ABB机器人高级编程.docx
《ABB机器人高级编程.docx》由会员分享,可在线阅读,更多相关《ABB机器人高级编程.docx(14页珍藏版)》请在冰豆网上搜索。
ABB机器人高级编程机器人高级编程ABB机器人-高级编程6.8高级编程6.8.1.映射程序、模块或例行程序映射映射可在特定的映射面上创建程序、模块或例行程序的副本。
映射功能可以应用于任何程序、模块或例行程序。
映射可以通过两种不同的方法完成:
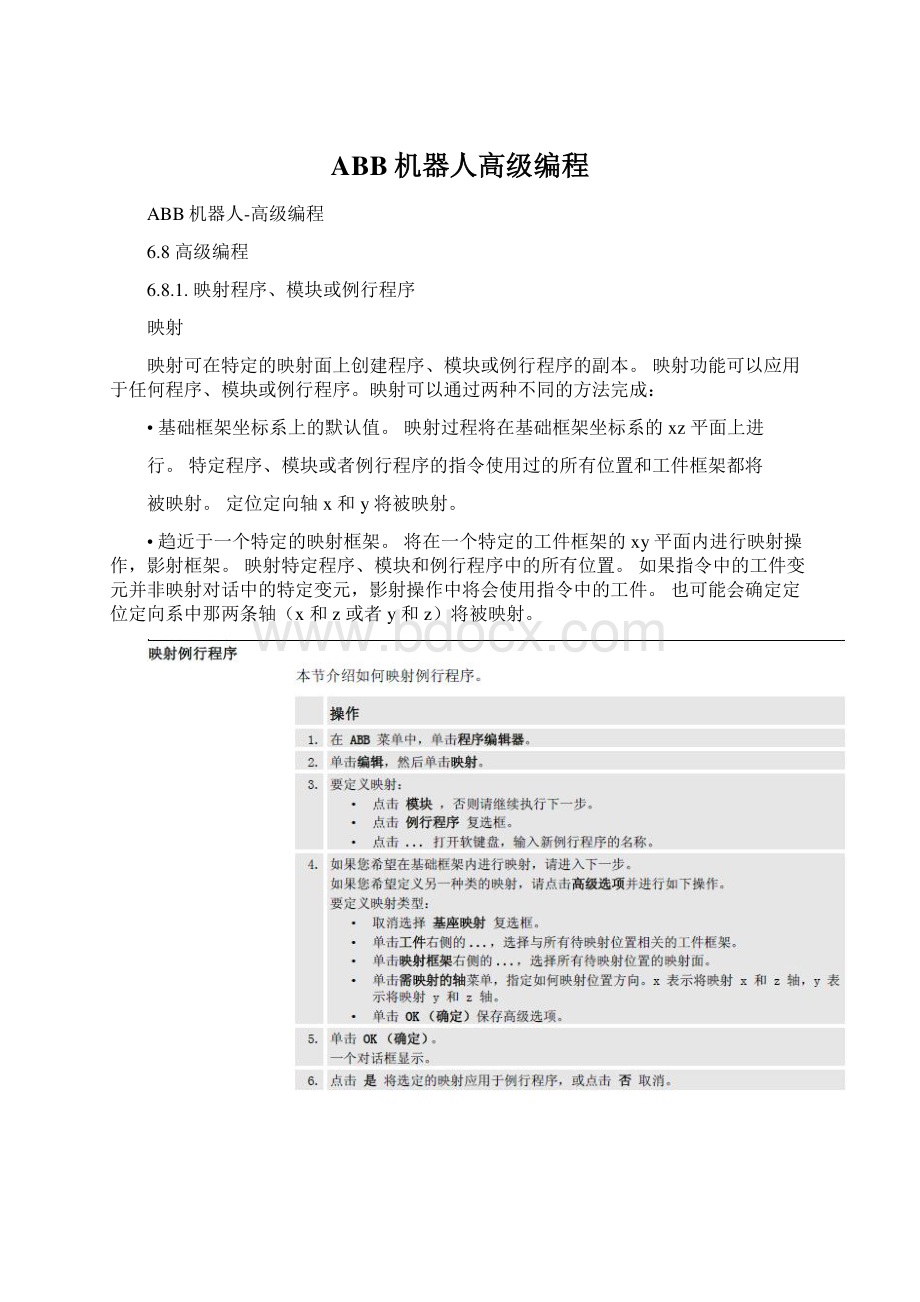
基础框架坐标系上的默认值。
映射过程将在基础框架坐标系的xz平面上进行。
特定程序、模块或者例行程序的指令使用过的所有位置和工件框架都将被映射。
定位定向轴x和y将被映射。
趋近于一个特定的映射框架。
将在一个特定的工件框架的xy平面内进行映射操作,影射框架。
映射特定程序、模块和例行程序中的所有位置。
如果指令中的工件变元并非映射对话中的特定变元,影射操作中将会使用指令中的工件。
也可能会确定定位定向系中那两条轴(x和z或者y和z)将被映射。
6.8.2.修改和调节位置概述位置是robtarget或jointtarget数据类型实例。
只要您在软键盘上输入偏移值就可以通过HotEdit调节位置。
偏移值与位置初始值一起使用。
您也可以利程序编辑器或运行时窗口中的修改位置功能进行位置修改,将机器人步进或微调至新位置。
位置的修改值将覆盖初始值。
注意更改预设位置可能会显著改变机器人移动模式。
请始终确保任何更改考虑到设备和人员的安全。
数组中的位置当位置被列为数组时,根据数组在移动指令中的索引方式,修改或调节的步骤可能稍有不同。
注意:
jointtargets只能使用程序编辑器以及运行时窗口中的修改位置方法进行修改,而不能使用HotEdit修改。
附注您的系统可能在位置修改方式上受限。
您可以使用系统参数(主题Controller,类型ModPosSettings)对距离进行限制,并限制哪些位置可使用UAS修改。
6.8.3.在程序编辑器或运行时窗口概述6.8.4.利用HotEdit调节位置概述HotEdit是对编程位置进行调节的一项功能。
该功能可在所有操作模式下运行,即使是在程序运行的情况下。
坐标和方向均可调节。
HotEdit仅用于已命名的robtarget类型位置(请参见以下限制)。
HotEdit中的可用功能可能会受到用户授权系统(UAS)的限制。
应用调节过的位置点击应用后,调节值将直接被正在执行的程序使用。
如果调节发生在程序或动作指针附近,则难以预测调节更改将何时生效。
因此,在程序运行的情况下如果应用偏移值,则务必要确定机器人在程序中的所处位置。
但是,新值只有在应用了提交命令之后才能储存于基准中。
基准概念基准可定义为测量未来更改的参照。
基准概念能够取消任何调节操作并恢复至最近基准存储的位置值。
使用恢复命令即可执行此项操作。
执行提交命令后,新的偏移值将更新基准,而旧值将从程序内存中删除。
使用基准菜单应用或拒绝调节。
恢复选项将放弃对当前选定位置的所有调节,将其恢复至最新的基准值,这意味着位置偏移值将为0,0。
