ABS控制器硬件的框图.docx
《ABS控制器硬件的框图.docx》由会员分享,可在线阅读,更多相关《ABS控制器硬件的框图.docx(13页珍藏版)》请在冰豆网上搜索。
ABS控制器硬件的框图
1 ABS控制器硬件的框图
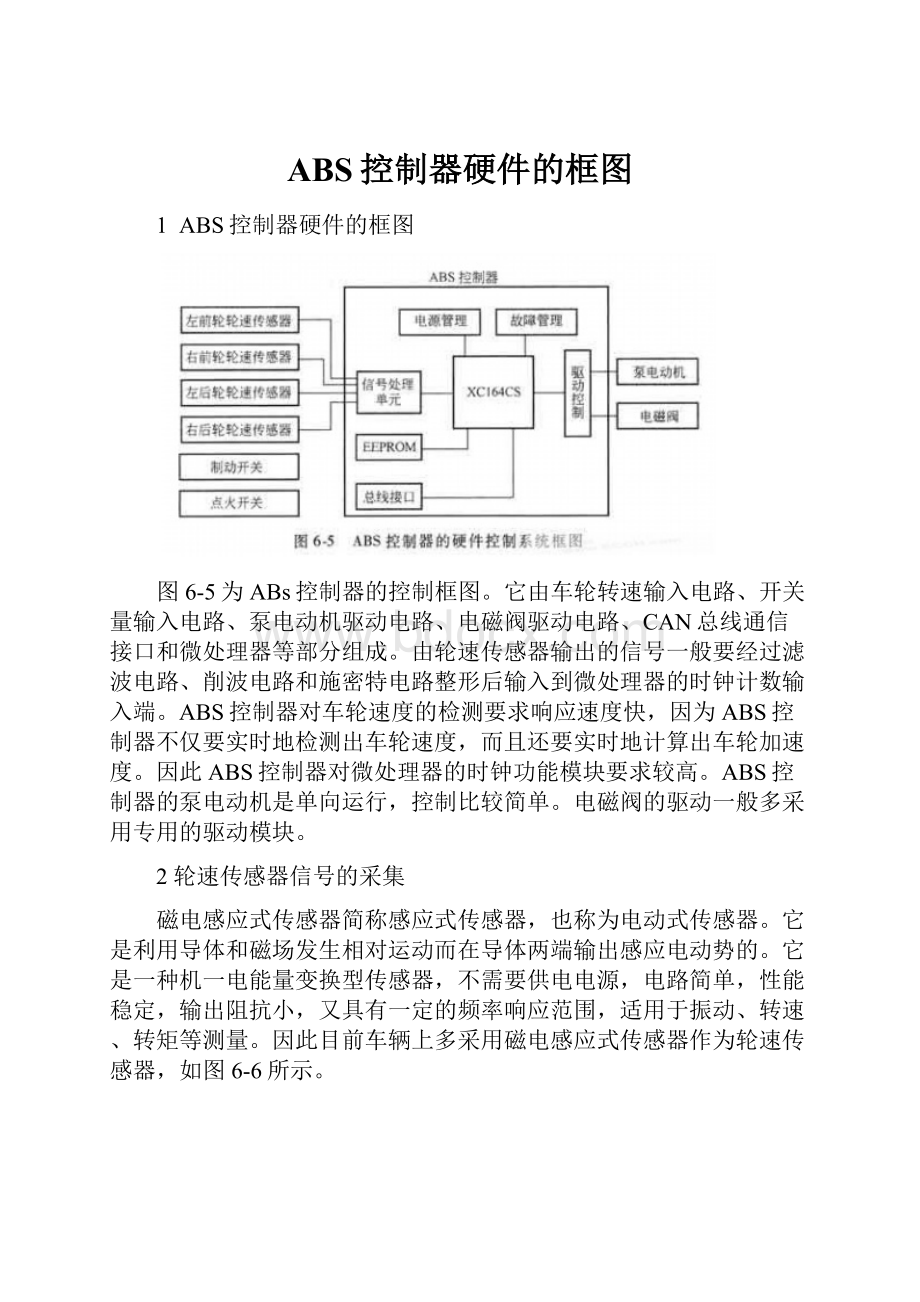
图6-5为ABs控制器的控制框图。
它由车轮转速输入电路、开关量输入电路、泵电动机驱动电路、电磁阀驱动电路、CAN总线通信接口和微处理器等部分组成。
由轮速传感器输出的信号一般要经过滤波电路、削波电路和施密特电路整形后输入到微处理器的时钟计数输入端。
ABS控制器对车轮速度的检测要求响应速度快,因为ABS控制器不仅要实时地检测出车轮速度,而且还要实时地计算出车轮加速度。
因此ABS控制器对微处理器的时钟功能模块要求较高。
ABS控制器的泵电动机是单向运行,控制比较简单。
电磁阀的驱动一般多采用专用的驱动模块。
2轮速传感器信号的采集
磁电感应式传感器简称感应式传感器,也称为电动式传感器。
它是利用导体和磁场发生相对运动而在导体两端输出感应电动势的。
它是一种机一电能量变换型传感器,不需要供电电源,电路简单,性能稳定,输出阻抗小,又具有一定的频率响应范围,适用于振动、转速、转矩等测量。
因此目前车辆上多采用磁电感应式传感器作为轮速传感器,如图6-6所示。
1.轮速传感器工作原理分析
磁电感应式传感器是以电磁感应原理作为基础的,根据这个原理,可将磁电感应式传感器分为恒定磁通式和变磁通式两类。
其中变磁通式传感器又称为变磁阻磁电感应式传感器或变气隙磁电感应式传感器,常用来测量旋转物体的角速度,因此车体上使用的是此种工作方式的磁电感应式传感器。
变磁通式传感器主要由线圈、永久磁铁等组成。
其工作原理如图6-7所示。
由电磁感应定律可知,当通过回路面积的磁通量发生变化时,在回路中就会产生感应电动势,其大小与磁通量的变化率成正比,即
在汽车行驶过程中,车轮带动齿盘旋转,齿盘上的齿和间隙交替通过永久磁铁的磁场,改变磁路的磁阻,整个回路的磁通量随之变化,在线圈中产生感应电动势。
感应电动势的幅值和频率与转轴的角速度成正比,因此通过对感应电动势的波形进行测量,即可计算获得车辆的轮速。
传感器输出的感应电动势波形如图6-8所示。
感应电动势的频率随轮速的变化而变化,由此推导出轮速计算公式为
以捷达车型左前轮为例,其齿盘齿数为43个,当控制轮毂速度为18km/h时,传感器输出信号为114Hz,幅值约为1V;当速度为236km/h时,传感器输出信号为1.5kHz,幅值约为6.8V。
