旋转型灌装机械原理课程设计.docx
《旋转型灌装机械原理课程设计.docx》由会员分享,可在线阅读,更多相关《旋转型灌装机械原理课程设计.docx(12页珍藏版)》请在冰豆网上搜索。
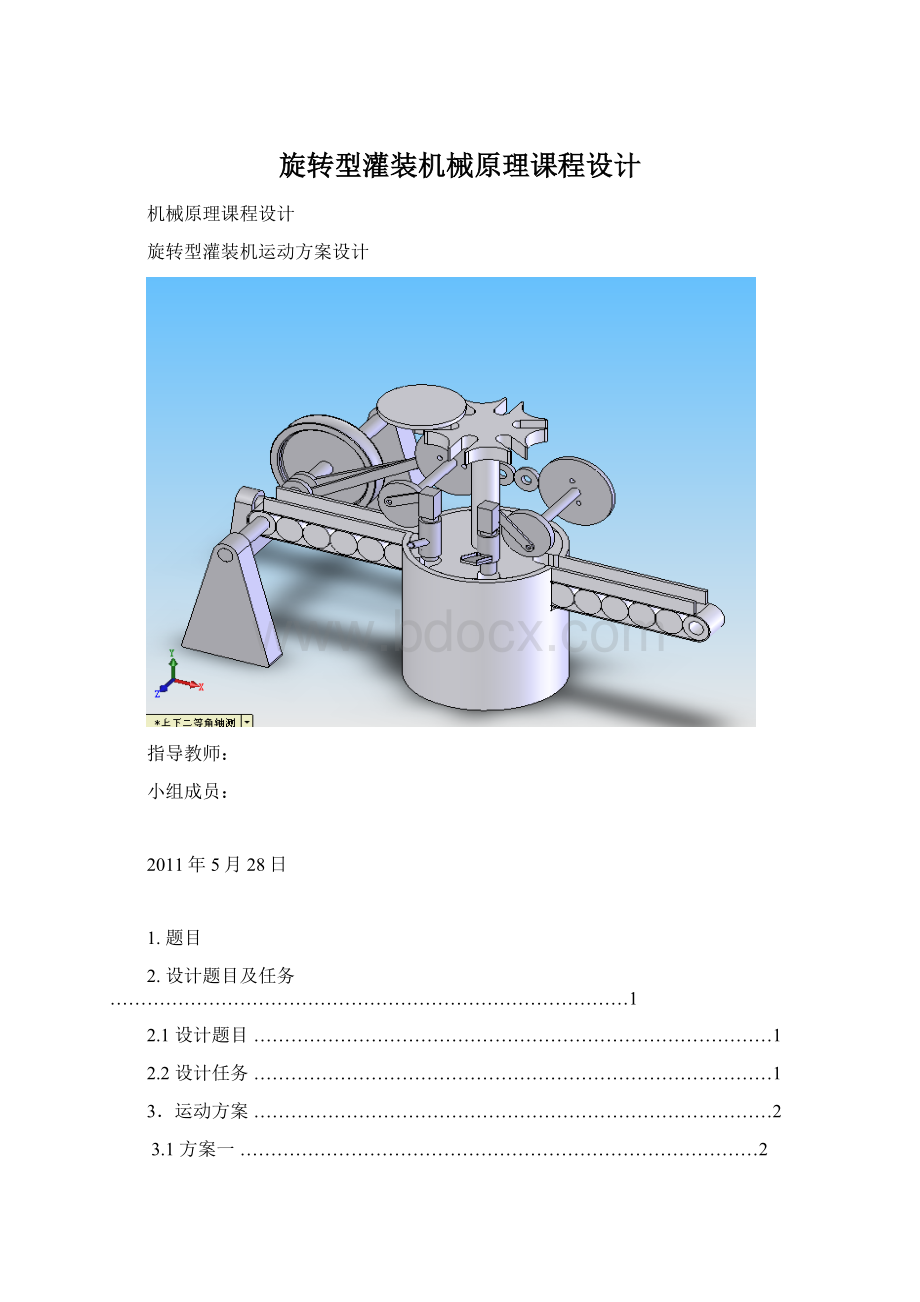
旋转型灌装机械原理课程设计
机械原理课程设计
旋转型灌装机运动方案设计
指导教师:
小组成员:
2011年5月28日
1.题目
2.设计题目及任务…………………………………………………………………………1
2.1设计题目…………………………………………………………………………1
2.2设计任务…………………………………………………………………………1
3.运动方案…………………………………………………………………………2
3.1方案一…………………………………………………………………………2
3.1方案二…………………………………………………………………………2
3.3方案三…………………………………………………………………………2
3.4凸轮式灌装机…………………………………………………………………………4
4.运动循环图…………………………………………………………………………4
5.尺寸设计…………………………………………………………………………4
5.1蜗轮蜗杆设计…………………………………………………………………………5
5.2齿轮设计…………………………………………………………………………5
5.3传送带设计…………………………………………………………………………5
5.4曲柄滑块设计…………………………………………………………………………5
5.5平行四边形机构设计…………………………………………………………………5
5.6槽轮的设计…………………………………………………………………………5
6.电算法与运动曲线图………………………………………………………………………6
6.1曲柄滑块机构运动曲线图…………………………………………………………………6
6..2平行四边形机构的运动曲线图…………………………………………………………6
7.小结……………………………………………………………………………………………8
7.2设计小结……………………………………………………………………………………8
8.参考数目………………………………………………………………………………………8
9.附图――方案一二机构运动简图
一、题目:
旋转型灌装机运动方案设计
二、设计题目及任务
2.1设计题目
设计旋转型灌装机。
在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装,封口等工序为保证这些工位上能够准确地灌装、封口,应有定位装置。
如图1中,工位1:
输入空瓶;工位2:
灌装;工位3:
封口;工位4:
输出包装好的容器。
图1旋转型灌装机
该机采用电动机驱动,传动方式为机械传动。
技术参数见表1
表1旋转型灌装机技术参数
方案号
转台直径
mm
电动机转速
r/min
灌装速度
r/min
A
600
1440
10
B
550
1440
12
2.2设计任务
1.旋转型灌装机应包括连杆机构、凸轮机构、齿轮机构等三种常用机构。
2.设计传动系统并确定其传动比分配。
