多轴无人机装配与调试初级.docx
《多轴无人机装配与调试初级.docx》由会员分享,可在线阅读,更多相关《多轴无人机装配与调试初级.docx(20页珍藏版)》请在冰豆网上搜索。
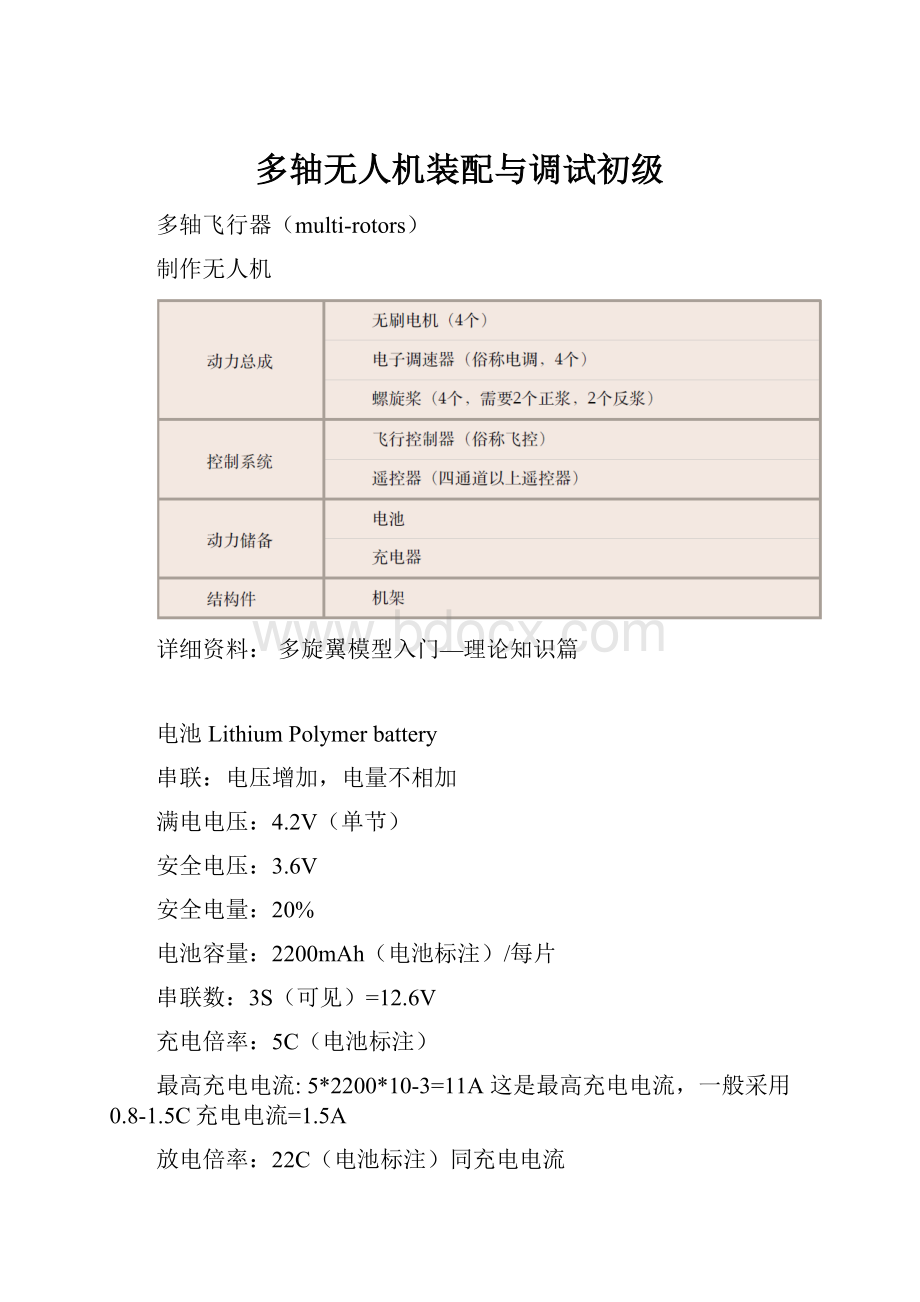
多轴无人机装配与调试初级
多轴飞行器(multi-rotors)
制作无人机
详细资料:
多旋翼模型入门—理论知识篇
电池LithiumPolymerbattery
串联:
电压增加,电量不相加
满电电压:
4.2V(单节)
安全电压:
3.6V
安全电量:
20%
电池容量:
2200mAh(电池标注)/每片
串联数:
3S(可见)=12.6V
充电倍率:
5C(电池标注)
最高充电电流:
5*2200*10-3=11A这是最高充电电流,一般采用0.8-1.5C充电电流=1.5A
放电倍率:
22C(电池标注)同充电电流
储存电压:
3.8V
Smartbatterymeter
插入时候注意正负极,可以测总电压、电量和分电压、电量。
同时还可以给电机产生模拟信号:
插入后长按cell键进入其他模式,F1balance平衡电池电量,短按cell进入模式中;
按mode切换到F2dis放电模式,同理F2测阻模式,F4产生一定的信号。
F4产生的信号可以通过输出给电调,用以测试轴的旋转方向。
在每一个模式中,短按cell可返回模式选择界面,长按返回最初界面。
充电器
主要需要的选项:
电池类型Li-Po,并行度3S,充电类型平衡(充电时选)、放电、存储等,充电电流。
详见说明书。
无刷电机与电调motorsandelectronicspeedcontrollers(ESCs)
可参考:
四旋翼飞行器结构和原理+四轴飞行diy全套入门教程
无刷电机
电机为飞行器提供动力。
由电调输出的三相交流电驱动。
三条线中互换两条会将电机的转向反向。
电机不直接接电池。
四六八轴飞行器转向:
安装螺旋桨时,注意螺旋桨转向必须保证推力向上,风向下推进。
凸面为迎风面,对于四轴来说,就是凸面朝上。
电子调速器(ESC)
因为电池输入的是直流电,电流需要电子调速器将其变成三相交流电,还需要从遥控器接收机那里接收控制信号,控制电机的转速
输入信号:
红黑(粗)电源线、黑白(细)信号线,自飞控
输出信号:
三相信号,☞电机
飞控(Flightcontroller)
最重要的用途就是通过软件算法,解析飞行器姿态,修正由于飞行器安装、外界干扰、零件之间的不一致等原因形成的姿态异常。
