汽车前悬架模型作业解析.docx
《汽车前悬架模型作业解析.docx》由会员分享,可在线阅读,更多相关《汽车前悬架模型作业解析.docx(12页珍藏版)》请在冰豆网上搜索。
汽车前悬架模型作业解析
东华大学2014----2015学年第一学期期末试题
踏实学习,弘扬正气;诚信做人,诚实考试;作弊可耻,后果自负。
课程名称虚拟样机技术及其应用使用专业机械工程及其自动化
班级机械1208班姓名赵开超学号120800811
试题得分
一
二
三
四
五
六
七
八
九
十
总分
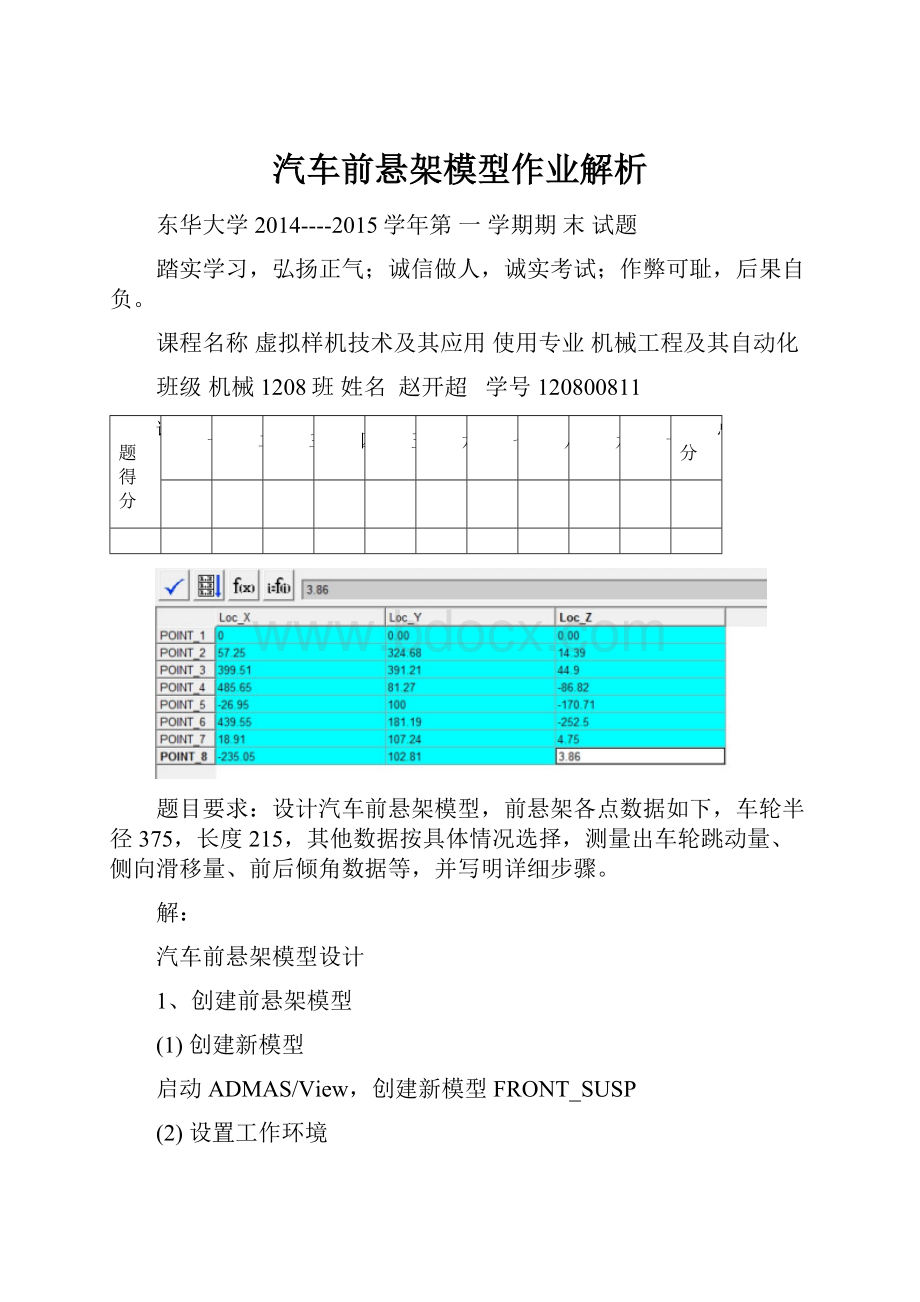
题目要求:
设计汽车前悬架模型,前悬架各点数据如下,车轮半径375,长度215,其他数据按具体情况选择,测量出车轮跳动量、侧向滑移量、前后倾角数据等,并写明详细步骤。
解:
汽车前悬架模型设计
1、创建前悬架模型
(1)创建新模型
启动ADMAS/View,创建新模型FRONT_SUSP
(2)设置工作环境
在菜单栏,选择设置(Settings)菜单中的单位(Units)命令,将模型单位设置为MMKS
选择设置(Settings)菜单中的工作网格(WorkingGrid)命令,将网格X方向和Y方向的大小分别设置为750和800,将网格间距设置为50.
(3)创建设计点
点击零件库的点(Point),选择AddtoGround和Don’tAttach,点击(PointTable)在窗口表格创建八个设计点,point1,point2,point3,point4,point5,point6,point7,point8
(4)创建主销Kingpin
点击零件库的圆柱体,选择”NewPart”,定义半径为20,选择设计点point1,point2,创建主销,将其重新命名为Kingpin.
(5)创建上横臂UCA
点击零件库的圆柱体,选择”NewPart”,定义半径为20,选择设计点point2,point3,创建上横臂,将其重新命名为UCA.
