竞赛模拟题目练习.docx
《竞赛模拟题目练习.docx》由会员分享,可在线阅读,更多相关《竞赛模拟题目练习.docx(20页珍藏版)》请在冰豆网上搜索。
竞赛模拟题目练习
模拟题目练习
1刚体位移测量装置
一、任务
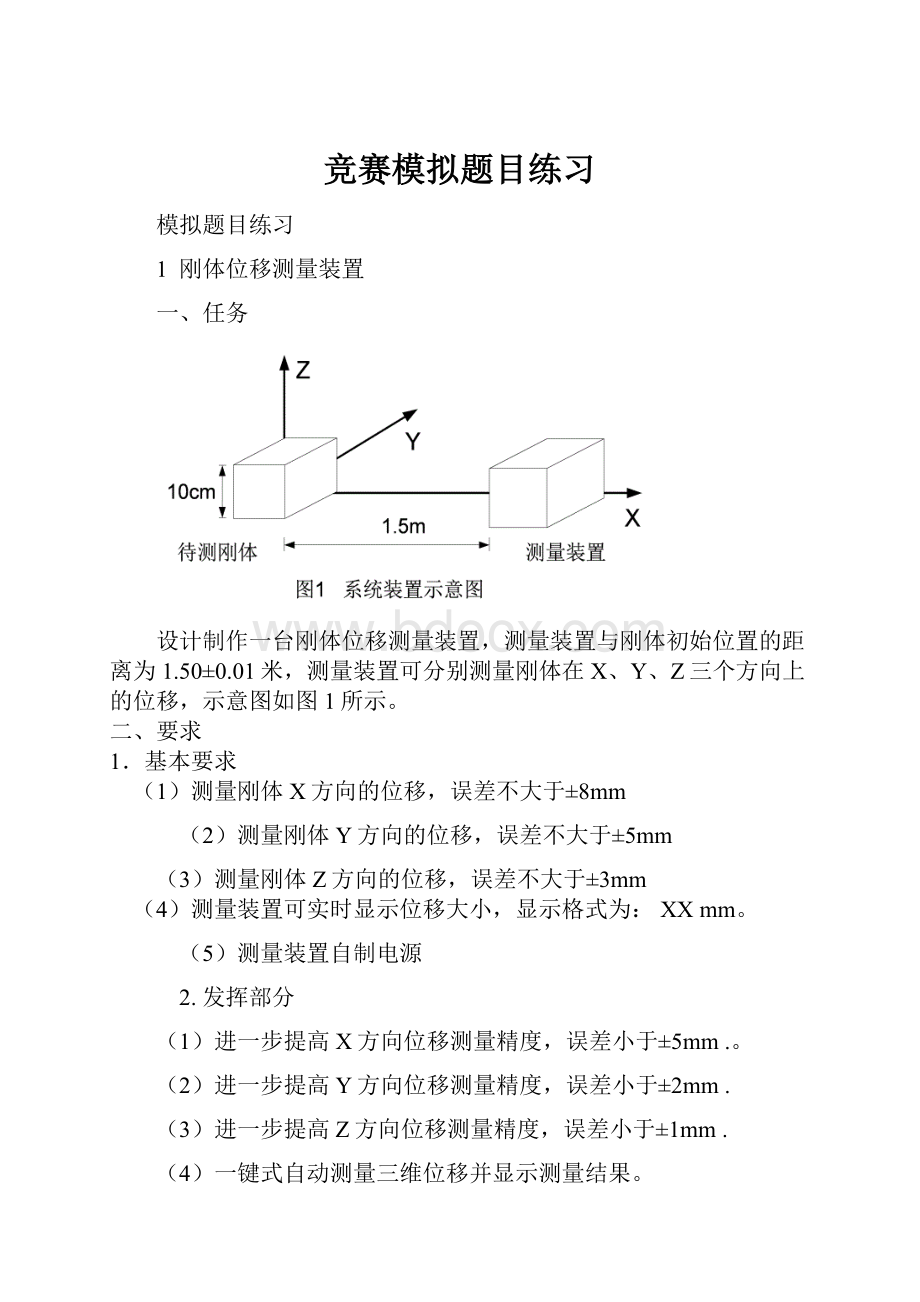
设计制作一台刚体位移测量装置,测量装置与刚体初始位置的距离为1.50±0.01米,测量装置可分别测量刚体在X、Y、Z三个方向上的位移,示意图如图1所示。
二、要求
1.基本要求
(1)测量刚体X方向的位移,误差不大于±8mm
(2)测量刚体Y方向的位移,误差不大于±5mm
(3)测量刚体Z方向的位移,误差不大于±3mm
(4)测量装置可实时显示位移大小,显示格式为:
XXmm。
(5)测量装置自制电源
2.发挥部分
(1)进一步提高X方向位移测量精度,误差小于±5mm.。
(2)进一步提高Y方向位移测量精度,误差小于±2mm.
