第9章气压传动基础知识.docx
《第9章气压传动基础知识.docx》由会员分享,可在线阅读,更多相关《第9章气压传动基础知识.docx(27页珍藏版)》请在冰豆网上搜索。
第9章气压传动基础知识
第9章气压传动基础知识
9.1气压传动与控制的定义及工作原理
9.1.1气压传动与控制的定义
气压传动与控制技术简称气动,是以压缩空气为工作介质来进行能量与信号的传递,是实现各种生产过程、自动控制的一门技术。
它是流体传动与控制学科的一个重要组成部分。
近几十年来,气压传动技术被广泛应用于工业产业中的自动化和省力化,在促进自动化的发展中起到了极为重要的作用。
9.1.2气压传动与控制的工作原理
通过下面一个典型气压传动系统来理解气动系统如何进行能量传信号传递,如何实现控制自动化。
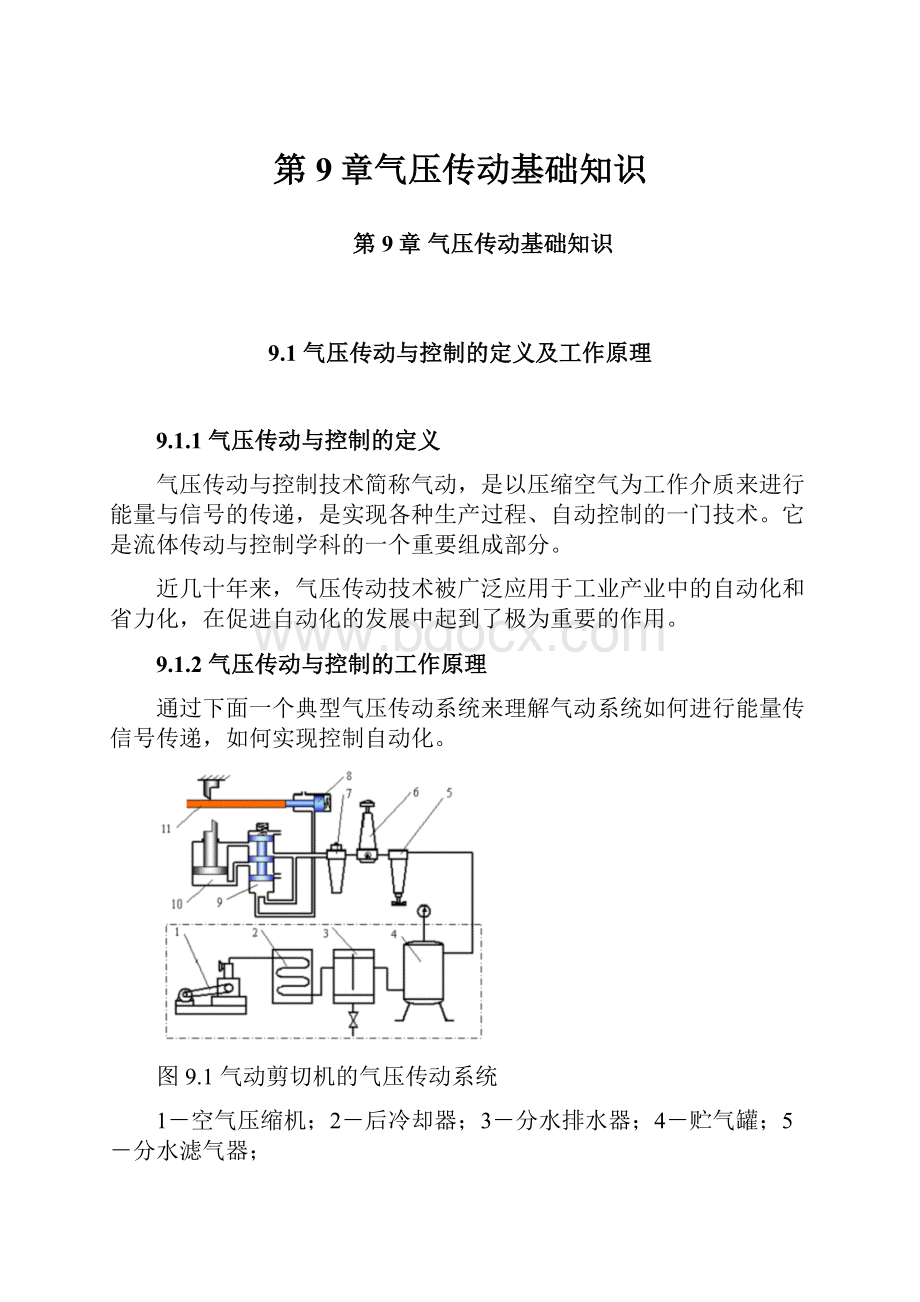
图9.1气动剪切机的气压传动系统
1-空气压缩机;2-后冷却器;3-分水排水器;4-贮气罐;5-分水滤气器;
6-减压阀;7-油雾器;8-行程阀;9-气控换向阀;10-气缸;11-工料。
以气动剪切机为例,介绍气压传动的工作原理。
图9.1所示为气动剪切机的工作原理图,图示位置为剪切前的情况。
空气压缩机1产生的压缩空气经后冷却器2、分水排水器3、贮气罐4、分水滤气器5、减压阀6、油雾器7、到达换向阀9,部分气体经节流通路进入换向阀9的下腔,使上腔弹簧压缩,换向阀9阀芯位于上端;大部分压缩空气经换向阀9后进入气缸10的上腔,而气缸的下腔经换向阀与大气相通,故气缸活塞处于最下端位置。
当上料装置把工料11送入剪切机并到达规定位置时,工料压下行程阀8,此时换向阀9阀芯下腔压缩空气经行程阀8排入大气,在弹簧的推动下,换向阀9阀芯向下运动至下端;压缩空气则经换向阀9后进入气缸的下腔,上腔经换向阀9与大气相通,气缸活塞向上运动,带动剪刀上行剪断工料。
工料剪下后,即与行程阀8脱开。
行程阀8阀芯在弹簧作用下复位、出路堵死。
换向阀9阀芯上移.气缸活塞向下运动,又恢复到剪断前的状态。
图9.2所示为用图形符号绘制的气动剪切机系统原理图。
图9.2气动剪切机系统图形符号
在气压传动系统中,根据气动元件和装置的不同功能,可将气压传动系统分成以下四个组成部分,如图9.1所示。
1.气源装置气源装置将原动机提供的机械能转变为气体的压力能,为系统提供压缩空气。
它主要由空气压缩机构成,还配有贮气罐、气源净化装置等附属设备。
2.执行元件执行元件起能量转换作用,把压缩空气的压力能转换成工作装置的机械能。
主要形式有,气缸输出直线往复式机械能、摆动气缸和气马达分别输出回转摆动式和旋转式的机械能。
对于以真空压力为动力源的系统,采用真空吸盘以完成各种吸吊作业。
3.控制元件控制元件用来对压缩空气的压力、流量和流动方向调节和控制,使系统执行机构按功能要求的程序和性能工作。
根据完成功能不同,控制元件种类有很多种,气压传动系统中一般包括压力、流量、方向和逻辑等四大类控制元件。
4.辅助元件辅助元件是用于元件内部润滑、排气噪声、元件间的连接以及信号转换、显示、放大、检测等所需的各种气动元件。
