直升机飞行控制实验.docx
《直升机飞行控制实验.docx》由会员分享,可在线阅读,更多相关《直升机飞行控制实验.docx(21页珍藏版)》请在冰豆网上搜索。
直升机飞行控制实验
直升机飞行控制实验2
030910304程娇娇030910301刘潇雅
030910305栾婷030910307沈星星
030910310李晓晓
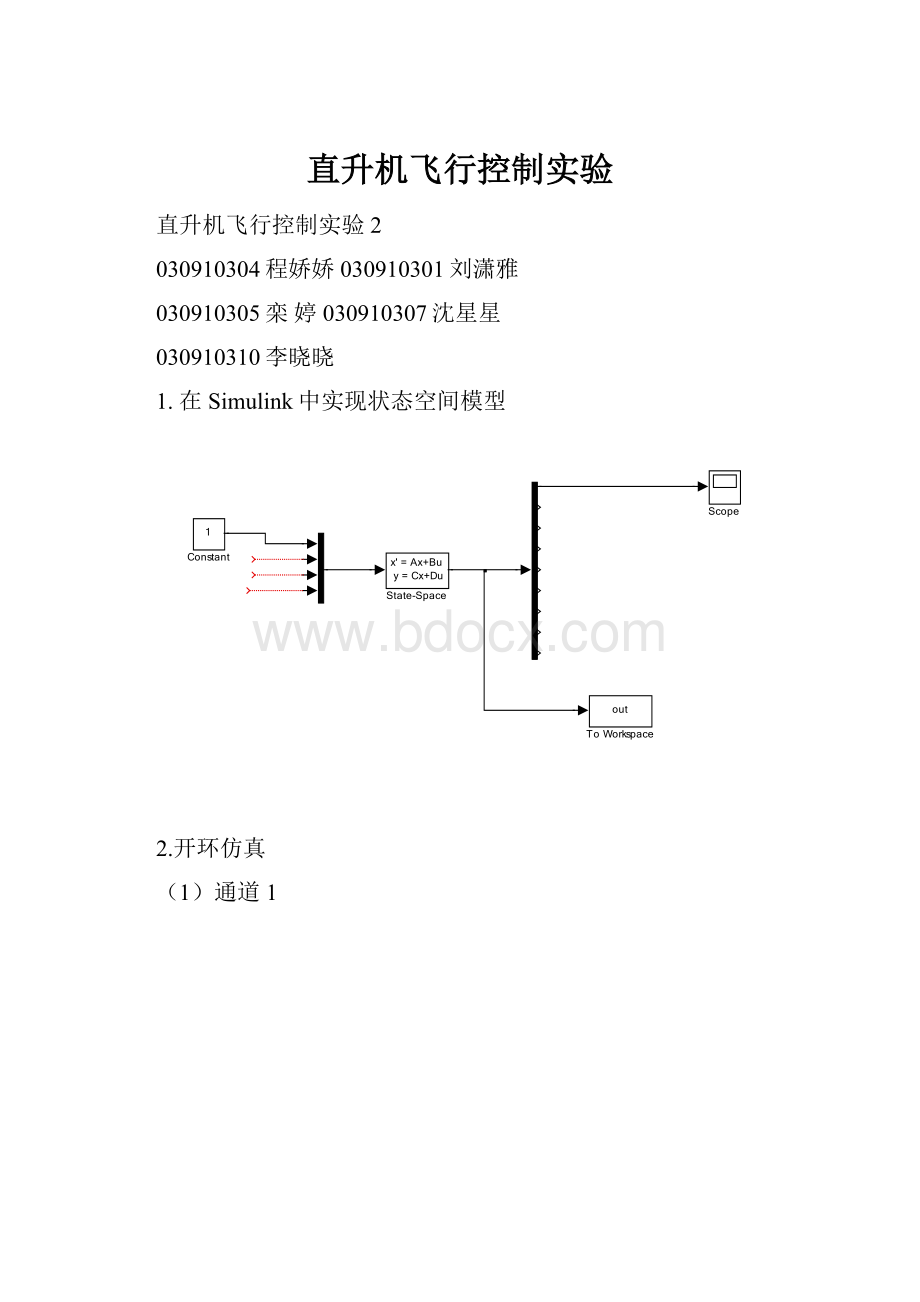
1.在Simulink中实现状态空间模型
2.开环仿真
(1)通道1
(2)通道2
(3)通道3
(4)通道4
2.分成四个通道,分别求传递函数
(1)通道1
A1=[-0.97570;10]
B1=[-5.5627;0]
C1=eye
(2);
D1=zeros(2,1)
sys=ss(A1,B1,C1,D1)
tf(sys)
传递函数:
Transferfunctionfrominputtooutput...