2.传感器信号处理电路
(1)限幅电路
传感器输出的感应电动势波形幅值随着车轮转速的变化而变化,其幅值在变化过程中可能超过主CPU(主CPU采用Infineon公司的.XCl64CS)所能接受的TTL电平范围,因此输出的正弦信号不能直接输入主CPU,必须经过限幅电路。
限幅电路如图6-9所示。
当Ui≥4.7V时,U1输出为4.7V;当Ui<4.7v目.Ui>0V时,U输出为Ui;当Ui≤0V时,U1输出接近0V;保证U1始终小于4.7V,符合单片机接口电平要求。
(2)滤波电路
从轮速传感器输出的信号成分复杂,并非是纯净的正弦波信号,这主要是因为:
①齿轮加工所产生的毛刺、传感器安装及环境干扰等因素的影响;
②汽车在运行过程中路面平面度误差的影响,轮速检测装置也容易发生振动。
这将会在传感器输出信号上叠加一定的高频干扰,所以在信号输入单片机前还需要进行滤波处理。
图6-10为典型的低通滤波电路,用于滤除高频干扰信号。
其电压放大倍数Au和截止频率fd为
式中,当输入信号频率f远远小于fD时,放大倍数的模为1,信号可以无失真地通过;而当.厂远远大于fp时,放大倍数的模接近于0,高频信号会被滤除。
这里我们选定R2=10kΩ,C1=0.001μF,则fp=8kHz。
当最高车速为565km/h,传感器输出信号频率为3.58kHz,远远小于截止频率fp,因此传感器信号可以完全不失真地通过,而高频干扰信号将被滤除。
(3)整形电路
为了便于单片机的计数采集,采用施密特整形电路将传感器的输出的正弦波感应电动势信号转换为方波信号。
经过限幅、滤波、整形后波形如图6-1l所示。
这样经过一系列的处理,轮速传感器输出的信号便以一定频率的方波信号的形式输入到微处理器,微处理器根据采集到的一定时间内的脉冲个数来计算出车轮转速,进而推算出滑移率的大小。
3电源电路
电源电路是ABS控制器的重要组成部分,通常车载电源为12V,微处理器工作电压为5V,而具有内核单独供电的微处理器其内核电压一般为2.5V。
因此12V需要转变为两种幅值的电压。
电源电压转换电路如上图6-12所示。
TLE4275芯片是专门为车载电源设计的电源转换芯片,它的工作原理是利用比较器来实现电平转化的,输出电压为5.0V。
它最高输入电压为45V,这样当车载12V电源上串入一高幅值(大于12V,小于45V)电平干扰时,也不会对主CPU产生影响,并且它还具有短路保护、过电流保护、过热保护等功能。
图中,C14和C15为输入电容,用于作线性补偿;C17为输出电容,用于保持内部调节电路的稳定性;转换延时时间可以通过延时电容C16来确定。