如油雾器、消声器、管件及管接头、转换器、显示器、传感器等。
9.2气压传动的优缺点及发展应用
9.2.1气压传动的优点
气压传动具有以下优点:
1.使用方便
空气作为工作介质,空气到处都有,来源方便,用过以后直接排入大气,不会污染环境,可少设置或不必设置回气管道。
2.系统组装方便
使用快速接头可以非常简单地进行配管,因此系统的组装、维修以及元件的更换比较简单。
3.快速性好
动作迅速反应快,可在较短的时间内达到所需的压力和速度。
在一定的超载运行下也能保证系统安全工作,并且不易发生过热现象。
4.安全可靠
压缩空气不会爆炸或着火,在易燃、易爆场所使用不需要昂贵的防爆设施。
可安全可靠地应用于易燃、易爆、多尘埃、辐射、强磁、振动、冲击等恶劣的环境中。
5.储存方便
气压具有较高的自保持能力,压缩空气可储存在贮气罐内,随时取用。
即使压缩机停止运行,气阀关闭,气动系统仍可维持一个稳定的压力。
故不需压缩机的连续运转。
6.可远距离传输
由于空气的粘度小,流动阻力小,管道中空气流动的沿程压力损失小,有利于介质集中供应和远距离输送。
空气不论距离远近,极易由管道输送。
7.能过载保护
气动机构与工作部件,可以超载而停止不动,因此无过载的危险。
8.清洁
基本无污染,对于要求高净化、无污染的场合,如食品、印刷、木材和纺织工业等是极为重要的,气动具有独特的适应能力,优于液压、电子、电气控制。
9.2.2气压传动的缺点
气压传动也存在如下的缺点
1.速度稳定性差由于空气可压缩性大,气缸的运动速度易随负载的变化而变化,稳定性较差,给位置控制和速度控制精度带来较大影响。
2.需要净化和润滑压缩空气必须有良好的处理,去除含有的灰尘和水分。
空气本身没有润滑性,系统中必须采取措施对元件进行给油润滑,如加油雾器等装置进行供油润滑。
3.输出力小经济工作压力低(一般低于0.8MPa),因而气动系统输出力小,在相同输出力的情况下,气动装置比液压装置尺寸大。
输出力限制在20~30kN之间。
4.噪声大排放空气的声音很大,现在这个问题已因吸音材料和消音器的发展大部分获得解决。
需要加装消音器。
5.难以实现精确定位。
气压传动与其它传动的性能比较如表9.1。
表9.1气压传动与其它传动的性能比较
类型
操作力
动作快慢
环境要求
构造
负载变化影响
操作距离
无级调速
工作寿命
维护
价格
气压传动
中等
较快
适应性好
简单
较大
中距离
较好
长
一般
便宜
液压传动
最大
较慢
不怕振动
复杂
有一些
短距离
良好
一般
要求高
稍贵
电
传
动
电气
中等
快
要求高
稍复杂
几乎没有
远距离
良好
较短
要求较高
稍贵
电子
最小
最快
要求特高
最复杂
没有
远距离
良好
短
要求更高
最贵
机械传动
较大
一般
一般
一般
没有
短距离
较困难
一般
简单
一般
9.2.3气压传动的发展应用
目前气动控制装置在下述几方面有普遍的应用:
1.机械制造业
其中包括机械加工生产线上工件的装夹及搬送,铸造生产线上的造型、捣固、合箱等。
在汽车制造中,汽车自动化生产线、车体部件自动搬运与固定、自动焊接等。
2.电子IC及电器行业
如用于硅片的搬运,元器件的插装与锡焊,家用电器的组装等。
