真空助力器原理及性能参数计算.docx
《真空助力器原理及性能参数计算.docx》由会员分享,可在线阅读,更多相关《真空助力器原理及性能参数计算.docx(19页珍藏版)》请在冰豆网上搜索。
真空助力器原理及性能参数计算
一、单滑体式真空助力器工作原理
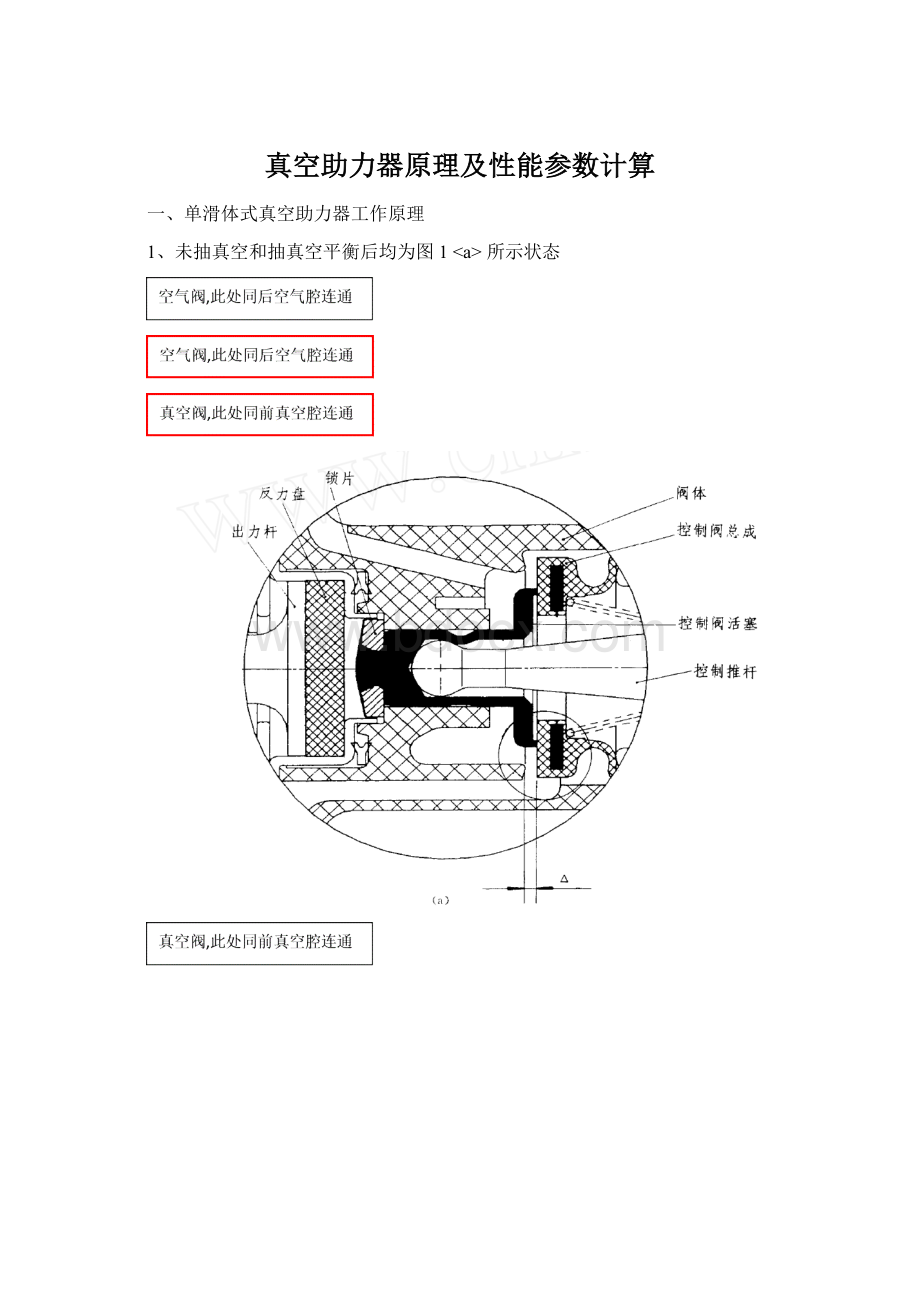
1、未抽真空和抽真空平衡后均为图1所示状态
2、当缓慢推动控制推杆,控制阀活塞与控制阀总成前行Δ后,真空阀口关闭,控制阀活塞与控制阀总成分离,大气阀口打开如图1所示.