点击零件库的球体Sphere,选择”AddtoPart”,定义球体半径为25,选择上横臂为参考物体,球体的位置为设计点point2
(6)创建下横臂LCA
点击零件库的圆柱体,选择”NewPart”,定义半径为20,选择设计点point1,point4,创建下横臂,将其重新命名为LCA.
点击零件库的球体Sphere,选择”AddtoPart”,定义球体半径为25,选择下横臂为参考物体,球体的位置为设计点point1
(7)创建拉臂Pull_arm
点击零件库的圆柱体,选择”NewPart”,定义半径为15,选择设计点point7,point5,创建拉臂,将其重新命名为Pullarm.
(8)创建转向拉杆Tie_rod
点击零件库的圆柱体,选择”NewPart”,定义半径为15,选择设计点point5,point6,创建转向拉杆,将其重新命名为Tierod.
点击零件库的球体Sphere,选择”AddtoPart”,定义球体半径为20,选择转向拉杆为参考物体,球体的位置为设计点point5和point6.
(9)创建转向节Knuckle
点击零件库的圆柱体,选择”NewPart”,定义半径为20,选择设计点point8,point7,创建转向节,将其重新命名为Knuckle.
(10)创建车轮Wheel
点击零件库的圆柱体,选择”NewPart”,定义半径为375,定义圆柱体的长度为215;选择设计点point8,point7,创建车轮,将其重新命名为Wheel
点击零件库的倒圆Fillet,定义倒圆半径为50,选择车轮圆柱体的两条圆边,然后按鼠标右键,完成倒圆.
(11)创建测试平台.
点击零件库的点(Point),选择AddtoGround和Don’tAttach,在画图区点击右键,弹出Location窗口,输入设计点(-350,-320,-200)
点击零件库的长方体(Box),选择”NewPart”,将长方体的长度(Length)、高度(Heigth)和厚度(Depth)分别设置为500、45和400
选择上步操作创建的设计点,创建长方体.