3.石油、化工业
用管道输送介质的自动化流程绝大多数采用气动控制,如石油提炼加工、气体加工、化肥生产等。
4.轻工食品包装业
其中包括各种半自动或全自动包装生产线,例如:
酒类、油类、煤气罐装,各种食品的包装等。
5.机器人
例如装配机器人,喷漆机器人,搬运机器人以及爬墙、焊接机器人等。
6.其它
如车辆刹车装置,车门开闭装置,颗粒物质的筛选,鱼雷导弹自动控制装置等。
目前各种气动工具的广泛使用,也是气动技术应用的一个组成部分。
气动产品的发展趋势主要体现在以下方面:
1.小型化、集成化
气动元件有些使用场合,有限的空间要求气动元件外形尺寸尽量小,小型化是主要发展趋势。
2.组合化、智能化
最常见的组合是带阀、带开关气缸。
在物料搬运中,还使用了气缸、摆动气缸、气动夹头和真空吸盘的组合体,同时配有电磁阀、程控器,结构紧凑,占用空间小,行程可调。
3.精密化
目前开发了非圆活塞气缸、带导杆气缸等可减小普通气缸活塞杆工作时的摆转;为了使气缸精确定位开发了制动气缸等。
为了使气缸的定位更精确,使用了传感器、比例阀等实现反馈控制,定位精度达0.01mm。
在精密气缸方面已开发了0.3mm/s低速气缸和0.01N微小载荷气缸。
在气源处理中,过滤精度0.01mm,过滤效率为99.9999%的过滤器和灵敏度0.001MPa的减压阀业已开发出来。
4.高速化
目前气缸的活塞速度范围为50~750mm/s。
为了提高生产率,自动化的节拍正在加快。
今后要求气缸的活塞速度提高到5~10m/s。
与此相应,阀的响应速度也将加快,要求由现在的1/100秒级提高到1/1000秒级。
5.无油、无味、无菌化
由于人类对环境的要求越来越高,不希望气动元件排放的废气带油雾污染环境,因此无油润滑的气动元件将会普及。
还有些特殊行业,如食品、饮料、制药、电子等,对空气的要求更为严格,除无油外,还要求无味、无菌等,这类特殊要求的过滤器将被不断开发出来。
6.高寿命、高可靠性和智能诊断功能
气动元件大多用于自动化生产中,元件的故障往往会影响设备的运行,使生产线停止工作,造成严重的经济损失,因此,对气动元件的工程可靠性提出了更高的要求。
7.节能、低功耗
气动元件的低功耗能够节约能源,并能更好地与微电子技术相结合。
功耗≤0.5W的电磁阀已开发和商品化,可由计算机直接控制。
8.机电一体化
为了精确达到预定的控制目标,应采用闭路反馈控制方式。
为了实现这种控制方式要解决计算机的数字信号,传感器反馈模拟信号和气动控制气压或气流量三者之间的相互转换问题。
9.应用新技术、新工艺、新材料
在气动元件制造中,型材挤压、铸件浸渗和模块拼装等技术已在国内广泛应用;压铸新技术(液压抽芯、真空压铸等)目前已在国内逐步推广;压电技术、总线技术,新型软磁材料、透析滤膜等正在被应用。
9.3空气的物理性质
要了解和正确设计气压传动系统,首先必须了解空气的性质,掌握气压传动的基本概念及计算。
9.3.1空气的组成成分
大气中的空气主要是由氮、氧、氩、二氧化碳,水蒸气以及其它一些气体等若干种气体混合组成的。
含有水蒸气的空气为湿空气。
大气中的空气基本上都是湿空气。