恢复整个程序将放弃自最近一次执行提交命令以来对编程位置作出的所有调节。
这可能包含了对于同一任务的多个HotEdit会话。
如果系统使用的是AbsoluteLimitModPos,所有修改位置命令也将从程序编辑器中撤销。
提交选项将会把当前选定位置的偏移值应用到基准。
提交整个程序将应用对编程位置的所有调节。
这可能包含了对于同一任务的多个HotEdit会话。
如果系统使用的是AbsoluteLimitModPos,它还包括在程序编辑器中执行的修改位置。
基准目标标准满足以下所有标准的目标都属于基准的一部分:
数据类型必须是robtarget或jointtarget不得在例行程序中进行局部声明不得在目标数组中进行声明基准概念图例下图解释了基准的概念并描述了点的移动、恢复和提交。
从原始基准(A)开始,点移动(B)两次。
如果您后悔作出更改,可以选择执行恢复命令(C)。
但是如果您继续移动该点,然后执行提交命令(B+D),则将建立新基准(E),届时将无法恢复至原始基准。
如果再移动一次,然后恢复,则该点将移回至最新的基准(E)。
恢复选项或恢复整个程序下例显示了恢复选项和恢复整个程序到原始状态之间的差异。
提交选项和提交整个程序的区别与此类似。
外部轴的HotEdit如果外部轴在至少一个选定的robtarget中启动,可使用HotEdit来调节外部轴。
只调节带活动值的轴。
限制HotEdit只可能对指定的robtarget进行调节(比如,p10和p20)。
(*树形图中不显示robtarget。
)在HotEdit中,只能对声明为数组并以某一数字为索引的robtarget进行修改。
只有当目标是基准的一部分时,才能对其进行HotEdit调节。
如果目标不是基准的一部分,将不会在HotEdit树形图中显示,因为这些目标无法被选中来加以调节。
这表明在例行程序中被声明的目标将不能获得显示。
HotEdit调节仅适用于robtargets。
(只有通过程序编辑器中修改位置才能调节Jointtargets。
)如果系统使用的是AbsolutelimitModPos,这些jointtargets仍然是基准的一部分,但是如应用了恢复整个程序或提交整个程序后,它们将受到影响。
在HotEdit中使用UASUserAuthorizationSystem可用于限制HotEdit功能,仅允许用户编辑预先选定的位置。
要加载这些位置,可点击文件,然后点击打开选项。
然后可按常规方式调节选定位置。
6.8.5.处理位移与偏移值有关位移有时,会在若干位置对同一对象或若干相邻工件执行同一路径。
为了避免每次都必须为所有位置编程,可以定义一个位移坐标系。
此坐标系还可与搜索功能结合使用,以抵消单个部件的位置差异。
位移坐标系基于工件坐标系而定义。
选择位移方法最佳位移方法随位移使用方式、使用时间及使用频率可能各不相同。
移动工件如移动或偏移工件的频率不高,则可适当移动工件。
偏移工件工件由用户框架和工件框架组成。
两个框架可单独移动,也可同时移动。
如果同时移动两个框架,整个工件就会被移动。
此操作可用于使工件框架偏离于用户框架(例如,一个固定装置用于多个工件时)。