3、助力器的后腔进入一定量的大气,使前后腔形成一定的压差,当压差对动力缸产生的推力大于动力缸回位簧预紧力时,便在助力器出力杆<也叫助力器推杆>产生输出力,同时该力的反力使反力盘变形,如果此时反力盘的变形尚未消除反力盘与控制阀活塞之间的间隙,则在输入力<控制阀内、外弹簧预紧力的合力>几乎不变的情况下,大气阀口继续打开,随着后腔的大气不断进入,前后腔压差随之增大,输出力增大,反力盘的变形也大了,直到反力盘与控制阀活塞之间的间隙消除,此时输出力的反力以等压强传递原理按一定比例<这个比例即为静特性曲线中的助力比.根据压强传递原理,助力比=出力杆座面积/控制阀活塞头部面积>传到控制阀活塞上,使控制部分处于图1所示的动平衡状态.
4、这个状态随着输入力的增大一直维持到静特性曲线的最大助力点<此点两腔压差达到最大>.随着输入力的继续增大,动平衡状态被打破,控制部分处于图1所示状态,此时输出力与输入力等量变化.
5、撤去输入力,助力器又回到图1所示状态.
锁片定位单阀体式真空助力器工作原理
1、在未抽真空时,控制部分如图2所示,此时由于动力缸弹簧的压力促使锁片将控制
阀活塞向前"推动〞,使控制阀活塞与控制阀总成分离,空气阀打开,真空关闭.
2、当抽真空时,前腔形成一定真空度,后腔仍处于常气压状态.随着压差增大,其
产生的推力克服了动力缸回位簧的预紧力时,动力缸部分向前移动,形成了图2所示状态,使前后腔同时处于抽真空状态.当两腔压差缓和到仅能克服动力缸回位簧预紧力时,动力缸部分在回位簧作用下后移,形成图2所示平衡状态.
3、当缓慢推动控制推杆时,大气阀立即打开<故该结构助力器的空行程为零,这就是锁片定
位单阀体式真空助力器与单阀体式真空助力器相比在性能上的优越之处>.这以后它的工作过程与单阀体式结构相同.
二、特性曲线与参数介绍
1、最大助力点:
最大助力点在规定的真空条件下测得.
2、升压曲线同降压曲线:
FaEZ为升压曲线,Fa1E1Z为降压曲线.
3、输入力为最大助力30%的输出力,输入力为最大助力80%的输出力,通过这两点计算助力比的值较准确.
4、助力器滞后率,当助力器输出力为最大助力的50%时,对降压曲线上的E0.5min与升压曲线上的E0.5max,E0.5min/E0.5max称为滞后率.
5、跳跃值,跳跃值的大小取决于空气阀座同反馈盘之间的间隙.
6、释放力,释放力是保证助力器装配有一定的预紧力,保证助力器能够完全回位,一般应大于30N.
三,性能计算
1.反馈盘式真空助力器的力平衡方程式
根据上述的理论分析,可列出当助力器工作时处于"双阀关闭〞的平衡状态时的力平衡等式为:
FP=FR+PO〔A1–A2〕+P〔A2–A3〕+〔P–P0〕A4–F1 〔1〕
式〔1〕中
FP——助力器的输出力;
FR——阀杆输入力;
PO——真空腔与大气腔间的压力差;
A1——助力器有效作用面积;
A2——阀体柄部截面积;
A3——主缸推杆柄部截面积;
A4——空气阀座密封面截面积;
P——真空腔的真空度;
F1——回位簧抗力.