3.图纸上画出旋转型灌装机地运动方案简图,并用运动循环图分配各机构运动节拍。
4.电算法对连杆机构进行速度、加速度分析,绘出运动曲线图。
用图解法或解析法设计连杆机构。
5.凸轮的设计计算。
按凸轮机构的工作要求选择从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。
对盘状凸轮要用电算法计算出理论廓线、实际廓线值。
画出从动件运动规律线图及凸轮廓线图
6.齿轮机构的设计计算。
7.编写设计计算说明书。
8.完成计算机动态演示。
2.3设计提示
1.采用灌装泵灌装流体,泵固定在某工位的上方。
2.采用软木塞或金属冠盖封口,它们可以由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在瓶口)。
设计者只需设计作直线往复运动的压盖机构。
压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。
3.此外,需要设计间歇传动机构,以实现工作转台的间歇传动。
为保证停歇可靠,还应有定位(缩紧)机构。
间歇机构可采用槽轮机构、不完全齿轮机构等。
定位缩紧机构可采用凸轮机构等。
三、运动方案
3.1方案一:
(机构简图见附图)
用定轴轮系减速,由不完全齿轮实现转台的间歇性转动。
此方案的优点是,标准直齿轮与不完全齿轮均便于加工。
缺点:
一方面,传动比过大,用定轴轮系传动时,占用的空间过大,使整个机构显得臃肿,且圆锥齿轮加工较困难;另一方面,不完全齿轮会产生较大冲击,同时只能实现间歇性转动而不能实现自我定位。
3.2方案二:
灌装与压盖部分采用如图所示的等宽凸轮,输送部分采用如图所示的步进式传输机构。
缺点:
等宽凸轮处会因摩擦而磨损,从而影响精确度;步进式传输机构在输出瓶子的时候,需要一运动精度高的拨杆。
3.3方案三:
1.如图所示,由发动机带动,经蜗杆涡轮减速;通过穿过机架的输送带输入输出瓶子;
由槽轮机构实现间歇性转动与定位;压盖灌装机构采用同步的偏置曲柄滑块机构,另外,在
压盖灌装机构中,分别设置了进料口、进盖口以及余料的出口,如上图所示。
此方案为我们最终所选择的方案。
2.优缺点分析。
优点:
蜗轮蜗杆传动平衡,传动比大,使结构紧凑;传送带靠摩擦力工作,传动平稳,能缓冲吸震,噪声小;槽轮机构能实现间歇性转动且能较好地定位,便于灌装、压盖的进行。
缺点:
在平行四边行机构中会出现死点,在机构惯性不大时会影响运动的进行;由于机构尺寸的限制,槽轮需用另外的电动机来带动。
3.4在设计过程中,曾考虑过用下图的凸轮机构作为压盖灌装机构,从而六个工位连续工作,以提高效率,但考虑到输送装置等各方面原因后,放弃了此方案。
四、运动循环图
以曲柄滑块机构的曲柄转过的角度为参考(与槽轮的导轮转过的角度相同)
工作转台
停止
转动
停止
灌装压盖机构的滑块
退
进
060120150180240300360
五、尺寸设计
5.1蜗轮蜗杆设计:
齿数
模数(mm)
压力角(0)
螺旋角
直径(mm)
蜗轮
20
25
20
14.04
100
蜗杆
1
25
20
14.04
500
5.2齿轮设计(下图所示的惰轮以及与其啮合的一对齿轮)——采用标准齿轮
模数(mm)
压力角(0)
齿数
直径(mm)
齿轮1
5
20
20
100
齿轮2
5
20
60
300
5.3传送带的设计
速度:
V=wr=72r/min*50mm
每两个瓶子之间的距离S:
t=S/v=1/(w1/6)其中w1为转台的角速度12r/min
解得:
S=50mm
5.4曲柄滑块机构的计算
由机构整体尺寸,行程为137mmm,行程速比系数K=1.4偏心距为50mmm具体设计过程见图解法
5.5平行四边形机构的设计
由于已知曲柄长度为50mm,连架杆长度为706.61mm,由平行四边形定理可得出该机构的尺寸。
5.6槽轮的设计
L=450mmΨ=30∴R=LsinΨ=225mms=LcosΨ=389mm
h≥s-(L-R-r)=130mmd1≤2(L-s)=60mmd2﹤2(L-R-r)=100mm
其中L为中心距圆销半径r=30mmd1为拨盘轴的直径d2为槽轮轴的直径
六、电算法与运动曲线图
6.1曲柄滑块机构运动曲线图
滑块的位移分析
滑块的速度分析
滑块的加速度分析
由上述运动曲线图知:
该机构具有急回特性,由加速度曲线知,该机构冲击较小。
6.2平行四边形机构的运动曲线图
对A点进行位移、速度、加速度分析:
A点的加速度曲线
位移曲线
速度曲线
由上述曲线可以看出,平行四边形机构在运动过程中,为匀速运动,加速度会发生突变,因而存在着冲击。
七、小结
7.1方案简介
在整个系统运用到了蜗杆蜗轮机构,槽轮机构,偏置曲柄滑块机构等常用机构。
完成了从瓶子的传输到灌装,压盖,最后输出的机器。
旋转型灌装机,是同时要求有圆盘的转动,曲柄滑块机构的运动和传送带的传送的机构。
圆盘间歇转动部分:
因为在系统的原始要求中需要有间歇转动的特性,而工位为6个,所以在其中首先引入了可以实现间歇转动的典型机构——槽轮机构。
且槽轮机构的转动速度是圆盘转速的6倍,并且在转动时分别在6个工位进行停歇。
灌装封口急回部分:
灌装和风口虽然为两个工位,但其的运动特性是一样的,只是有一个时间的差值而已。
而我们学过的有急回特性的最典型且简单的机构就是偏置曲柄滑块机构。
因为圆盘的转动为12r/min,而每一转有6个瓶子需要进行灌装和封口的工序,所以需要曲柄的转速也为72r/min。
所以曲柄与发动机的传动比就为20:
1,所以其前面的轮系传动只需要完成传动从1440r/min到72r/min的变化,所以,在这之后用了蜗杆蜗轮机构将其传动比直接变为20:
1。
但由于在这两个位置的方向问题,两个偏置曲柄滑块为反方向的运动。
因为这样,又在两个曲柄之间添加了两对小的齿轮副,以实现其方向的转换。
7.2设计小结
在真正开始设计这个机构之前,我们曾经有过很多想法,有些很幼稚,甚至不能算是机械专业的学生设计的方案,有些又过于复杂,只能想出来,却很难实现。
这次课程设计,是我们第一次将本学期《机械原理》这门课程中所学的知识综合运用到实际中,另外对于机械设计也有了初步的认识。
这次课程设计,我们用了一个多月的时间,从最初的毫无头绪到逐渐做出雏形,然后进一步改进。
在这整个过程中,我们在实践中摸索成长,同时也更加清晰地认识到只有认真地掌握好理论知识,在实际应用才能够得心应手。
八、参考资料
1.《机械原理》(第六版)孙桓陈作模主编高等教育出版社
2.《机械设计课程设计》(第二版)朱文坚黄平编华南理工大学出版社
3.《机械设计基础课程设计》孙德志张伟华邓子龙编科学出版社
4.《机械设计与理论》李柱国主编科学出版社
5.《机械设计课程设计》朱家诚主编合肥工业大学出版社
 升级会员
升级会员 