而把不含有水蒸气的空气称为干空气。
在距地面20km以内,空气组成几乎相同。
在基准状态(0℃,绝对压力为101325Pa,相对湿度为0)下地面附近的干空气的组成见表9-2。
9-2空气的组成
空气的主要组成
N2
O2
Ar
CO2
备注
质量组成%
75.5
23.1
1.28
0.045
其他气体约占0.075
容积组成%
78.09
20.95
0.93
0.03
相对分子质量
28
32
40
44
空气中氮气所占比例最大,由于氮气的化学性质不活泼,具有稳定性,不会自燃,所以空气作为工作介质可以用在易燃、易爆场所。
9.3.2空气的密度
单位体积空气的质量,称为空气的密度ρ(kg/m3),其公式为
ρ=m/V(9-1)
式中ρ—空气密度;
m—空气的质量(kg);
V—空气的体积(m3)。
气体密度与气体压力和温度有关,压力增加,密度增加,而温度上升,密度减少。
在基准状态下,干空气的密度为1.293kg/m3,在温度t(℃)、压力(MPa)下的干空气的密度可用下式计算
(9-2)
式中ρ0—基准状态下的干空气密度;
p—绝对压力(MPa);
ρ—干空气的密度;
t—温度(℃),其中(273+t)为绝对温度(K)。
对于湿空气的密度可用下式计算
(9-3)
式中ρ'—湿空气的密度;
p—湿空气的全压力(MPa);
φ—空气的相对湿度(%);
pb—温度为t℃时饱和空气中水蒸气的分压力(MPa)。
9.3.3空气的粘性
空气在流动过程中产生的内摩擦阻力的性质叫做空气的粘性,用粘度表示其大小。
空气的粘度受压力的影响很小,一般可忽略不计。
随温度的升高,空气分子热运动加剧,因此,空气的粘度随温度的升高而略有增加。
粘度随温度的变化关系见表9-3。
表9-3空气的运动粘度ν随温度的变化值(压力为0.1MPa)
t/℃
0
5
10
20
30
40
60
80
100
ν/(10-4m2/s)
0.133
0.142
0.147
0.157
0.166
0.176
0.196
0.21
0.238
9.3.4空气的压缩性和膨胀性
气体与液体和固体相比具有明显的压缩性和膨胀性。
空气的体积较易随压力和温度的变化而变化。
例如,对于大气压下的气体等温压缩,压力增大0.1MPa,体积减小一半。
而将油的压力增大18MPa,其体积仅缩小1%。
在压力不变、温度变化1℃时,气体体积变化约1/273,而水的体积只改变1/20000,空气体积变化的能力是水的73倍。
气体体积在外界作用下容易产生变化,气体的可压缩性导致气压传动系统刚度差,定位精度低。
气体体积随温度和压力的变化规律遵循气体状态方程。
9.3.5空气的湿度
由于地球上的水不断地蒸发到空气中,空气中含有水蒸气,我们把含有水蒸气的空气称为湿空气。
自然界中的空气基本上都是湿空气。
由湿空气生成的压缩空气对气动系统的稳定性和寿命有不良的影响。
如湿度大的空气会使气动元件腐蚀生锈,润滑剂稀释变质等。
为保证气动系统正常工作,在压缩机出口处要安装冷却器,把压缩空气中的水蒸气凝结析出,在贮气罐出口处安装空气干燥器,进一步消除空气中的水分。
根据达尔顿(Dalton)法则,混合在一起的各种气体相互之间不发生化学反应时,各气体将互不干涉地单独运动。