LMlll7MPX-2.5芯片为线性电压调节器,它属于LMlll7系列,这一系列类似于LM317,但是LMlll7系列是既可以输出1.25~12.38V的可调电压,又有1.8、2.5、3.3V等固定输出电压值的芯片,如LMlll7MPX-2.5,利用这款芯片可以直接产生2.5V的电压,而不需外接调节电阻。
另外,此系列芯片的封装都非常小,有利于节省空间,缩小电路板的外形尺寸,适于在汽车电子产品中应用。
其中,钽电容C18用于提高输出电压的稳定性。
4CAN总线电路
CAN总线是汽车电子装置之间的重要通信手段,通过CAN可以实现信息共享。
当前生产中、高档微处理器大多都内嵌有CAN总线控制器,因此对于采用这种微处理器的电子装置,只需简单的驱动接口电路即可实现CAN总线接口功能。
图6-13为ABS控制器的CAN总线接口电路。
PCA82C25OT是CAN控制器与物理总线之间的接口,它是为汽车高速通信应用而设计的。
它可以提供对总线的差动发送和接收功能,可支持多达110个节点,并能以lMbit/s的传输速率工作于恶劣的电气环境下。
ABS控制车轮滑移率的执行机构是液压调节装置,微处理器向驱动泵电动机和电磁阀线圈的驱动电路发出指令,通过电磁阀和泵电动机的动作来实现对制动轮缸的压力调节。
压力调节装置的电磁阀以很高的频率工作,以确保在短时间内有效地对车轮滑移率进行控制。
ABS通常为液压式制动控制系统。
液压式制动控制系统主要由液压泵、储液器、电磁阀和调压缸等组成,制动压力调节器串联在制动主缸与轮缸之间,通过电磁阀直接地调节轮缸的制动压力,采用的调压方式为回流泵式调压方式。
其工作原理如图6-14所示。
此种方
式的调节装置采用两个两位两通电磁阀,通过两个电磁阀的开、合来实现一路制动压力的增加、保持和减小,在减压时,泵电动机将轮缸释放的制动液回送到储能器和制动主缸,制动液在主缸和轮缸之间交换,实现调节作用。
回流泵式调压系统具有以下一些特点:
1)(单轮)系统采用两个两位两通电磁阀取代传统的一个三位三通电磁阀,实现ABS的保压、减压和增压,工作可靠性更高。
2)当ABS工作,且轮缸处于保压状态时,轮缸的压力和来自主缸的压力在单向阀处平衡。
3)主缸和油泵之间串联单向阀,并联缓冲器,减缓了制动踏板的抖动,但仍保留了轻微的感觉。
回流泵式调压方式是ABS调压方式中比较新的技术,目前BOSCHABS5.3和TEVESMK20(桑塔纳2000时代超人装配)均采用了这种方式。
1.泵电动机控制电路
泵电动机在制动压力调节过程中,主要在减压时发挥作用,将轮缸释放的制动液回送至主缸。
