;
00l5*sin(th(n,3))l6*sin(th(n,4))01];
b=[-l1*cos(th1(n))-l1*sin(th1(n))0000]';
v26(n,:
)=(inv(A)*b)';%求各从动件的速度
ve(n)=sqrt(v26(n,5)^2+v26(n,6)^2);%求E点速度
end
fori=1:
length(th1)%建立for循环,求解各从动件和E点的加速度
C=[l2*cos(th(i,1))-l3*cos(th(i,2))0000;
l2*sin(th(i,1))-l3*sin(th(i,2))0000;
l21*sin(th(i,1)-a)l3*sin(th(i,2))-l5*sin(th(i,3))-l6*sin(th(i,4))00;
l21*cos(th(i,1)-a)l3*cos(th(i,2))-l5*cos(th(i,3))-l6*cos(th(i,4))00;
00-l5*cos(th(i,3))-l6*cos(th(i,4))10;
00l5*sin(th(i,3))l6*sin(th(i,4))01];
E=[l2*sin(th(i,1))-l3*sin(th(i,2))0000;
-l2*cos(th(i,1))-l3*cos(th(i,2))0000;
l21*cos(th(i,1)-a)-l3*cos(th(i,2))l5*cos(th(i,3))l6*cos(th(i,4))00;
l21*sin(th(i,1)-a)l3*sin(th(i,2))-l5*sin(th(i,3))-l6*sin(th(i,4))00;
00-l5*sin(th(i,3))-l6*sin(th(i,4))00;
00-l5*cos(th(i,3))-l6*cos(th(i,4))00];
d=([v26(i,1)v26(i,2)v26(i,3)v26(i,4)].^2)';
g=[l1*sin(th1(i))l1*cos(th1(i))0000]';
a26(i,:
)=(inv(C)*(E*d-g))';%求从动件的加速度
ae(i)=sqrt(a26(i,5)^2+a26(i,6)^2);%求E点加速度
end
绘图程序:
th=th*180/pi;
th1=th1*180/pi;%将
、
、
、
、
转换成以度单位
%绘制各从动件位移图
plot(th1,th,'LineWidth',2.5);
xlabel('\theta1(度)');
ylabel('\theta2、\theta3、\theta5、\theta6(度)');
title('位置线图');
legend('\theta2','\theta3','\theta5','\theta6');
gridminor;
%绘制速度线图
plot(th1,v26(:
1),th1,v26(:
2),th1,v26(:
3),th1,v26(:
4),'LineWidth',2.5);
xlabel('\theta1(度)');
ylabel('\omega2、\omega3、\omega5、\omega6(rad/s)');
title('速度线图');
legend('\omega2','\omega3','\omega5','\omega6');
gridminor;
%绘制加速度线图
plot(th1,a26(:
1),th1,a26(:
2),th1,a26(:
3),th1,a26(:
4),'LineWidth',2.5);
xlabel('\theta1(度)');
ylabel('\alpha2、\alpha3、\alpha5、\alpha6(rad/s^2)');
title('加速度线图');
legend('\alpha2','\alpha3','\alpha5','\alpha6');
gridminor;
%绘制E点轨迹图形
plot(xe,ye,'LineWidth',2.5);
title('E点的轨迹');
xlabel('E点横坐标(mm)');
ylabel('E点纵坐标(mm)');
axis([1201801462]);
gridon;
%绘制E点速度图
plot(th1,v26(:
5),'-xb',th1,v26(:
6),'-*g',th1,ve,'-dr','LineWidth',2.5);
title('E点速度图');
xlabel('\theta1(度)');
ylabel('速度(mm/s)');
legend('E点速度x轴分量','E点速度y轴分量','E点速');
gridminor;
%绘制E点加速度图
plot(th1,aex,'-xb',th1,aey,'-*g',th1,ae,'-db');
title('E点加速度图');
xlabel('\theta1(度)');
ylabel('加速度(mm/s^2)');
legend('E点加速度x轴分量','E点加速度y轴分量','E点加速度');
gridminor;
2.3运行结果
2.3.1图形
1各从动件的位移线图:
2各从动件的速度线图:
3各从动件的加速度线图:
4E点轨迹图:
5E点速度图:
6E点加速度图:
2.3.2计算所得数据
角度数据
速度数据
加速度数据
 升级会员
升级会员 