(3)进一步提高Z方向位移测量精度,误差小于±1mm.
(4)一键式自动测量三维位移并显示测量结果。
(5)其他。
三说明
(1)被测刚体可用截面小于10X10cm,长度不大于50cm的不变形物体模拟,测量方法和传感器可任选。
(2)只允许在X方向上粘贴测量标志或装置;不得以刚体边缘作为测量参考点。
(3)X、Y方向最大位移不大于±5cm。
Z方向最大位移不大于3cm。
(4)测量装置和刚体的初始位置可由参赛人员确定。
进入测量状态后测量装置不得再移动。
(5)三维坐标上可设置以毫米为最小单位的刻度尺。
三、评分标准
太阳能路灯管理装置
一、任务
设计制作一台太阳能路灯管理装置,装置的原理示意图如图1所示。
太阳能电池板可用0-30V3A可调稳压电源ES模拟,蓄电池用0-15V可调稳压电源EC和3W10欧姆电阻R1模拟。
路灯用8只高亮度LED(3V、15mA)两路并联模拟。
二、要求
1、基本要求
(1)EC=11.0V,Es从14.0-21V变化时,充电电压VO=12V。
(2)EC=9V,Es从14.0-21V变化时,充电电流IC=1.0A。
(3)EC=12V,Es=9.0V时,充电电流IC尽可能大。
(4)EC=12V,Es从0逐渐升高时,能自动启动充电功能(IC>0)的Es小于6V。
(5)Es=0.5V时路灯自动开启。
2、发挥部分
(1)LED灯开启3秒后功率衰减灯光变暗再经3秒后灯灭。
上述时间可设定。
(2)LED灯具有恒流驱动控制功能。
(3)Es从0逐渐升高时,能自动启动充电功能的Es尽量低。
(4)Es=0V时,尽量降低蓄电池放电电流。
(5)其他。
说明:
1、太阳能路灯系统由太阳能电池板、蓄电池、LED灯和管理装置组成。
管理装置自动完成太阳能电池板对蓄电池的充电管理和对LED路灯的启、闭,亮、暗控制,管理装置由EC供电。
2、设计电路中不得使用升降压专业芯片,不得设置升降压转换开关。
3、两路LED灯的总电流为30mA,其恒流驱动控制不得使用LED驱动产品模块。
3点阵电子显示屏制作
一、任务
设计并制作一台简易LED电子显示屏,16行*32列点阵显示,原理示意图如下:
PC机
LED电子显示屏原理框图
二、要求
1、基本要求:
设计并制作LED电子显示屏和控制器。
1)自制一台简易16行*64列点阵显示的LED电子显示屏;
2)能显示4组特定汉字组成的句子,通过按键切换显示内容。
3)LED显示屏亮度连续可调。
4)实现实时时间的显示,显示屏数字显示:
时∶分∶秒(例如18∶38∶59);
5)增大到10组(每组汉字8个或16个数字和字符)预存信息,信息具有掉电保护;
6)实现和PC机通讯,通过PC机串口直接对显示信息进行更新(须做PC机客户程序);
四、说明
1.显示格式和显示信息可以自定义。
2.电子显示屏LED显示灯只允许使用8*8LED点阵显示模块。
3.显示屏的显示控制方案和控制器的选择方案任选。
4.不允许使用LED集成驱动模块。
4简易数字显示单相交流功率表
一、任务
设计并制作一个简易数字显示单相交流功率表,
要求
1、基本要求
(1)功率测量
a、测量电压的频率范围100Hz~500KHz。
b、功率测量范围1W~1000W(可分多档量程)。
c、数字显示。
d、测量误差≤±2%。
e、具有超量程自动闪烁功能。
(2)设计并制作该仪表所需要的直流稳压电源。
5自动控制升降旗系统
一.设计任务
设计一个自动控制升降旗系统,该系统能够自动控制升旗和降旗,升旗时,在旗杆的最高端自动停止;降旗时,在最低端自动停止。
自动控制升降旗系统的机械模型如图所示。
旗帜的升降由电动机驱动,该系统有两个控制按键,一个是上升键,一个是下降键。