因此泵电动机不需调速,也不涉及正反转,只需做单向旋转,因此驱动电路相对简单,只需高端驱动即可。
BTS6510是一款高端大电流功率开关芯片,它的内部框图如图6-15所示。
泵电动机所需驱动电流为8.4A,该芯片的驱动能力可以满足。
它适合于控制浪涌电流较大的电动机负荷,并且具有电源反接保护、限流、负荷电流反馈诊断以及过温、短路保护等功能,它的导通电阻RON只有60mΩ,因此芯片发热量低,散热相对容易。
而且它的输入控制逻辑电平为TTL电平,符合微处理器的接口标准。
因此,它是比较适合于ABS控制器的泵电动机驱动。
图6-16是泵电动机驱动原理电路。
2.电磁阀驱动控制电路
一个常开式增压阀和一个常闭式减压阀配对控制一路轮缸的压力。
图6-17为两位两通电磁阀的内部结构示意图,图6-18为电磁阀线圈的实物图。
1路压力控制管路上有2个电磁阀,4路共有8个电磁阀,图6-19为8路电磁阀控制方案。
由于电磁阀要实现的是开(通电流)、关(断电流)两种状态,因此总体方案是采用一片高端开关进行总体控制,选用8路低端开关进行分别控制。
为了减少控制器中器件的种类,对于功能、性能相近的器件可选用同一种型号,可选用BTS65lO作为8路电磁阀的高端驱动芯片。
MC33385为电磁阀低端驱动的专用芯片,适合于感性负荷。
图6-20为它的内部电路框图,它是一款保护功能较全面的4路低端开关,它可以与微控制器直接接口,并行控制独立的输出负荷,每一路可以承载3A的负荷电流,并且每一路的导通电阻RON只有250mΩ,该芯片还具有SPI的输出诊断,以及限流、过热保护功能。
图6-21为8路电磁阀控制原理电路,图中YV1~YV8分别代表8个电磁阀,用一片BTS6510作为高端驱动,两片MC33385做低端驱动。
电磁阀总开关和8个电磁阀分开关可直接与微处理器的开关量输出端相连。
电磁阀为感性负荷,假设初始状态下电磁阀无储能,电磁阀的电路模型如图6-22所示。
由式(6-14)可以看出,电磁阀电流按指数规律上升,所以存在延迟现象,而且电磁阀通电时,阀芯运动使得电磁线圈的电感增加,电流的上升率会随之降低。
图6-23和图6-24分别为电磁阀的驱动电压波形和电磁阀电流响应曲线的实测波形。
从试验结果可以看出,电磁阀电流上升到稳态值需要的时间约为80μs,因此驱动电磁阀的信号频率不能超过5kHz。
再考虑到电磁阀响应的机械延迟,驱动电磁阀信号的频率会更低。
图6-25为基于以上分析设计的ABS控制器电路板,图6-26为ABS控制器的8路电磁阀线圈的实物图。
 升级会员
升级会员 