P1——真空腔的绝对气压值
P2——空气腔的绝对气压值
P3——标准大气压力值
说明:
P1为真空腔的绝对气压值,P2为空气腔的绝对气压值,P3为标准大气压力值,所以真空腔的真空度等于:
P=P3-P1,真空腔同空气腔之间的压力差等于:
P0=P2-P1
FP=FR+PO〔A1–A2〕+P〔A2–A3〕+〔P–P0〕A4–F1
=FR+〔A1–A2〕+〔A2–A3〕+A4–F1
=FR+〔A1–A2〕+〔A2–A3〕+<->A4-F1
=FR+PO〔A1–A2〕+P〔A2–A3〕+〔P–P0〕A4–F1
式〔1〕可转化为:
FP=FR+POA1+〔P–P0〕〔A2–A4〕–PA3–F1 〔2〕
由〔2〕式可以看出当压力差PO增加至最大即〔PO=P〕,阀杆输入力FR不再增加时,助力器输出力FP达到最大助力点〔见图3特性曲线1〕,此时的回位簧抗力为F1,则助力器在最大助力点时的力平衡等式为:
FP=FR+P〔A1–A3〕–F1 〔3〕
当真空腔的真空度P为80kPa时,则真空腔与大气腔的气压差为〔0~80〕kPa.因此,随着大气腔的真空度的下降,大气压力作用于空气阀座产生的输入力Fk=〔P–Po〕A4与阀体柄部所影响的输入力也越来越小直至下降为零达到最大助力点,其二者变化规律均为减函数.回位簧〔9〕抗力随着阀体前移而逐渐增加,其变化规律为增函数.为此在达到助力点之前,如果将上述互为反函数的变化值视为近似相等时,则回位簧抗力F1可视为定值.
助力器的伺服力Fv=P〔A1–A3〕〔4〕
在阀杆输入力FR中,一部分输入力用来克服阀杆回动簧的抗力F2,则有效输入力为FRY为:
FRY=FR-F2 〔5〕
伺服力产生的助力除部分用来克服回位簧的抗力F1外,还要承受阀杆回动簧的抗力F2之后才作用在反馈盘上,为此作用在反馈盘上的有效伺服力FVY为:
Fvy=P〔A1–A3〕–F1+F2〔6〕
将式〔5〕、〔6〕带入式〔3〕得:
Fp=FRY+FVY 〔7〕
根据平衡状态时的受力分析,反馈盘的内圈所承受的有效输入力FRY的压强与外圈所受的有效伺服力FVY的压强相等时,助力器处于"双阀关闭〞的平衡状态,可列如下等式:
〔8〕
真空助力器的伺服比计算
助力器的伺服比IV是指有效伺服力FVY与有效输入力FRY的比值,可通过等式〔8〕转换表示:
〔9〕
真空助力器的助力比计算
助力器的助力比It为助力器的输出力Fp与有效输入力FRY的比值,根据等式〔7〕和〔9〕可得出:
〔10〕
真空助力器的特性曲线方程
考虑到助力器在实际工作过程中,由于相关零部件的摩擦阻力的存在.为此,通常助力器的工作效率为η=0.85~0.95,所以式〔2〕变化为:
Fp=[FR+P0A1+–PA3–F1]×η〔11〕
式〔3〕变化为:
Fp=[FR+P–F1]×η〔12〕
当助力器的输出力超过最大助力点时,由于真空度P为定值,则P为常数,输出力FP与输入力FR为线性递增变化.因此式〔12〕可用来计算最大助力点之后的输出力的值.
由等式〔7〕考虑助力器效率可得:
Fp=×η 〔13〕
由等式〔9〕可得:
FVY=FRYIV 〔14〕
由等式〔10〕、〔5〕可得:
Fp=FRYItη=Itη 〔15〕
式〔15〕表明,当输入力FR≥F2 时才能产生输出力.因此,最小输入力〔始动力〕Fa的等式为:
Fa=F2 〔16〕
当助力器处于非工作状态时,真空腔与大气腔的气压差P0为零,由式〔11〕可得:
Fp=[FR+P–F1]×η=0 〔17〕
根据式〔17〕可得出:
FR=F1 –P 〔18〕
因为FR≥0
所以F1≥P〔19〕
根据式〔19〕可知,回位簧装配抗力与真空腔的真空度、阀体柄部截面积A2、主缸推杆柄部截面积A3和空气阀座密封面截面积A4有关.只有当式〔19〕成立时,助力器才不会出现自放大的失效模式即输入力为0时产生输出力,阀体才能压紧锁片〔12〕并靠在助力器的后壳体铆接部件〔2〕上.
