完整word版直升机桨毂结构.docx
《完整word版直升机桨毂结构.docx》由会员分享,可在线阅读,更多相关《完整word版直升机桨毂结构.docx(15页珍藏版)》请在冰豆网上搜索。
完整word版直升机桨毂结构
直升机结构(桨毂)
旋翼系统由桨叶和桨毂组成。
旋翼形式是由桨毅形式决定的。
它随着材料、工艺和旋翼理论的发展而发展。
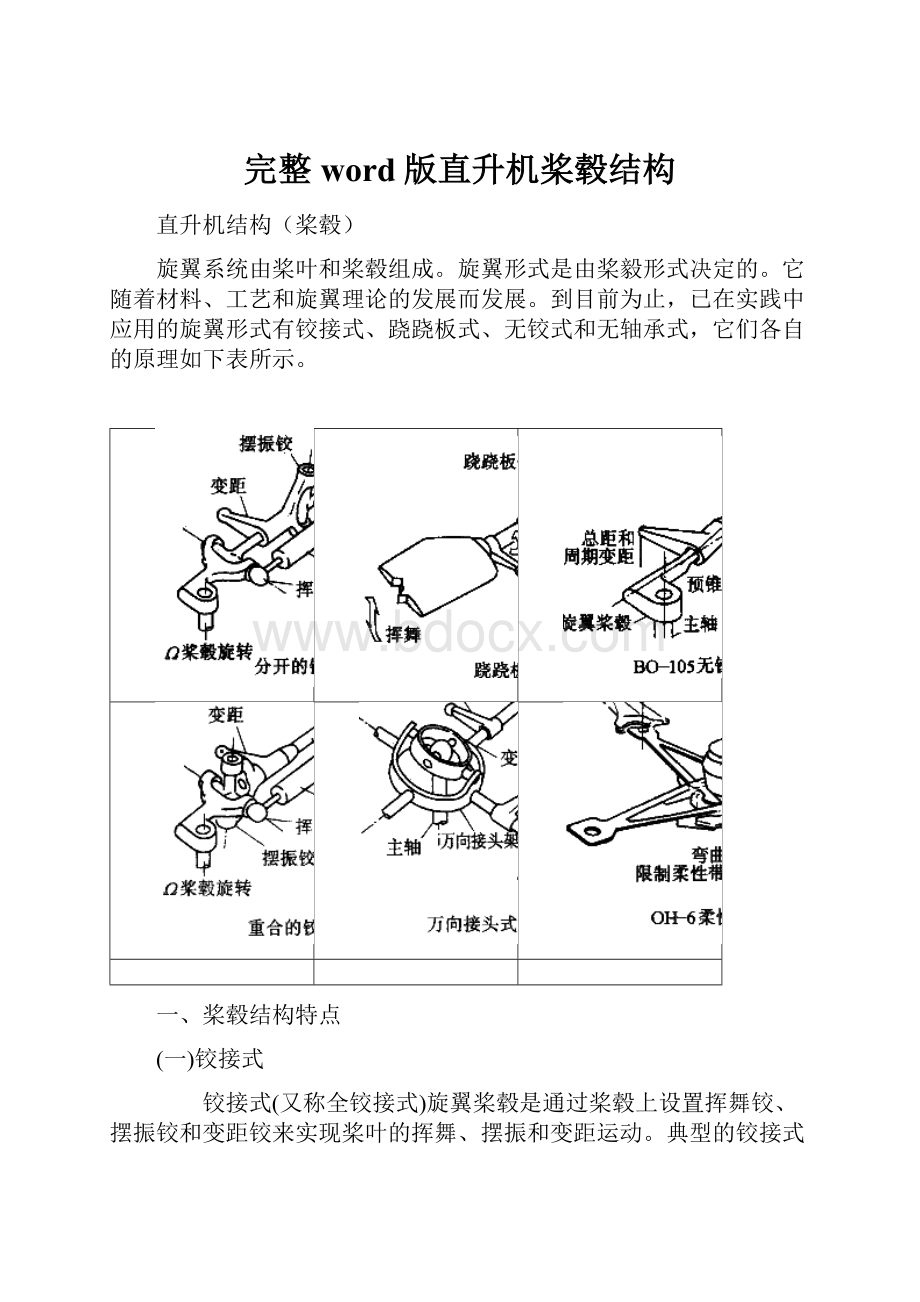
到目前为止,已在实践中应用的旋翼形式有铰接式、跷跷板式、无铰式和无轴承式,它们各自的原理如下表所示。
一、桨毂结构特点
(一)铰接式
铰接式(又称全铰接式)旋翼桨毂是通过桨毂上设置挥舞铰、摆振铰和变距铰来实现桨叶的挥舞、摆振和变距运动。
典型的铰接式桨毂铰的布置顺序(从里向外)是由挥舞铰、摆振铰到变距铰,如图2.2—1所示。
也有挥舞铰与摆振铰重合的。
在轴向铰中除了用推力轴承来负担离心力并实现变距运动外,另一种流行的方式是利用弹性元件拉扭杆来执行这个功能,如图2.2—2所示。
这样在旋翼进行变距操纵时必须克服拉扭杆的弹性及扭短,为了减小操纵力,就必须使拉扭杆有足够低的扭转刚度。
铰接式桨毂构造复杂,维护检修的工作量大,疲劳寿命低。
因此在直升机的发展中一直在努力改善这种情况。
在20世纪60年代后期开始发展的层压弹性体轴承(橡胶轴承)也是解决这个问题的一个较好的方案,现已实际应用。
层压弹性体轴承也可称为核胶轴承,以图2.2—3b中径向轴承为例,这是由每两层薄橡胶层中间由金属片隔开并硫化在一起。
内外因的相对转动是通过橡胶层的剪切变形来实现的,而径向负荷则要由橡胶的受压来传递。
图中还表示了层压弹性轴承的一些基本形式,并标示了它允许的相对运动方向和受力方向。
图2.2—4为桨毂一个支管的构造。
轴承组件的主要部分是一个球面弹性体轴承,桨叶的挥舞及摆振运动全部通过这个轴承来实现。
此外靠近内端有一个层压推力铀承,桨叶变距运动的85%通过这个轴承的扭转变形来实现,其余15%则由球面轴承来实现。
这种形式的桨毂是用一组层压弹性体轴承组件来实现挥舞铰、摆振铰、变距铰三铰的功能,这样使构造大大简化,零件数量也大大减少。
同时由于不需要润滑及密封,维护检修的工作量亦少很多。
(二)桨毂减摆器
铰接式旋翼在摆振铰上都带有桨毂减摆器,简称为减摆器,为桨叶绕摆振铰的摆振运动提供阻尼。
减摆器对于防止出现“地面共振”,保证其有足够的稳定性裕度是必要的。
此外,对于装备涡轮轴发动机的直升机,发动机、传动系统及旋翼整个系统的扭转振动,由于存在着燃油控制系统而形成一个闭合回路,也存在着操纵响应的稳定性问题。
对于这样一种自激振动,减摆器对集合型的摆振运动提供的阻尼也是有利的,即可以保证所要求的稳定性裕度。
