机器人标定模型的建立_精品文档.doc
《机器人标定模型的建立_精品文档.doc》由会员分享,可在线阅读,更多相关《机器人标定模型的建立_精品文档.doc(9页珍藏版)》请在冰豆网上搜索。
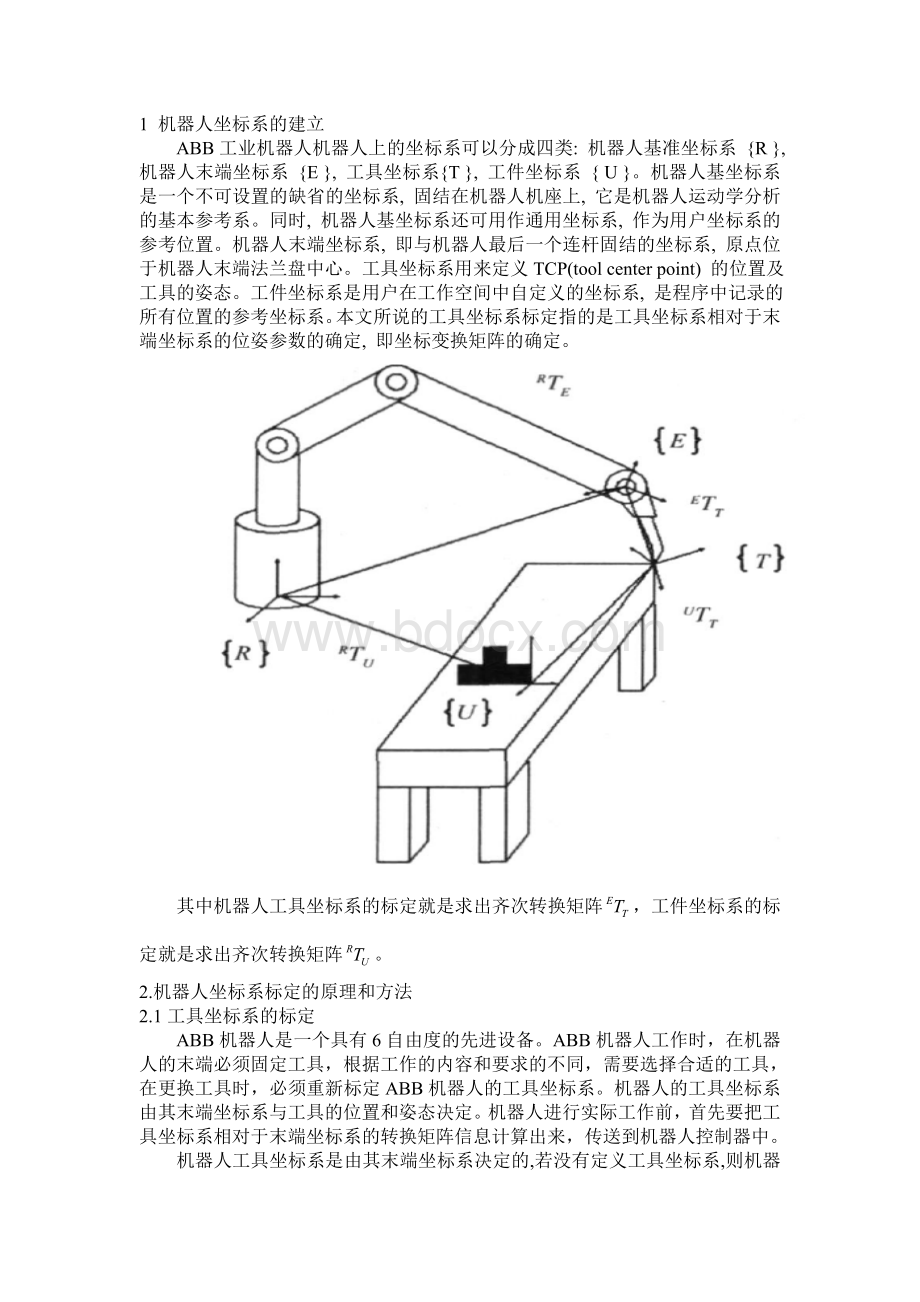
1机器人坐标系的建立
ABB工业机器人机器人上的坐标系可以分成四类:
机器人基准坐标系{R},机器人末端坐标系{E},工具坐标系{T},工件坐标系{U}。
机器人基坐标系是一个不可设置的缺省的坐标系,固结在机器人机座上,它是机器人运动学分析的基本参考系。
同时,机器人基坐标系还可用作通用坐标系,作为用户坐标系的参考位置。
机器人末端坐标系,即与机器人最后一个连杆固结的坐标系,原点位于机器人末端法兰盘中心。
工具坐标系用来定义TCP(toolcenterpoint)的位置及工具的姿态。
工件坐标系是用户在工作空间中自定义的坐标系,是程序中记录的所有位置的参考坐标系。
本文所说的工具坐标系标定指的是工具坐标系相对于末端坐标系的位姿参数的确定,即坐标变换矩阵的确定。
其中机器人工具坐标系的标定就是求出齐次转换矩阵,工件坐标系的标定就是求出齐次转换矩阵。
2.机器人坐标系标定的原理和方法
2.1工具坐标系的标定
ABB机器人是一个具有6自由度的先进设备。
ABB机器人工作时,在机器人的末端必须固定工具,根据工作的内容和要求的不同,需要选择合适的工具,在更换工具时,必须重新标定ABB机器人的工具坐标系。
机器人的工具坐标系由其末端坐标系与工具的位置和姿态决定。
机器人进行实际工作前,首先要把工具坐标系相对于末端坐标系的转换矩阵信息计算出来,传送到机器人控制器中。
机器人工具坐标系是由其末端坐标系决定的,若没有定义工具坐标系,则机器人末端坐标系被默认为工具坐标系.在机器人进行实际工作前,首先要将工具坐标系相对于机器人末端坐标系之间的转换矩阵信息输送到机器人控制柜中.机器人工具坐标系的标定就是指精确地确定出工具坐标系相对于机器人末端坐标系之间的位置和姿态。
2.1.1坐标系在固定参考坐标系中的表示
