PID步进电机的调速.docx
《PID步进电机的调速.docx》由会员分享,可在线阅读,更多相关《PID步进电机的调速.docx(13页珍藏版)》请在冰豆网上搜索。
PID步进电机的调速
精品文档
一、PID控制系统
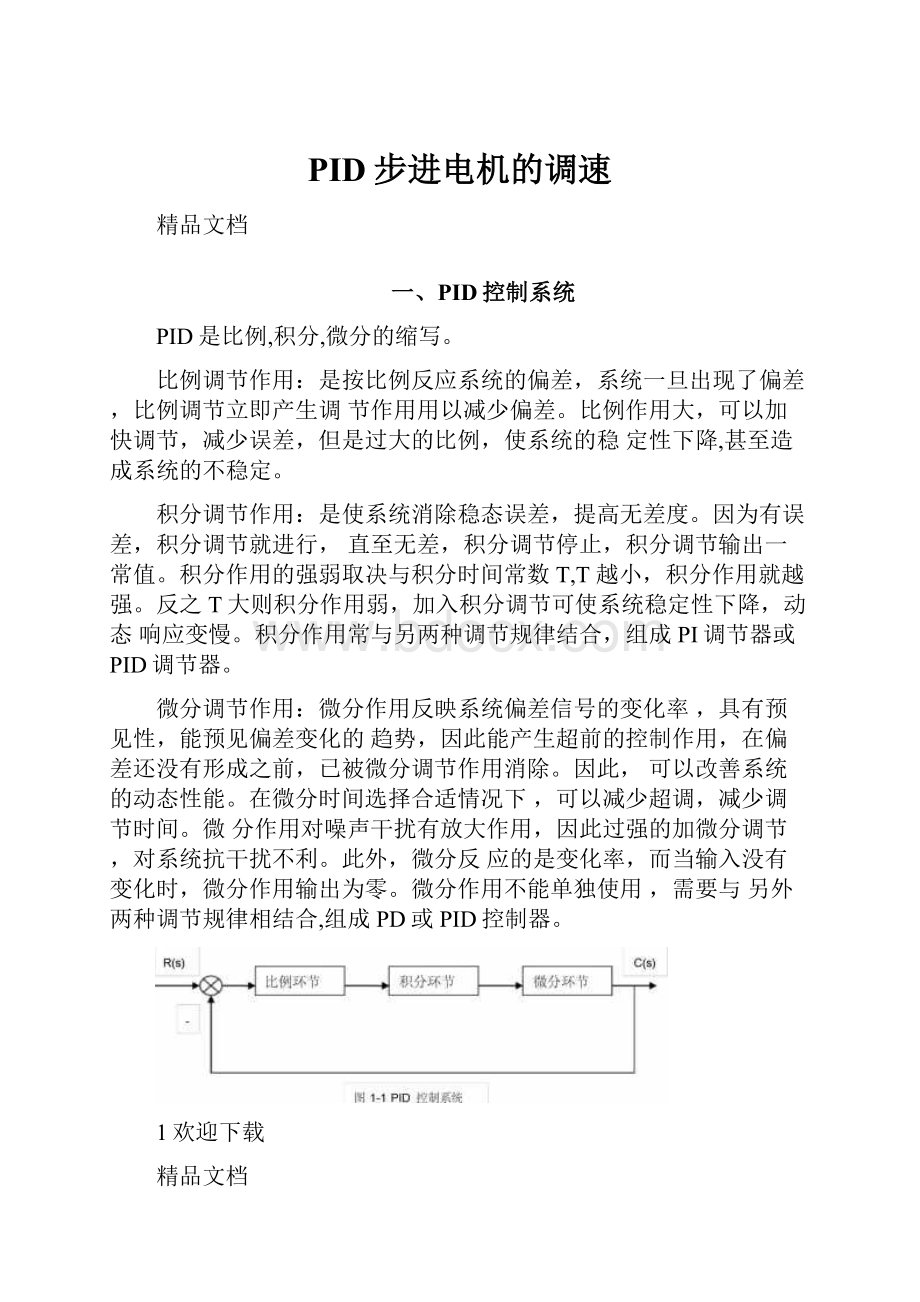
PID是比例,积分,微分的缩写。
比例调节作用:
是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用:
是使系统消除稳态误差,提高无差度。
因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。
积分作用的强弱取决与积分时间常数T,T越小,积分作用就越强。
反之T大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。
积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分调节作用:
微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。
因此,可以改善系统的动态性能。
在微分时间选择合适情况下,可以减少超调,减少调节时间。
微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。
此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。
微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
1欢迎下载
精品文档
二阶系统数学模型
二阶系统方框图如下图所示
R(s)
/■
E(s)
2
・⑷n
C(s)
*
)»
S(S+2匚国n)
图2-2标准形式二阶系统结构图
二阶系统闭环传递函数的标准形式
2
(2-1)
-'n
S2•2—nS「n2
得出自然频率(或无阻尼振荡频率)
阻尼比
(2-2)
1
2\TmK
(2-3)
令式(2-1)的分母多项式为零,得二阶系统的特征方程
S2•2—n「J=0
(2-4)
其两个根(闭环极点)为
Si、2八化-「J2-1
(2-5)
显然,二阶系统的时间响应取决于■和「n这两个参数。
应当指出对于结构和功用不同
的二阶系统,•和*的物理含意是不同的
2欢迎下载
精品文档
三、PID调速系统数学模型
PID控制系统是一种线性控制系统。
在连续控制系统中,用输出量c(t)和给定量r(t)
之间的误差时间函数的比例、积分、微分线性组合构成控制量u(t)。
图3-1所示为PID调
速控制系统的框图
图3-1控制框图
本文通过采用PID控制系统控制步进电机转速以使其达到应有的机械性能,并且实现对其的最优控制。
如图3-2所示为PID调速系统数学模型
图3-2PID调速系统数学模型
图3-3PID调速系统结构图
由图3-3得
3欢迎下载
精品文档
所以
(3-3)
(3-4)
利用微分方程与传递函数的通性得系统传递函数
步进电机是一种将电脉冲转化为角位移的执行机构,可以通过控制脉冲
制它,以三相反应式步进电机为例推导得:
用d/dt置换后得系统微分方程
GS=G1S・G2SKpTdKm
S(T"K)
又因为该系统为单位反馈系统,所以有
TiS2KsKp’KmTjCs二Kp’KmTRs
用d/dt置换后得系统微分方程
利用微分方程与传递函数的通性得系统的传递函数
(3-9)
乙2Lda2/2J
222
日1(s)s2+Ds/J+Zr2L1ia2/2J
其中J、Zr分别为转子转动惯量及齿数;ia为A相电流;L为绕组的电感;D为电动机的黏滞阻尼系数。
取L(H)=0.01002,Zr=40,J(kg•m2)
4欢迎下载
精品文档
=1.08,»3.1。
期望角位移输出B=1.5,取ia=1.0,这样得到步进电机的
闭环传递函数为:
(3-10)
7.4224
汀(s)—
s2+2.87S+7.4224
自然频率(或无阻尼振荡频率)
阻尼比
特征方程
(3-13)
2
D(s)=s2.87s7.4224二0
选用的变压器为带触头的线性调压器,即调压器的传递函数为常数。
步进电机的输出角度通过机械传动转换为触头的直线位移。
通过触头位置的改变来改变匝数比,从而改变输出电压,起到调压的目的,进而改变电机转速。
5欢迎下载
精品文档
四、系统的稳定性判断
稳定是控制系统能够运行的首要条件,因此只有当动态过程收敛时,研究系统的动态性能才有意义。
由系统特征方程(3-9)列劳思表如下:
表4-1劳思表
S2
1
7.4224
S1
2.87
S0
7.4224
按照劳斯稳定判据,由特征方程所表征的线性系统稳定的充分且心要条件是:
劳思表中第一列各值为正。
由表中各数据可以看出,表中第一列数据均为正值,因此判断该系统稳定。
6欢迎下载
精品文档
五、系统的性能指标
5.1系统的动态性能
通常在阶跃函数作用下,测定或计算系统的动态性能。
一般认为,阶跃输入对系统来说是最严峻的工作状态。
如果系统在阶跃函数作用下的动态性能满足要求,那么系统在其它形式的函数作用下,其动态性能也是令人满意的。
5.2系统的稳态性能
稳态误差是描述系统稳态性能的一种性能指标,通常在阶跃函数、斜坡函数或加速度函数作用下进行测定或计算。
若时间趋于无穷时,系统的输出量不等于输入量或输入量的确定函数,则系统存在稳态误差。
稳态误差是系统控制精度或搞扰动能力的和种度量。
由系统的闭环传递函数可求得系统的开环传递函数为
1、在阶跃信号
(5-7)
r(t)二R*1(t)
作用下的稳态误差系数
于是得其稳态误差
KppmGG)二0
(5-8)
(5-9)
2、在斜坡信号
作用下的稳态误差系数
于是得其稳态误差
r(t)=Rt
Kv二limsG(s)二2.586
^0
R
Kv
R
2.586
7欢迎下载
(5-10)
(5-11)
(5-12)
精品文档
3、在加速度信号
作用下的稳态误差系数
于是得其稳态误差
2
r(t)二Rt/2
2
Ka二limsG(s)=:
:
sT
Ka
=0
8欢迎下载
(5-13)
(5-14)
(5-15)
精品文档
六、系统的校正设计
系统的开环传递函数为
按照要求相角裕度_30,先验证系统是否符合要求,如果不符合要求对系统进行校
(6-5)
(6-6)
c二2.63rad
相角裕度