当助力器在无真空状态下工作时,P=P0= 0,
式〔11〕变化为:
Fp=×η〔20〕
根据式〔20〕可知,无真空时所需最小输入力〔始动力〕Fb的等式为:
Fb=F1 〔21〕
特性曲线的跳跃值三角区
真空助力器的输入——输出特性曲线如图1所示.
由图可见,由输入力的最小始动值Fa1与最大始动值Fa2为起点的特性曲线L1、L2构成的区间,是助力器的特性允许X围.当输入力由0增至最小始动值Fa1之前,输出力Fp为0,而当输入力增至最小始动值Fa1时,输出力则出现跳跃值.由FPT1、FPT2、Fa1、Fa2所围成的三角区即称为跳跃值三角区.特性曲线的起始点越靠近Fa1,其跳跃值越大.越靠近Fa2,其跳跃值越小.可根据不同的产品与客户要求,通过调整压块与反馈盘的间隙来调整跳跃值的大小.但过大的跳跃值会使助力器内部零件过早地磨损,使用寿命大大降低.
特性曲线的偏移
由于助力器的输入输出特性曲线不是从零点开始的,而且其延长线也不一定通过坐标原点,因此特性曲线出现了偏移.根据式〔5〕、〔15〕可得:
FP=FRYItη=FRItη–F2Itη 〔22〕
式〔22〕的斜率为:
K=Itη
截距为:
b= – F2 Itη
最大助力点后输出力等式〔12〕可变化为:
Fp=[FR+P–F1]η=FRη+[P–F1]η 〔23〕
式〔23〕的斜率为:
K1=η
截距为:
b1=[P –F1]η
根据式〔22〕、〔23〕绘制特性曲线如图2所示,两条曲线的交点为最大助力点.
由于在输入力为Fa1时输出力具有最大跳跃值FPT1,则输出力为FP1:
Fp1`=FR1Itη1–Fa1Itη1 +FPT1 〔24〕
Fp1`是在真空度为允许值的最上限、效率为最大值η1时的特性曲线偏移后的最大助力点时的输出力,与其对应的FR1输入力是偏移后的输入力,如图1中L1所示.当输入力为最大始动力Fa2`时输出力具有最小跳跃值FPT2`,则输出力FP2`为:
Fp2=FR2Itη2–Fa2Itη2+FPT2〔25〕
Fp2是在真空度为允许值的最下限、效率为最小值η2时的特性曲线偏移后的最大助力点时的输出力,与其对应的FR2输入力是偏移后的输入力如图1中L2所示.
以东风标致206反馈盘式真空助力器为实例,我们可以绘制其特性曲线.
1、助力器的结构尺寸
〔1〕助力器有效作用直径:
φ224.45+0.2mm;
〔2〕阀体柄部直径:
φ40mm;
〔3〕主缸推杆柄部直径:
φ90mm;
〔4〕空气阀座密封面直径:
φ21.3+0.05mm;
〔5〕主缸推杆与反馈盘的最大作用直径:
φ25.950mm;
〔6〕压块与反馈盘的最大作用直径:
φ10.90mm.
2.助力器的相关参数
〔1〕真空腔的真空度:
P=〔0.08±0.001〕MPa;
〔2〕回位簧装配抗力:
F1=〔145±15〕N;
〔3〕阀杆回动簧装配抗力:
F2=116.3+6.5 N;
〔4〕伺服比:
IV=4.7±0.05;
〔5〕助力比:
It=5.7±0.05;
〔6〕伺服力作用面积:
A1–A3=〔383±1〕cm2;
〔7〕伺服力:
FV=P〔A1–A3〕=〔3064.1±46.3〕N;
〔8〕有效伺服力:
FVY=P〔A1–A3〕–F1+F2=〔3035.1±67.3〕N;
〔9〕始动力:
Fa=F2+FK=〔88.4±6.7〕N,取Fa=〔80±30〕N;
〔10〕跳跃值:
FPT=〔350±120〕N;
〔11〕由η=0.88~0.93;
 升级会员
升级会员 