二.设计要求
(一)基本部分
1.按下上升按键后,国旗匀速上升,同时流畅地演奏国歌;上升到最高端时自动停止上升,国歌停奏;按下下降按键后,国旗匀速下降,降旗的时间不放国歌,下降到最低端时自动停止。
2.能在指定的位置上自动停止。
3.为避免误动作,国旗在最高端时,按上升键不起作用;国旗在最低端时,按下降键不起作用。
4.升降旗的时间均为43秒钟,与国歌的演奏时间相等,同时,旗从旗杆的最下端上升到顶端。
降旗不演奏国歌,同时,旗从旗杆的最上端下降到底端。
5.数字即时显示旗帜所在的高度,以厘米为单位,误差不大于2厘米。
(二)发挥部分
增设一个开关,由开关控制是否是半旗状态,该状态由一发光二极管显示。
1.半旗状态(根据《国旗法》)。
升旗时,按上升键,奏国歌,国旗从最低端上升到最高端之后,国歌停奏,然后自动下降到总高度的2/3高度处停止;降旗时,按下降键,国旗先从2/3高度处上升到最高端,再自动从最高端下降到底之后自动停止,国歌停奏。
2.不论旗帜是在顶端还是在底端,关断电源之后重新合上电源,旗帜所在的高度数据显示不变。
3.要求升降旗的速度可调整,旗杆高度不变的情况下,升降旗时间的调整范围是30—120秒钟,步进1秒。
此时国歌停奏。
4.具有无线遥控升、降旗及停止功能。
说明:
旗帜用大于100克的重物代替。
滑轮
最高点
1.8米
电动机
起始点
G
6函数信号发生器
一、任务
设计制作一个函数信号发生器。
二、要求
1、基本要求
(1)正弦波、三角波、方波输出频率范围:
1kHz~10MHz;
(2)具有频率设置功能,频率步进:
100Hz;
(3)输出信号频率稳定度:
优于10-4;
(4)输出电压幅度:
在负载电阻上的电压峰-峰值Vopp≥1V;
(5)失真度:
用示波器观察时无明显失真。
2、发挥部分
在完成基本要求任务的基础上,增加如下功能:
(1)增加输出电压幅度:
在频率范围内负载电阻上正弦信号输出电压的峰-峰值Vopp=5V±1V;
(2)产生模拟幅度调制(AM)信号:
在1MHz~10MHz范围内调制度ma可在10%~100%之间程控调节,步进量10%,正弦调制信号频率为1kHz,调制信号自行产生;
(3)产生模拟频率调制(FM)信号:
在100kHz~10MHz频率范围内产生10kHz最大频偏,且最大频偏可分为5kHz/10kHz二级程控调节,正弦调制信号频率为1kHz,调制信号自行产生;
(4)产生二进制PSK、ASK信号:
在100kHz固定频率载波进行二进制键控,二进制基带序列码速率固定为10kbps,二进制基带序列信号自行产生;
(5)其他。
7开关电源设计
一、设计任务
设计并制作一个开关电源,
二、设计要求
1、基本要求
(1)输入电压范围:
180~240Vac。
(2)输出电压:
25.0Vdc。
(3)最大输出电流:
1.00A。
(4)电压调整率:
≤2%(在0.10A条件下测试)。
(5)负载调整率:
≤2%。
(6)纹波电压:
≤250mVp-p(在输入电压220Vac、满载条件下,用示波器测试)。
(7)DC/DC变换器(含控制显示电路)效率≥60%(在输入电压220Vac、满载条件下测试)。
(8)数字显示输出电压、电流;电压示数分辨率0.1V,精度1%;电流示数分辨率0.01A,精度1%。
(9)有键控开关功能
2、发挥部分
(1)输出电压可步进调整,调整范围:
25.0—30.0Vdc,步进值0.1V。
(2)最大输出电流:
1.50A。
(3)电压调整率:
≤1%(在0.15A条件下测试)。
(4)负载调整率:
≤1%。
(5)纹波电压:
≤150mVp-p(在输入电压220Vac、满载条件下,用示波器测试)。
(6)DC/DC变换器(含控制显示电路)效率≥70%(在输入电压220Vac、满载条件下测试)。
(7)有过流保护功能,自恢复。
(8)有软启动功能。
三、说明
1、测试时可以用电子负载;
2、测试输出纹波时,不能外加元件;
8集成电路芯片测试仪
一、任务
设计制作一个集成电路芯片测试仪,能对常用的74系列逻辑芯片进行逻辑功能测试,以确定芯片的好坏和型号。
二、要求
1.基本要求
(1)通过键盘输入型号,可以对74系列的00/02/04/08/10/11/20/21/27/30十种组合逻辑芯片进行逻辑功能测试,确定其功能正确性;
(2)通过键盘输入管腿特性,可以确定上述74系列的组合逻辑芯片的型号;
(3)显示上述芯片的逻辑符号和逻辑表达式。
2.发挥部分
将上述三项基本要求扩展到74系列时序电路:
74/109/160/245等。
(1)通过键盘输入型号,可以对74系列的74/109/160/245等芯片进行逻辑功能测试,确定其功能正确性;
(2)通过键盘输入管腿特性,可以确定上述74系列时序逻辑芯片的型号;
(3)显示上述芯片的逻辑符号和状态转换图;
(4)其它特色与创新。
9具有实时语音播报的超声波测距测速仪
一、任务
设计并制作一台具有实时语音播报的超声波测距测速仪,被测物为一块面积不大于30cmX20cm的实物(可以和小车装在一起)。
测距测速仪用4节干电池供电。
二、要求
1.基本要求
(1)具有超声波测距功能,测量距离0.2m~3.0m,测距精度±1cm;
(2)自动语音实时播报测量距离数值,格式:
几点几几米;实时播报时间间隔≤10s;实时播报声音清晰明亮、无明显失真,在1米距离处人耳能准确分辨。
(3)实时显示测量的距离,显示要与语音播报同步,显示格式为:
X.XXm。
2.发挥部分
(1)测量距离:
0.2m~20.0m,测距精度:
±0.3cm,并实时播报与显示。
(2)汉字提醒显示:
距离在0.2m~2.0m,显示“危险距离”并用红色LED灯指示;距离在2.0m~3.0m,显示“保持距离”并用黄色LED灯指示;距离在3.0m以上,显示“安全距离”并用绿色LED灯指示。
(3)具有测速功能,实时播报与显示被测物运动速度,测量精度:
±5%。
(4)其他特色与创新。
10立体声音频功率放大器
一、任务
设计并制作一个立体声音频功率放大器。
二、要求
1、基本要求
在放大通道的正弦信号输入电压幅度为500mV~1V,等效负载电阻RL=8Ω时,放大器应满足:
(1)额定输出功率(单通道)PO≥10W(可使用集成功率放大电路或大功率晶体三极管)。
(2)频率响应:
fL~fH=20Hz~20kHz。
(3)在满足PO和频率响应下的谐波失真≤3%。
(4)在PO下的效率≥55%。
(5)信噪比(S/N)≥55dB。
(6)自制放大器所需的电源(电源变压器可购成品)。
2、发挥部分
(1)制作四音源选择电路,用轻触开关(单只或四只)实现音源转换。
(2)制作实用音调控制电路,音调控制范围≥12dB,音调特性自定。
(3)制作数字音量控制电路(不可使用专用音响音量控制集成电路,可用通用数字电路及单片机控制电路实现),用两只轻触开关分别实现音量的加减。
(4)功能显示:
音源选择显示,音量加减显示(用液晶屏显示)。
(5)其它(制作的工艺、其它实用功能的扩展等)。
11非接触供电系统
一、任务
在不采用专用器件(芯片)的前提下,设计并制作非接触供电系统,可实现对小型电器供电或充电等功能。
二、要求
1.基本要求
(1)供电部分输入直流低压(不超过36V),具有向其他电器设备非接触供电的功能。