混合气体的压力(全压)等于各种气体的分压之和。
因此,湿空气的压力p应为干空气的分压力pg与水蒸气的分压力ps之和,即
(9-4)
确定空气的干湿程度,首先需了解几个衡量湿空气性质的物理量。
(1)绝对湿度每一立方米的湿空气中,含有水蒸气的质量称为湿空气的绝对湿度。
用χ表示
(9-5)
式中ms——水蒸气的质量(kg)
V——湿空气的体积(m3)
在一定的压力和温度下,含有最大限度水蒸气量的空气叫做饱和湿空气。
1m3饱和湿空气中所含水蒸气的质量称为饱和湿空气的绝对湿度。
(9-6)
式中xb—饱和绝对湿度(kg/m3);
ρb—饱和湿空气中水蒸气的密度(kg/m3);
pS—饱和湿空气中水蒸气的分压力(Pa)
RS—水蒸气的气体常数,RS=462.05J/kg·K。
T—绝对温度(K)
(2)相对湿度在同一温度下,湿空气中水蒸气分压ps和饱和水蒸气分压pb的比值称为相对湿度,用φ表示
(9-7)
通常,湿空气大多是处于未饱和状态所以应了解它继续吸收水分的能力和离饱和状态的远近。
引入相对湿度概念清楚地说明了这个问题。
当空气绝对干燥时,ps=0,则φ=0。
当湿空气饱和时,ps=pb,则φ=100%,称此时的空气为绝对湿空气。
一般φ在0~1之间变化,当空气的相对湿度φ=60%~70%时,人感觉舒适,而气动系统中元件使用的工作介质的相对湿度不得大于90%,当然希望越小越好。
相对湿度既反映了湿空气的饱和程度,也反映了湿空气离饱和程度的远近。
有时φ也用同一温度下,湿空气的绝对湿度与饱和绝对湿度之比来确定,即
(9-8)
(3)空气的含湿量
除了用绝对湿度、相对湿度表示湿空气中所含水蒸气的多少外,还可以用空气的含湿量d来表示。
空气的含湿量是指在质量为1kg的湿空气中,混合的水蒸气质量与绝对干空气质量的比,即
(9-9)
式中ms—水蒸气的质量(kg);
mg—干空气的质量(kg)。
用单位体积干空气中混合的水蒸气质量表示的含湿量,称为容积含湿量,以d'表示。
即
(9-10)
式中d'—容积含湿量(kg/m3);
ρg—干空气的密度;
Vg—干空气的体积。
含湿量大小决定于温度t,相对湿度φ和全压力p。
若p不变,φ=1时,含湿量达到最大值。
9.3.6压缩空气的品质
(1)压缩空气的污染及其影响
空气污染是指空气中混入或产生某些污染物质。
主要污染物有水分、固体杂质和油分等。
其主要来源如下:
由压缩机吸入的空气所包含的水分、粉尘、烟尘等;由系统内部产生压缩机润滑油、元件磨损物、冷凝水、锈蚀物等;由安装、装配或维修时混入的湿空气、异物等。
污染物对气动系统工作会造成许多不良影响。
如水分会造成管道及金属零件锈蚀,导致管道及元件流量不足,压力损失增大,甚至导致阀的动作失灵;水分混入润滑油中会使润滑油变质,液态水会冲洗掉润滑脂,导致润滑不良;在寒冷地区以及元件内的高速流动区,水分会结冰,造成元件动作不良,管道冻结或冻裂。
润滑油变质后粘度增大,并与其他杂质混合形成油泥。
它会使橡胶及塑料材料变质或老化,堵塞元件内的小孔,影响元件性能,造成元件动作失灵。