1.液压减摆器
主要是用油液流动速度的损失来产生压力差从而起到阻尼作用。
图2.2—5为这种减摆器的原理,图2.2—6表示了这种减楼器在桨毂上可能的安装情况。
当桨叶绕垂直铰来回摆动时,减摆器壳体与活塞杆之间产生往复运动。
这时,充满壳体内的油液也就要以高速度流进壳体与活塞之间的缝隙(或者是活塞上的节流孔),活塞的左右就产生了压力差,从而形成减摆力矩。
液压减摆器的减摆力矩比较稳定,它不像摩擦减摆器那样需经常检查及调整。
但如果油液泄漏使空气进入,则会显著地改变减摆器的特性。
因此,除了在减摆器上带密封装置外,往往还需要有油液补偿装置。
2.粘弹减摆器
70年代开始出现了用粘弹性材料硅橡胶制成的粘弹减摆器。
这种减摆器是利用粘弹性材料变形时很大的内阻尼来提供所要求的减振阻尼,其构造原理见图2.2—7。
减摆器由当中的金屑扳及其两边的两块外部金属板构成。
内部金属板及两块外部金屑板之间各有一层硅橡胶,金属板与橡胶硫化粘结在一起,内部金属板一端与铀向铰轴颈相连,而外部金属板则与中间连接件相连接。
桨叶绕垂直铰摆动时,由硅橡胶层的往复剪切变形使减摆器产生往复轴向变形。
粘弹材料变形时将产生内摩擦,内摩擦力在相位上滞后变形90’,这些变形要消耗能量,从而起到了阻尼的作用。
粘弹减摆器突出的优点是结构简单,除了目视检查外,不需要维护。
这种减摆器不仅提供了阻尼也对桨叶摆振运动附加了刚度,提高了桨叶摆振固有频率。
在低温下硅橡胶会硬化,这是设计时应注意的问题。
(三)万向接头式及跷跷板式
40年代中期,在全铰式旋翼得到广泛应用的同时,贝尔公司发展了万向接头式旋翼,并将其成功地应用在总重量一吨级的轻型直升机Bell47上。
50年代中期又把万向接头式进一步发展成统统板式,研制了总重量达4吨多的中型直升机UH—l和9吨级的BeH214直升机。
虽然这两种族翼形式除了贝尔公司外很少采用,但仅仅Bell47型及UH—l系列直升机产量就很大,应用也很广泛。
图2.2—8所示为Bell47型直升机万向接头式旋翼桨毂的构造,图2。
2—9为其原理图。
两片桨叶通过各自的轴向铰和桨毂壳体互相连接,而桨毂壳体又通过万向接头与旋翼轴相连。
挥舞运动通过万向接头B—B铰实现。
改变总距是通过轴向铰实现的,而周期变距是通过万向接头绕。
a--a铰的转动实现。
跷跷板式旋翼和万向接头式旋翼的主要区别是桨毂壳体只通过一个水平铰与旋翼轴相连,这种桨毂构造比万向接头式简单一些,但是周期变距也是通过变距铰来实现。
一般变距铰采用拉扭杆来负担离心力。
这两种桨毂形式与铰接式相比,其优点是桨毂构造简单,去绰了摆振铰、减摆器,两片桨叶共同的挥舞铰不负担离心力而只传递拉力及旋翼力矩,轴承负荷比较小,没有“地面共振”问题。