点击零件库的圆柱体,选择”AddtoPart”,定义圆柱体的长度为350,半径为30,选择长方体”PART_1”为参考物体,选择长方体的质心位置为圆柱体的起始点,垂直向下创建圆柱体,它与长方体组合构成测试平台,将其重新命名为:
Test_Patch.
(12)创建弹簧
点击零件库的点(Point),选择AddtoPart和Don’tAttach,在上横臂(UCA)上创建设计点UCA.POINT_21(174.6,347.89,24.85)
点击零件库的点(Point),选择AddtoGround和Don’tAttach,在大地上(Ground)创建设计点ground.POINT_21(174.6,637.89,24.85)
点击力库中的弹簧(Spring),设置弹簧的刚度(K)和阻尼(C)分别为129.8和6000,如下图所示,选择设计点UCA.POINT_22和ground.POINT_22,创建弹簧
(13)创建球副
点击约束库的球副(SphericalJoint),设置球副的选项为”2Bod-1Loc”和”NormalToGrid”,选择上横臂(UCA)和主销(Kingpin)为参考物体,选择设计点Point_2为球副的位置点创建上横臂和主销之间的约束副.
点击约束库的球副(SphericalJoint),设置球副的选项为”2Bod-1Loc”和”NormalToGrid”,选择下横臂(LCA)和主销(Kingpin)为参考物体,选择设计点Point_1为球副的位置点创建下横臂和主销之间的约束副.
点击约束库的球副(SphericalJoint),设置球副的选项为”2Bod-1Loc”和”NormalToGrid”,选择转向拉杆(Tie_rod)和拉臂(Pull_arm)为参考物体,选择设计点Point_5为球副的位置点,创建转向拉杆和拉臂之间的约束副.
点击约束库的球副(SphericalJoint),设置球副的选项为”1Location”和”NormalToGrid”,选择设计点Point_6为球副的位置点,创建转向拉杆和大地之间的约束副.
(14)创建固定副
点击约束库的固定副(FixedJoint),设置固定副的选项为”2Bod-1Loc”和”NormalToGrid”,选择拉臂(Pull_arm)和主销(Kingpin)为参考物体,选择设计点Point_7为固定副的位置点,创建拉臂和主销之间的约束副.
点击约束库的固定副(FixedJoint),设置固定副的选项为”2Bod-1Loc”和”NormalToGrid”,选择转向节(Knuckle)和主销(Kingpin)为参考物体,选择设计点Point_7为固定副的位置点,创建转向节和主销之间的约束副.
点击约束库的固定副(FixedJoint),设置固定副的选项为”2Bod-1Loc”和”NormalToGrid”,选择车轮(Wheel)和转向节(Knuckle)为参考物体,选择设计点Point_7为固定副的位置点,创建车轮和转向节之间的约束副.
(15)创建旋转副
将视图方向设置为前视图,点击约束库的旋转副(RevoluteJoint),设置旋转副的选项为”1Location”和”NormalToGrid”,如图所示:
选择设计点Point_3为旋转副的位置点,放置旋转副后,直接在菜单栏的“Edit”菜单中选择“Modify”命令,修改刚刚创建的旋转副.,点击改变位置(ChangePosition),系统弹出移动目标对话框,在角度(Angle)栏中输入5,按指向左侧的肩头,将旋转副旋转5度,满足上横臂轴水平斜置角为-5度的要求.
将视图方向设置为前视图,点击约束库的旋转副(RevoluteJoint),设置旋转副的选项为”1Location”和”NormalToGrid”,选择设计点Point_4为旋转副的位置点,放置旋转副后,直接在菜单栏的“Edit”菜单中选择“Modify”命令,修改刚刚创建的旋转副.,点击改变位置(ChangePosition),系统弹出移动目标对话框,在角度(Angle)栏中输入10,按指向右侧的肩头,将旋转副旋转10度,满足下横臂轴水平斜置角为10度的要求.