粉尘和锈屑、磨损产生的固体颗粒会使运动件磨损,造成元件动作不良,甚至卡死,同时加速了过滤器滤芯的堵塞,增大了流动阻力。
(2)压缩空气的质量等级
不同的应用对象对气动装置及作业环境的洁净度要求各有不同,相应的气动系统对压缩空气质量的要求也不同。
ISO85731标准根据对压缩空气中的固体尘埃颗粒度、含水率(以压力露点形式要求)和含油率的要求划分了压缩空气的质量等级。
9.5气体状态方程
9.5.1理想气体的状态方程
理想气体是一种假想没有粘性的气体,忽略气体分子之间比较小的相互作用力,把气体分子看成是一些有弹性、不占据体积空间的质点,分子间除了碰撞外没有相互吸引力和排斥力。
在实际应用中,除在高压(p>20MPa)和极低温(T<253K)情况下需修正外,其余均可按理想气体考虑。
一定质量的理想气体,在状态变化的某一平衡状态的瞬时,有如下气体状态方程。
pv=RT(9-11)
(9-12)
(9-13)
式中p—绝对压力;
v—比容(质量体积,m3/kg);
V—气体体积;
T—热力学温度(K);
R—气体常数(J/kg·K)。
气体常数R的物理意义是把1kg的气体在等压下加热,当温度上升1℃时气体膨胀所作的功。
干空气的气体常数R=287.1J/kg·K,水蒸气的气体常数R=462.05J/kg·K。
将p,v和T称为气体的三个状态参数。
从方程(9-11)中可以看出只要其中两个参数确定就可以确定气体的状态。
9.5.2气体状态变化过程
气体(空气)作为气动系统的工作介质,在能量传递过程中其压力p、比容v、温度T三状态是要发生变化的。
实际过程是很复杂的,一般将气体由状态变化简化为有附加限制条件的四种过程,即等压过程、等容过程、等温过程、绝热过程,而把不附加条件限制,往往更接近实际的变化过程称为多变过程。
(1)等压过程某一质量的气体,在压力保持不变时,从某一状态变化到另一状态的过程,称为等压过程。
图9-3等压过程p-v曲线
如图9-3所示,设气体从状态1变化到状态2,气体在保持压力p不变的条件下,根据理想气体状态方程pv=RT可得
p1v1=RT1,p2v2=RT2
由于等压过程p1=p2,由此可得
(9-14)
或
(9-15)
式(9-14)和式(9-15)说明,压力不变时,体积(或质量体积)和温度成正比。
气体温度上升,体积膨胀;温度下降,体积缩小。
(2)等容过程气体在容积保持不变的条件下,由状态1变化到状态2,其温度由T1变化到T2,压力由p1变化到p2称为等容变化过程,等容过程的p-v曲线如图9-4所示。
图9-4等容过程p-v曲线
由于等容过程中v1=v2,所以p、v、T间的关系由下式给出
(9-16)
或
(9-17)
即压力和绝对温度成正比,气体温度随压力增加而增加,随压力下降而下降。
(3)等温过程气体在保持温度不变的条件下,由状态1变化到状态2,其压力由p1变化到p2,比容由v1变化到v2的过程称为等温变化过程,等温过程的p-v曲线如图9-5所示。
图9-5等温过程p-v曲线
由于在等温过程中,T1=T2,由气体状态方程可得
(9-18)
即等温过程中,气体压力与比容成反比。