如果一个坐标系不在固定的参考坐标系的原点,那么该坐标系的原点相对于参考坐标系的位置也必须表示出来,为此,在该坐标系原点与参考坐标系原点之间做一个向量来表示该坐标系的位置(),这个向量由相对于参考坐标系3个分量来表示,这样,这个坐标系就可以由3个表示放心的单位向量以及第四个位置向量来表示。
由上式可知,一个坐标系的位置和姿态可以用一个4x4的矩阵来表示。
前3个向量表示该坐标系3个单位向量的方向向量,第四个向量表示该坐标原点相对于参考坐标系的位置。
所有机器人工具坐标系的标定包括两个部分:
确定工具坐标系原点相对于机器人末端坐标系的位置偏移和确定工具坐标系相对于机器人末端坐标系的旋转量。
2.1.2确定工具坐标系原点相对于机器人末端坐标系的位置偏移
机器人末端坐标系{E}相对于机器人基坐标系{R}的转换关系RTE,可由机器人的正运动学方程得到.机器人工具坐标系{T}相对于机器人基坐标系{R}的转换关系为RTT.机器人工具坐标系{T}相对于机器人末端坐标系{E}的转换关系ETT为所求,其各个参数是固定不变的,各坐标系转换关系如下:
其中:
ABB机器人六点法标定工具坐标系取前四点时,工具末端必须只想一个固定点,而机器人必须以不同的姿态使机器人的末端处于不同的位置,其中第四点以竖直方向接近于固定点。
这四个点确定一个球体,并且可以计算其球心,工具的末端与球心重合。
设这四个点的机器人末端姿态为:
其中,可以通过机器人正运动学方程得到相关的数据,式中各个参量分别为:
上式中,分别表示工具坐标系的空间坐标。
本文采用RPY角法描述工具的空间姿态,RPY角法是手部相对于参考坐标系轴做3次连续转动获得规定姿态的描述方法,其中分别表示焊枪相对参考坐标系连续转动获得的姿态,代表绕轴的偏转角,代表绕轴的偏转角,代表绕轴的偏转角。
球心的齐次坐标为,由以下方程组(3)可以求出球心的坐标值:
其中;为球体的半径,设工具末端在机器人末端坐标系的位置,由可知
其中可取4点中任意一点。
的值可以有上式得到。
2.2.2确定工具坐标系相对于机器人末端坐标系的旋转量
工具坐标系相对于机器人末端坐标系旋转量的确定方法如下:
取第四点确定机器人工具坐标系,取第五、第六点如图,第四点到第五点的向量方向为的方向,第四点到第六点的方向向量为的方向,和保持垂直,在这部分在这部分操作过
程中机器人末端姿态和焊枪的姿态没有变化,只是位置发生改变.