(16)创建移动副
点击约束库的移动副(TranslationalJoint),设置移动副的选项为”1Location”和”PickFeature”,选择测试平台(Test_Patch)的质心的Marker为移动副的位置点,垂直向上(或向下)创建测试平台和大地之间的约束副.
(17)创建点-面约束副
点击约束库的点-面约束副(InplaneJointPrimitive),设置点-面约束副的选项为”2Bod-1Loc”和”PickGeometryFeature”,选择车轮(Wheel)和测试平台(Test_Patch)为参考物体,选择测试平台(Test_Patch)的质心的Marker为点-面约束副的位置点,垂直向上(或向下)创建测试平台和车论之间的约束副.
(18)保存模型
选择”File”菜单中的”savedatabaseas”命令,将前悬架模型保存在工作目
录中.
2.测试前悬架模型
(1)添加驱动
点击驱动库的直线驱动(TranslationJointMotion)按钮,选择测试平台和大地的移动副约束,创建直线驱动(TRANS_MOTION_1).再在“EDIT”菜单中选择”Modify”,可以修改直线驱动,在添加驱动对话窗的”F(time)=”栏中,输入驱动表达示:
100*sin(360d*time),它表示车轮的上跳和下跳行程均为100mm.
可以在主工具箱中选择仿真按钮进行仿真,观察前悬架模型的运动仿真.
(2)测量主销内倾角
选择Build-Measure-Function-New,创建新的测量函数.
在函数编辑器对话框中的测量名称栏输入:
Kingpin_Inclination,单位选择:
Angle,借助函数编辑器提供的基本函数,编辑主销内倾角的函数表达式如下.运行仿真,测量主销内倾角变化曲线
ATAN(DX(.FRONT_SUSP.Kingpin.MAR_2,.FRONT_SUSP.Kingpin.MAR1)/DY(.FRONT_SUSP.Kingpin.MAR_2,.FRONT_SUSP.Kingpin.MAR_1))
系统生成主销内倾角变化的测量曲线,设置终止时间为1,工作步为100,进行仿真。
(3)测量主销后倾角
选择Build-Measure-Function-New,创建新的测量函数.
在函数编辑器对话框中的测量名称栏输入:
Caster_Angle,单位选择:
Angle,借助函数编辑器提供的基本函数,编辑主销内倾角的函数表达式.运行仿真,测量主销内倾角变化曲线
ATAN(DZ(.FRONT_SUSP.Kingpin.MAR_2,.FRONT_SUSP.Kingpin.MAR_1)/DY(.FRONT_SUSP.Kingpin.MAR_2,.FRONT_SUSP.Kingpin.MAR_1))
系统生成主销后倾角变化的测量曲线,设置终止时间为1,工作步为100,进行仿真。
(4)测量前轮外倾角
选择Build-Measure-Function-New,创建新的测量函数.
在函数编辑器对话框中的测量名称栏输入:
Camber_Angle,单位选择:
Angle,借助函数编辑器提供的基本函数,编辑主销内倾角的函数表达式.运行仿真,测量前轮外倾角变化曲线
ATAN(DY(.FRONT_SUSP.Knuckle.MAR_1,FRONT_SUSP.Knuckle.MAR_2)/DX(.FRONT_SUSP.Knuckle.MAR_1,.FRONT_SUSP.Knuckle.MAR_2))
系统生成前轮外倾角变化的测量曲线,设置终止时间为1,工作步为100,进行仿真。
(5)测量前轮前束角
选择Build-Measure-Function-New,创建新的测量函数.
在函数编辑器对话框中的测量名称栏输入:
Toe_Angle,单位选择:
Angle,借助函数编辑器提供的基本函数,编辑前轮前束角的函数表达式.运行仿真,测量前轮前束角变化曲线
ATAN(DZ(.FRONT_SUSP.Knuckle.MAR_1,.FRONT_SUSP.Knuckle.MAR_2)/DX(.FRONT_SUSP.Knuckle.MAR_1,.FRONT_SUSP.Knuckle.MAR_2))
系统生成前轮前束角变化的测量曲线,设置终止时间为1,工作步为100,进行仿真。
(6)测量车轮接地点侧向滑移量
在车轮上创建Marker,修改它的位置为(-150,-270,0);然后,在大地上创建Marker,它的位置也为(-150,-270,0);
选择Build-Measure-Function-New,创建新的测量函数.