(2)其他用电设备与供电部分无电接触,实现非接触供电。
(3)在输出功率≥1W的条件下,转换效率≥10%。
2.发挥部分
(1)可同时对多种设备非接触供电。
(2)最大输出功率≥5W。
(3)转换效率≥15%(输出功率≥1W)。
(4)其他实用功能扩展及性能指标改善措施。
12电子防丢器
一、基本要求
1、制作无线发射、接收装置各一个,其中一个置于钱包(或手机)(假设为A部分),另一个随身携带(假设为B部分)。
正常条件下,不报警。
当发射接收模块相距大于某范围(3~5米)时,表示钱包或手机已经被人偷走,另一半装置报警,在该范围内则不报警。
2、A、B部分工作电压不大于3V,工作电流不超过20mA。
3、天线长度不超过25cm。
4、发射功率不得超过20mW。
二、扩展功能
1、制作多套装置(实际制作两套),要求不同的发射模块能唯一识别对应的接收模块,而不受其它模块干扰。
2、采用3V纽扣电池供电。
3、报警距离可调。
4、提出论证并实现低功耗方案。
(要求方案合理可行。
例如采用间歇工作方式,就需要提出有效的同步措施和握手规范等)。
四、说明
1、验收时需要测量电流,请在电源处预留出测试端。
2、发射功率在50欧假负载上测定。
3、扩展功能第一部分要求识别ID可变,即:
假设目前装置甲的发射模块A能识别接收模块B,装置乙的发射模块能C别接收模块D;要求通过按键或者其它设定能使模块D能识别模块A,模块B能识别模块C。
4、不得采用现成的无线发射接收的模块。
13多功能计数器
一、任务
设计并制作一台测量正弦信号的频率、周期和相位差的多功能计数器。
二、要求
1.基本要求
(1)频率测量
a.测量范围:
1Hz~1MHz;信号幅度范围:
0.5Vrms~5Vrms。
b.测量误差≤10-3。
(2)周期测量
a.测量范围:
1μs~1s;信号幅度范围:
0.5Vrms~5Vrms;
b.测量误差≤10-3。
(3)相位差测量
a.量程:
0~360°;测量准确度:
1°;分辨率:
0.1°。
b.信号频率范围:
10Hz~100kHz;信号幅度范围:
0.5Vrms~5Vrms。
2.发挥部分
(1)频率测量、周期测量的信号频率范围扩展为1Hz~10MHz(信号幅度0.5Vrms~5Vrms)。
(2)频率测量、周期测量的测量误差为10-6(信号频率范围1Hz~10MHz,闸门时间=1s)。
(3)频率测量、周期测量的信号幅度范围为0.01Vrms~5Vrms(信号频率范围1Hz~10MHz,测量误差为10-6);并进一步降低频率测量、周期测量时的最小信号幅度。
(4)其它。
三、说明
1.单片机要求采用MPS430(或者至少3片TI芯片),频率、周期测量单元不允许采用专用频率计模板。
2.自制用于相位测量的相移电路。
3.相位差实际的测量范围应达到:
[0+2f×10-5]°~[360-2f×10-5]°,式中:
f为被测信号频率(单位为Hz)。
4.设计报告正文中应包括系统总体框图、核心电路原理图、主要流程图、主要的测试结果。
完整的电路原理图、重要的源程序和完整的测试结果可用附件给出。
14位移测量装置
一、任务
设计并制作一台位移测量装置,其原理示意图如图1所示(虚线框内部分可以用硬件实现,也可以用软件实现)。
图1位移测量装置原理示意图
二、要求
1.基本要求
(1)制作正弦信号激励电路,技术指标如下:
a.频率:
100kHz;
b.驱动线性可变差动变压器时输出波形无明显失真(要求在图1的C点预留测量端)。
(2)设计、制作差动信号测量电路,包括线性可变差动变压器,放大、整流、滤波等电路,数据处理和显示等单元。
在图1中的A、B两点分别输出直流电压信号VA、VB(要求A、B两点预留测量端)。