但是,这种旋翼操纵功效和角速度阻尼比较小,为了加大角速度阻尼,这种形式的旋翼都要带机械增稳装置——稳定杆,没有办法改善操纵功效,对于机动性要求较高的直升机,上述缺点就很突出。
(四)无铰式
从40年代到60年代,铰接式旋翼是主要的旋翼形式。
在长期的应用中这种形式发展得比较成熟,经验也比较多。
但是,由于结构复杂、维护工作量大、操纵功效及角速度阻尼小等固有的缺点,这种形式不够理想。
因此,从50年代起,除了简化铰接式旋冀结构外,还开始了无铰式旋翼的研究工作。
经过长期的理论与试验研究,印年代末及70年代初无铰式旋翼进入了实用阶段。
带有无铰式旋翼的宜升机如德国的BO—105,英国的“山猫”(WG—13)等,它们取得了成功并投入了批生产。
与铰接式旋冀相比,无铰式旋翼的结构的力学特性与飞行的力学特性联系更为密切。
这种形式的旋翼会产生一些新的动力稳定性问题,本节着重介绍无铰旋冀的结构特点。
(1)BO—105型直升机的无铰式旋翼如图2.2—10所示为BO—105型直升机无较式旋翼,它的桨毂尺寸比较紧凑,刚度也很大,变距铰在桨叶根部与桨毂相连,桨叶挥舞和摆振运动是通过玻璃钢桨叶根部的弯曲变形来实现的。
这种桨叶是屑于摆振柔软型旋翼桨叶,摆振频率n,1,0.65,旋翼结构锥度角为2.5。
(2)“山猫”直升机的无铰式旋翼图2.2—ll所示为山猫直升机桨毂结构,它与BO—105直,升机桨毂相比刚度要小,桨叶的挥舞运动由和桨轴相联的挥舞柔性件弯曲变形实现,而摆振运动则是由变距铰壳体的延伸段的弯曲变形实现。
这种族翼是采用了消除耦合的设计,它的摆振频率。
wvl=0.43,也
是摆振柔软的旋翼。
(3)星形柔性桨毂
图2.2—12所示为法国航宇公司的SA—365N“海豚”II型直升机的星形柔性旋翼桨毂构造,它主要是由中央星形件、球面层压弹性体轴承、粘弹减摆器(也称频率匹配器)、夹板和自润滑关节轴承等组成。
中央星形件通过螺栓直接固定在旋翼轴接合盘上,球关节轴承套装在星形件四个支臂的外端,而轴承座通过粘弹减摆器与夹板相连接。
上、下夹板在外端连接桨叶,而内端通过固定在星形件孔内的球面层压弹性体轴承与星形件相连接。
星形件上伸出的四个支臂在挥舞方面是柔性的。
1.整流罩2.自润滑关节轴承3.粘弹减摆器4.夹板5.球面弹性轴承6.垫片7.中央星形件8.销子
桨叶上的离心力通过夹板传给弹性轴承,弹性体轴承以受压方式将离心力传到星形件上(图2.2-13)。
由变距拉杆经摇臂作用到夹板上的扭转力矩使弹性轴承产生扭转变形,夹板带动桨叶一起绕弹性体轴承球中心与关节轴承中心的连线转动,从而实现桨叶的变距运动,如图2.2—14所示。
桨叶挥舞运动时,由于星形件柔性臂在挥舞方向是柔性的,因此,当桨叶连同夹板组件一起绕弹性