在函数编辑器对话框中的测量名称栏输入:
Sideways_Displacement,单位选择:
Length,借助函数编辑器提供的基本函数,编辑测量车轮接地点侧向滑移量的函数表达式.运行仿真,测量车轮接地点侧向滑移量曲线
DX(.FRONT_SUSP.Wheel.MAR_5,.FRONT_SUSP.ground.MAR_6)
其中,“tomarker”选择车轮在(-150,-270,0)处的marker;“frommarker”选择大地在(-150,-270,0)处的marker;
系统生成车轮接地点侧向滑移量的测量曲线,设置终止时间为1,工作步为100,进行仿真。
(7)测量车轮跳动量
选择Build-Measure-Function-New,创建新的测量函数.
在函数编辑器对话框中的测量名称栏输入:
Wheel_Travel,单位选择:
Length,借助函数编辑器提供的基本函数,编辑车轮跳动量的函数表达式.运行仿真,测量车轮跳动量变化曲线
DY(.FRONT_SUSP.Wheel.MAR_5,.FRONT_SUSP.ground.MAR_6)
在函数编辑器中的函数表达式如上所示。
其中,“tomarker”选择车轮在(-150,-270,0)处的Marker.”frommarker”选择大地在(-150,-270,0)处的
marker。
按函数编辑器的“OK”,创建车轮跳动量的测量函数。
同时,系统生成车轮跳动量的测量曲线,设置终止时间为1,工作步为100,进行仿真
(8)创建前悬架特性曲线
在菜单栏中选择”Review”菜单中的”PlottingWindows”命令,系统进入定制曲线窗口.
选择曲线的数据来源为Measure,在”IndependentAxis”栏中,点击Data,选择主销内倾角Kingpin_Inclination的测量曲线为定制曲线的X轴.
选择车轮跳动量Wheel_Travel为定制曲线的Y轴,按”AddCurves”,创建主销内倾角相对于车轮跳动的变化曲线.
主销后倾角、前轮外倾角、前轮前束角、车轮接地点侧向滑移量相对于车轮跳动的变化曲线类似操作.
选择曲线的数据来源为Measure,在”IndependentAxis”栏中,点击Data,选择主销后倾角Caster_Angle的测量曲线为定制曲线的X轴.
选择车轮跳动量Wheel_Travel为定制曲线的Y轴,选择OneCurvePerPlot,表示每幅图只有一条曲线,按”AddCurves”,创建主销后倾角相对于车轮跳动的变化曲线。
在”IndependentAxis”栏中,点击Data,选择前轮外倾角Camber_Angle的测量曲线为定制曲线的X轴.
选择车轮跳动量Wheel_Travel为定制曲线的Y轴,选择OneCurvePerPlot,按”AddCurves”,创建前轮外倾角相对于车轮跳动的变化曲线。
在”IndependentAxis”栏中,点击Data,选择前轮前束角Toe_Angle的测量曲线为定制曲线的X轴.
选择车轮跳动量Wheel_Travel为定制曲线的Y轴,选择OneCurvePerPlot,按”AddCurves”,创建前轮前束角相对于车轮跳动的变化曲线。
在”IndependentAxis”栏中,点击Data,选择前轮接地点侧向滑移量Sideways_Displacement的测量曲线为定制曲线的X轴.
选择车轮跳动量Wheel_Travel为定制曲线的Y轴,选择OneCurvePerPlot,按”AddCurves”,创建前轮接地点侧向滑移量相对于车轮跳动的变化曲线。
(9)保存模型
 升级会员
升级会员 