(3)用模拟或数字方法计算
(要求图1的D点预留测量端或显示d值),根据d值计算、显示实际位移量。
(4)测量的位移范围为-10~+10mm,测量误差的绝对值不大于2mm。
2.发挥部分
(1)将测量的位移范围扩展到-20~+20mm,测量误差达到基本要求(4)。
(2)进一步提高位移测量精度。
(3)设计一个闭环控制电路,要求用直流电机(不允许使用步进电机)驱动磁棒移动,控制磁棒达到设定位移,位移误差的绝对值不大于2mm。
(4)其他。
三、说明
1.至少使用3片TI公司的芯片,其中差分输出电路指定使用THS4503;推荐使用的芯片有:
①ADC:
ADS7886;②DAC:
TLV5616。
2.线性可变差动变压器的磁棒可选用收音机的中波用铁淦氧磁棒,亦可选用其他合适的磁性材料棒。
线圈建议用φ(0.1~0.2)mm的漆包线绕制在牛皮纸或其他绝缘材料制作的骨架上,整个线圈固定在一块绝缘板上。
磁棒的一端可用环氧树脂粘接一段绝缘杆,手持绝缘杆可使磁棒沿线圈轴向移动。
要求在绝缘板和绝缘杆上用细线标出位移显示为0时的相对位置。
设计、绕制线圈时应注意以下两点:
①避免电路出现谐振;②为保证测量的线性,L2和L3的绕制位置应严格对称于L1。
3.设计报告正文应包括系统总体框图、核心电路原理图、主要流程图和主要的测试结果。
完整的电路原理图、重要的源程序和完整的测试结果可用附件给出。
15简易水下无线通信系统
一、任务
设计并制作用于控制潜艇航模运动的简易水下无线通信系统,示意图如图1所示。
图1简易水下无线通信系统示意图
注:
简易无线系统由陆基单元、电机单元和潜艇航模组成。
陆基单元利用电磁波与潜艇航模进行通信(工作频率为507kHz),潜艇航模与横梁上的电机单元采用红外光波通信;由电机单元控制悬索收、放来实现潜艇航模上浮、下潜;利用航模上的LED显示分别模拟航模前进、倒车、停车、左、右转弯。
二、要求
1、基本要求
(1)天线与水面最近距离1米时,实现无线系统对潜艇航模的各种运动方式操控。
(2)潜艇航模应能上浮、下潜在指定的水深处,要求误差小于2。
(3)当潜艇航模从水深5cm处快速下潜至水深24cm处时,要求时间为(3±0.2)秒;当潜艇航模从水深24cm处快速上浮至水深5cm处时,要求时间为(4±0.3)秒。
(4)当潜艇航模从水深5cm处慢速下潜至水深29cm处时,要求时间为(6±0.5)秒;潜艇航模从水深29cm处慢速上浮至水深5cm处时,要求时间为(8±0.5)秒。
2、发挥部分
(1)天线与水面最近距离5米时,无线系统应能控制潜艇航模实现基本要求
(1)。
(2)系统能设置潜艇航模下潜、上浮的速度(单位为cm/s),并按所设置的速度运行。
(3)尽可能地加大天线与水面的最近距离,实现基本要求
(1)。
(4)其它。
三、说明
1、至少使用2片TI芯片,其中,指定使用OPA561芯片,推荐使用MPS430,TLC372,TRF3750芯片。
2、水池选用长、宽、高不小于40cm的塑料箱;悬索选用1米长(有厘米、毫米刻度)的塑料卷尺;潜水深度定义为潜艇航模顶部与悬索接触点至水平面的距离,水池的水深为38cm。
3、电机单元固定在横梁上,悬挂潜艇航模的悬索固定在电机上,潜艇航模垂直中心线应对准水池的中心位置;天线选用L形线天线,天线的水平部分长度为10m。
4、自选易于密封的绝缘材料制作潜艇航模,航模长度为10cm、宽度为10cm、高度为5cm。
5、设计报告正文中应包括系统总体框图、核心电路原理图、主要流程图、主要的测试结果。
完整的电路原理图、重要的源程序和完整的测试结果可用附件给出。
 升级会员
升级会员 