这样就能保留用户框架,仅仅偏移工件框架了。
偏移与旋转工件如果位移在x、y、z中,您可能想要偏移和旋转工件框架,使其偏离用户框架。
要在x、y、z中进行偏移,可使用上述同样方法。
有关偏移值定义一个位置作为偏离指定位置的偏移值有时更为容易。
例如,如果您知道某工件的具体尺寸,则只需移至一个位置即可。
偏移值根据工件在x、y、z方向上的位移距离设定。
例如:
MoveL(p10100500)v50.使用下列表达式定义该位置的偏移值:
1.原始位置/起点2.在x方向上的位移3.在y方向上的位移4.在z方向上的位移范例此范例显示移动指令,包括使机器人沿正方形移动的偏移值(顺时针),从p10开始,在x和y方向上均有100mm位移。
MoveLp10,v50.MoveL(p1010000)v50.MoveL(p101001000)v50.MoveL(p1001000)v50.MoveLp10,v50.6.8.6.将机器人移至编程位置位置机器人程序通常包含编程位置。
机器人可使用微动控制菜单中的功能自动移至编程位置。
机器人以250毫米/秒的速度移动。
危险自动移动机器人时,其手臂可能会在没有任何警告情况下移动。
请确保无人进入保护空间,且当前位置和编程位置之间无任何物体。
将机器人移至编程位置,本步骤介绍如何将机器人自动移至编程位置。
6.8.7.对准工具概述工具可用其它坐标系对准。
对准工具时,工具的z轴应该对准选定坐标系最近的轴。
因此建议首先将工具移到靠近所需坐标的位置。
注意,工具数据不可更改!
对准机械单元,本步骤介绍如何对准工具。
6.8.8.编辑指令表达式和声明表达式表达式指定数值的评估。
例如,它可以用作:
IF指令中的状态指令中的变元功能调用中的变元声明和数据类型编辑表达式时,可使用新建显示软键盘并更改数据类型名称。
新建数据声明本步骤介绍如何新建指令表达式中的数据声明。
更改数据类型本节介绍如何更改数据类型。
6.8.9.隐藏程序代码中的声明声明可隐藏程序声明,以便于读取程序代码。
隐藏声明本节介绍如何隐藏或显示声明。
操作1.在ABB以显示声明。
程序编辑器以查看程序。
2.点击隐藏声明以隐藏声明。
点击显示声明。
6.8.10.从内存中删除程序概述在任务里删除程序并不是从控制器海量存储器,而是从程序内存中删除程序。
当切换程序时,先前使用的程序将从程序内存中被删除,但不从它所保存的海量存储器中删除。
从内存中删除程序本节详细介绍如何从程序内存中删除程序。
6.8.11.从硬盘中删除程序概述程序通过FlexPendant资源管理器或FTP客户端删除。
从控制器硬盘删除程序时,程序内存中当前加载的程序不会受到影响。
使用FlexPendant资源管理器删除程序可使用ABB菜单上的FlexPendant资源管理器删除程序。
6.8.12.启动机械单元概述机械单元可能是活动的或非活动的。
执行程序时仅能运行活动单元。
不运行停用单元。
这在程序进行编程或测试时非常有用。
机器人不能。
启动功能不影响微动控制。
要选择微动控制的机械单元,请使用微动控制菜单中的机械单元属性。
 升级会员
升级会员 