通过PID(theprimarycorrectionerror(P),theerrorovertime(I),andtheinstantaneouserror(D))控制调节飞行器。
1、P产生响应速度,过小响应慢,过大会产生振荡,是I和D的基础
2、I消除偏差、提高精度(在有系统误差和外力作用时),同时增加了响应速度
3、D抑制过冲和振荡,同时减慢了响应速度
飞控是飞行器的核心,连接各设备。
飞控上连接有:
ESC
电源
解锁开关
PPM(或其他)编码线,编码线连接遥控器接收
GPS
数传
pixhawk飞控
wenku.baidu./link?
url=0dbSi6Y2pypL_9IVTYCSmyzPjI9nQVzf2EgsU8FXFde-pE37Q-r0Tv6rm6kkx3U1xGM33BD2YEdZKGRKb4MOxqTUki5OZzV1w0VpxvRLETy快速使用指南
官网:
.pixhawk./
APM飞控
CC3D飞控
接线:
.dronetrest./t/cc3d-flight-controller-guide/830
.mobibrw./category/cc3d
遥控器与接收机
上下:
油门throttle,左右:
倾侧roll,前后:
俯仰pitch,旋转:
航向yew
Yaw<>Rudder-----Rotatesaricraftaroundverticalaxis,spinsitaround
Pitch<>Elevator-------Thenoseoftheaircraftgoesupanddown
Roll<>Aileron--------Theleftorrightsidesoftheaircraftgoupanddown
其他设置详见说明书。
总接线图
地面站
地面站在飞行器组装完成后,用于调试飞行器与遥控器。
见CC3D飞控软件设置
与飞行器进行数据传输,向飞行器发送位置、高度等各类信息,飞行器向地面站反馈相关信息。
pixhawk地面站
设置与使用详见pixhawk用户手册v1.0
CC3D地面站
获取网址:
wiki.openpilot.cc/openpilot-gcs-download.html
指导帖:
bbs.5imx./forum.php?
mod=viewthread&tid=974027
视频教程:
.exuav./forum.php?
mod=viewthread&tid=270&extra=page%3D1
模拟工具
模拟工具用来练习飞行。
PhoenixRCv4.0.m
软件位置:
E:
\飞行器模拟软件\A盘\A\PhoenixRC
 升级会员
升级会员 