(4)绝热过程气体在状态变化过程中,与外界无热量交换,称这种变化过程为绝热过程,绝热过程p-v曲线如图9-6所示。
图9-6绝热过程p-v曲线
图9-6绝热过程p-v曲线
在绝热过程中,气体状态参数p、v、T均为变量,将理想状态方程pv=RT微分得
pdv+vdp=RdT
(9-19)
因变化过程中无热量交换,即dq=0,由热力学第一定律可得
0=cVdT+Apdv(9-20)
式中cV—比定容热容(J/kg·K);
A—热功当量。
将式(9-20)代入式(9-21)并由cp=cV+AR,经整理得
(9-21)
式中cp—比定压热容(J/kg·K)。
令
,解微分方程(9-22)得
pvk=常数(9-22)
式中k-绝热指数,对不同的气体有不同的值,对于空气,k=1.4。
式(9-22)为绝热过程的绝热方程式。
9.5气体流动规律
在气压传动中,气体在管内流动,可按一元定常流动来处理。
当气体流速较低(v<5m/s)时,可视为不可压缩流体,气体流动规律和基本方程式形式与液体完全相同。
因此,管路系统的基本计算方法可参照液压传动中有关方法。
当气体流速较高(v>5m/s)时,在流动特性上与不可压缩流体有较大不同,气体的压缩性对流体运动产生影响,必须视其为可压缩性流体。
下面介绍在这种情况下的气体流动基本规律和特性。
9.5.1气体流动的基本方程
气体在管道中做高速流动时,其密度和温度都会发生明显变化。
对一元定常可压缩流动,除速度、压力变量外,还增加了密度和温度两个变量。
求解气体高速流动问题,必须有以下四个基本方程。
(1)连续性方程根据质量守恒定律,当气体在管道中做稳定流动时,同一时间流过每一通流断面的质量为一定值,即为连续性方程
qm=ρAV=常数(9-23)
式中qm—气体在管道中的质量流量(Kg.m3/s);
ρ—流管的任意截面上流体的密度(kg/m3);
A—流管的任意截面面积(m2);
v—该截面上的平均流速(m/s)。
对(9-24)式微分得
(9-24)
为连续性方程的另一表现形式。
(2)运动方程根据牛顿第二定律或动量原理,可求出理想气体一元定常流动的运动方程为
(9-25)
式中v—气体平均流速(m/s);
p—气体压力(Pa);
ρ—气体密度(kg/m3)。
(3)状态方程根据式(9-25),可得出气体状态方程的微分形式为
(9-26)
式中p—绝对压力;
ρ—气体的密度;
T—热力学温度(K);
(4)伯努利方程(能量方程)在流管的任意截面上,根据能量守恒定律,单位质量稳定的气体的流动满足下列方程,即伯努利方程
(9-27)
式中p—绝对压力;
v—平均流速;
H—位置高度;
hf—流动中阻力损失。
若不考虑摩擦阻力,且忽略位置高度的影响,则有
(9-28)
因气体是可以压缩的,对于可压缩气体绝热过程有
(9-29)
式(9-29)为可压缩气体在绝热流动时的伯努利方程。
与理想不可压缩流体伯努利方程比较可知,由于绝热变化使压力能增大
倍;同时由于气体重度很小,忽略位能(或势能)对气体能量的影响。
如果在所研究的管道两通流断面1、2之间有流体机械(如压气机)对气体做功供以能量Ek时,则绝热过程能量方程变为
即
(9-30)
式中p1,
 升级会员
升级会员 