体轴承中心上、下挥舞时,弹性体轴承本身绕球心产生剪切变形,而星形件柔性臂产生上下弯曲变形(见图2.2—15)。
由于星形件柔性臂在摆振方向的刚度要比在挥舞方向大得多,因此当桨叶连同夹板组件一起绕弹性体轴承的中心前后摆动时,弹性体轴承本身产生剪切变形,而在摆振方向刚度比星形件柔性臂低得多的粘弹减摆器的硅橡胶层也将产生剪切变形,这样既提供了阻尼又附加了弹性约束(见图2.2—16)。
由以上所述可以看出,这种形式的桨毂实际上就成了在位接处有弹性约束的铰接式旋翼。
其挥舞一阶固有频率wV1=1.04,相应的当量水平铰外移量约为4.9%只,接近铰接式旋翼的上限;摆振一阶固有频率。
wV1=0.62,接近于摆振柔软的无铰式旋翼的下限。
所以,星形柔性旋翼其结构动力学特性介于铰接式与无铰式之间。
采用这种结构动力学布局的出发点,可能是为了能在操纵功效及角速度阻尼方面比铰接式有所改善。
同无铰式旋翼一样,这种形式的旋翼也带有结构锥度角,以消除旋翼拉力所引起的不变的弯距。
“海脉”旋翼的结构锥度角为4.5度,直升机的桨叶还带有2度的后掠角,这主要是为了改善在巡航状态时桨毂的受力。
(五)无轴承式旋翼
上面所说的无铰式旋翼只是没有挥舞铰和摆振铰,却仍然保留了变距用的轴向铰,因此也还不是真正的“无铰”。
由于保留了承受很大力矩和离心力的变距铰,结构重量难以减轻,结构的简化也受到了限制。
无铰式旋翼合乎逻辑的进一步发展,就是取消变距铰。
无轴承旋翼就是取消了挥舞铰、摆振铰和变距铰的旋翼,桨叶的挥舞、摆振和变距运动都以桨叶根部的柔性元件来完成。
西科斯基公司制出一种所谓“交叉梁”式的无轴承旋翼方案,原理简图见图2.2—17。
桨叶的主要承力件是一根单向碳纤维大梁。
士45’铺层的玻璃钢蒙皮构成了桨叶的外形,蒙皮与大梁之间充填泡沫塑料,到达根部蒙皮就转变成为空心的扭管。
空心扭管与大梁没有联系,其内端连操纵摇劈。
作用在操纵接臂上的操纵力从扭管向外传至大梁,使大梁在扭管中的那一部分产生扭转变形而实现变距。
这个方案引人注目地采用了交叉梁的布局,桨叶的离心力在大梁中自身得到平衡,有可能大大地减轻旋翼的重量。
与一般无铰式旋具相比,重量可减轻50%。
图2.2—18为美国波音—伏托尔公司研制的装于BO—105直升机上的无轴承旋翼方案。
它的特点是采用了两个“]”型结构的开剖面单向碳纤维梁,梁的内端与固定在旋翼轴上的连接盘相连接,外端连接桨叶,由士45’铺层的碳纤维构成、固定操纵摇臂的扭管则布置在两个“]”型梁之间。
两者之间没有联系,扭管外端与“]”型梁外端固定在一起,内端连接操纵摇劈,来自操纵拐劈上的操纵力通过扭管传给“]”型梁,使梁产生扭转变形,以实现变距。
 升级会员
升级会员 