设图中3点的位姿为:
其中,可以通过机器人正运动学方程得到相关数据.把上节计算得到的工具坐标系原点相对于机器人末端坐标系的位置偏移和第四、第五、第六3点的位姿,代入式可以得到机器人末端在第四、第五、第六3点时工具末端在机器人基坐标下的位置.设工具末端在这3点的位置为,为,为,(式中表示叉乘,下同),,把单位正交化得,把工具坐标系原点相对于机器人末端坐标系的位置偏移、第四点的位姿(设为第四点的位置)和带人公式得:
机器人工具坐标系相对于末端坐标系的旋转量可由上式求出。
2.3工具坐标系的标定过程
l首先在机器人工作范围内找到一个非常精确的固定点作为参考点。
l在工具上确定一个参考点(最好是工具的中心点TCP)
l通过手动操纵机器人的方法,去移动工具上的参考使用工具的参考点以四种不同的机器人姿态尽可能与固定点刚好碰上。
(其中第四点垂直于固定点,第五点是工具参考点从固定点向将要设定为TCP的X方向移动,第六点是工具参考点从固定点向将要设定为TCP的Z方向移动)。
l机器人就可以通过这六个位置点的位置数据计算就得工具坐标系的数据,然后TCP数据就保存在机器人的工具坐标系程序中。
TCP取点数量的区别:
l4点法,不改变tool0的坐标方向
l5点法,改变tool0的Z方向
l6点法,改变tool0的X和Z方向(在焊接中应用最为常用)
l前三个点的姿态相差尽量大一些,这样有利于TCP精度的提高。
3工件坐标系的标定
工件坐标系的标定是工件参数标定的一部分.当工件不同或者工件摆放位置和姿态发生变化,以及为了更好地表达操作任务,一般需要重新建立工件坐标
系并进行标定,因而在实际生产中经常需要进行工件坐标系的标定.
3.1各坐标系关系的建立
工件坐标系对应工件:
它定义工件相对于大地坐标系(或者其他坐标系)的位置,机器人可以拥有若干工件坐标系,或者表示不同工件,或者表示同意工件在不同位置的若干副本。
对机器人进行编程时就是在工件坐标系中创建目标和路径。
这样做带来很多优点:
l重新定位工作站中的工件时,只需要更改工件坐标系的位置,所有路径将即刻随之更新。
l允许操作以外轴或传送导轨移动的工件,因为整个工件可两天其路径一起移动。
工件坐标系建立在工件侧面,坐标系原点定位在侧面中心,坐标系固接在工件上。
设{}相对于{}的齐次转换矩阵为,该矩阵随着机器人末端的移动而改变,由机器人正运动学和机器人逆运动学求解得到,各项数值可由机器人控制柜读到{}相对于{}的齐次转换矩阵不随机器人的运动而改变,其各项数值由上一节工具参数标定已得到。
由于工件位置确定以后,工件坐标系{}相对于{}的齐次转换矩阵也就确定,故其不随机器人的运动而变化。
{}相对于{}的齐次转换矩阵为,其随机器人焊枪的移动而改变。
3.2工件坐标系的标定计算
某点在机器人基坐标系下的齐次坐标为,在工件坐标系下的齐次坐标为,有下式:
其中,
由式得到一般的方程组:
ABB机器人三点法标定工件坐标系的方法如下:
第一点取工件侧面中心为原点,取第二、第三两点如图所示,第一点到第二点的向量方向为工件坐标系的方向,第一点到第三点的向量方向为工件坐标的方向,和保持垂直.3点在机器人基坐标系下的坐标分别为,在工件坐标系下坐标分别为。
令=0,=0,=0,可以得第一点的位置为,第二点的位置为,第三点的位置为;
令=,=0,=0,其中为模型方向最大值,可以得到:
解方程组可以得到:
,
令,其中为轴正方向最大值,为轴正方向的最大值,可以得到:
得到:
上式中,,,为中间变量,由以上计算过程即可求出工件坐标系相对于机器人基准坐标系的转换矩阵。
为了得到较高的标定精度,多次标定后得到多组标定值,最后通过最小二乘法确定最终的标定结果。
 升级会员
升级会员 