亍=180一90一arctgc二20.8:
:
:
30
此二阶系统的幅值裕度为
h-:
dB(6-7)
由于:
:
30,不满足题给要求,因此需采用如下串联超前校正:
最大超前角
分度系数
1sin
(6-9)
「打1”5
9欢迎下载
精品文档
时间常数
T=0.56
丄-1.79,—=1.08,aT=0.924
TaT
(6-11)
(6-12)
超前网络的传递函数
图6-1系统幅频特性曲线
已校正系统的开环传递函数为
(6-14)
7.4224X(1+0.924s)Gc(s)G(s):
s(s2.87)(10.56s)
其对数幅频特性曲线如图3-1中L"(■)所示。
显然,已校正系统c=1.4rad,算得校
正系统(;)=35.54,而由;:
m=14.2可求已校正系统的相角裕度
'=m(')=49.7430(6-15)
已校正系统幅值裕度仍为:
=dB,因为其对数相频特性不可能与有限值与-180。
线相交
此时,全部性能指标均已满足。
10欢迎下载
精品文档
采用PID控制系统对传递函数为式(3-2)所示的二阶系统执行机构进行仿真。
从仿真曲线(图7-1)我们可以看到,采用PID调速系统控制时,速度很快就趋于平稳,波动较小,控制平稳,满足了测控系统的要求。
A(w)
0输入信号波形w
图7-1仿真曲线
11欢迎下载
精品文档
心得体会
经过一个星期的努力,最后终于顺利完成了本次设计任务。
本次设计是在考试后一周开始的,也是对我们刚刚学过的知识的一个巩固的过程。
这次设计,我首先查找了大量的资料,选定了本次设计的题目;之后,我通过去图书馆查阅大量的文献资料,并且对这些资料进行了总结和分析,对这个题目的内容有了一个大概的了解,又经过多方面的调研,比如上网查找大量资料等,万事俱备后,就开始了本次设计。
设计过程中用到了自动控制原理中的相关内容,如PID控制的原理及其传递函数的性能指标和系统的串联校正,还有幅频特性曲线的画法,还有很多关于自动控制方面的知识。
可以说通过本次设计使我对自动控制原理这门课又有了一些新的认识,本来认为很厚的一本书,现在一想内容也不是很多,而且也很有成就感。
这几天做设计虽然辛苦了点,但是自己也学到了不少东西,至少我现在事理文件的能力有所提高了,还学会了一些画图软件和仿真软件及很多计算机方面的技能,可以说是获益匪浅。
我希望以后能多有这样的机会做课程设计,使我在熟悉课本知识的同时提高工作效率,培养自己独立设计能力。
培养自己成为一个全面发展的应用型人才,为建设有中国特色社会主义事业贡献力量!
12欢迎下载
精品文档
参考文献
[1]胡寿松主编.2001.自动控制原理.第4版.北京:
国防工业出版社
[2]何关钰著.1982.线性控制系统理论.沈阳:
辽宁人民出版社
[3]汪国梁主编.1987.电机学.北京:
机械工业出版社
[4]吴麒主编.1990.自动控制系统.北京:
清华大学出版社
[5]孙虎章主编.1984.自动控制原理.北京:
中央广播电视大学出版社
13欢迎下载
精品文档
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等等
打造全网一站式需求
14欢迎下载
 升级会员
升级会员 