-5.563
#1:
----------
s+0.9757
-5.563
#2:
--------------
s^2+0.9757s
(2)通道2
A2=[2.97090.0002;10]
B2=[18.402;0]
C2=eye
(2);
D2=zeros(2,1)
sys=ss(A2,B2,C2,D2)
tf(sys)
传递函数:
Transferfunctionfrominputtooutput...
18.4s
#1:
----------------------
s^2-2.971s-0.0002
18.4
#2:
----------------------
s^2-2.971s-0.0002
(3)通道3
A3=[-0.5581]
B3=[-0.06181]
C3=eye
(1);
D3=zeros(1,1)
sys=ss(A3,B3,C3,D3)
tf(sys)
传递函数:
Transferfunction:
-0.06181
----------
s+0.5581
(4)通道4
A4=[0.09180;10]
B4=[8.4545;0]
C4=eye
(2);
D4=zeros(2,1)
sys=ss(A4,B4,C4,D4)
tf(sys)
传递函数
Transferfunctionfrominputtooutput...
8.454
#1:
----------
s-0.0918
8.454
#2:
--------------
s^2-0.0918s
3.用LTI工具箱设计参数
(1)通道1:
原阶跃响应:
校正后根轨迹:
校正后阶跃响应:
校正后闭环波特图:
(2)通道2
原阶跃响应:
校正后根轨迹:
校正后阶跃响应:
校正后闭环波特图:
(3)通道3
原阶跃响应:
校正后根轨迹:
校正后阶跃响应:
校正后闭环波特图:
(4)通道4
原阶跃响应:
校正后根轨迹:
校正后阶跃响应:
校正后闭环波特图:
4.用优化方法调参
Simulink仿真结构图:
maxDirectionalFirst-order
IterF-countf(x)constraintStep-sizederivativeoptimalityProcedure
01024.58
13021.220.061201infeasible
25011.360.26101infeasible
3709.054101Hessianmodified;infeasible
4900.9583101Hessianmodified;infeasible
51100.05314100.0145Hessianmodified
613-2.36208e-0210.037141-2.36e-0210.128Hessianmodified
7153.82895e-0160.00173513.83e-0163.51
81701.387e-0171-3.83e-0160.0218
Successfultermination.
Foundafeasibleoroptimalsolutionwithinthespecifiedtolerances.
Kp=
31.4255
Kph=
0.8064
Kps=
31.4257
Kq=
16.5874
Kr=
-1.3875e-017
Kth=
49.6978
Kw=
4.3469e-017
经过一次寻优后,第一二通道参数满足要求,因此,固定一二通道参数,对第三通道进行再次寻优如下:
maxDirectionalFirst-order
IterF-countf(x)constraintStep-sizederivativeoptimalityProcedure
0103.964
1303.6980.061201infeasible
2502.8560.26101Hessianmodifiedtwice;infeasible
3701.319100.547Hessianmodified
4900.5215100.00902
51100.09111100.27
61300.006808100.198
71500.0009177100.0429
Successfultermination.
Foundafeasibleoroptimalsolutionwithinthespecifiedtolerances.
Kph=
3.7749
Kr=
1.3985
Kw=
37.8876
经过二次寻优后,第一二三通道参数满足要求,因此,固定一二三通道参数,对第四通道进行再次寻优如下:
maxDirectionalFirst-order
IterF-countf(x)constraintStep-sizederivativeoptimalityProcedure
010239.9
130180.30.29101infeasible
25065.640.90901Hessianmodifiedtwice;infeasible
37019.24101Hessianmodifiedtwice;infeasible
4909.918101Hessianmodifiedtwice;infeasible
51108.684101infeasible
61308.593101infeasible
71508.582101infeasible
81708.581101Hessianmodified;infeasible
91908.581101Hessianmodified;infeasible
Couldnotfindasolutionthatsatisfiesallconstraints.
Relaxtheconstraintsorincreasetheconstrainttolerancetofindafeasiblesolution.
Kw=
58.5807
最终七个参数值为:
Kp=31.4255
Kps=31.4257
Kq=16.5874
Kth=49.6978
Kph=3.7749
Kr=1.3985
Kw=58.5807
四个通道示波器显示如下:
 升级会员
升级会员 