Contextcapture建模流程修订版V30.docx
《Contextcapture建模流程修订版V30.docx》由会员分享,可在线阅读,更多相关《Contextcapture建模流程修订版V30.docx(42页珍藏版)》请在冰豆网上搜索。
Contextcapture建模流程修订版V30
Contextcapture建模流程
初学篇
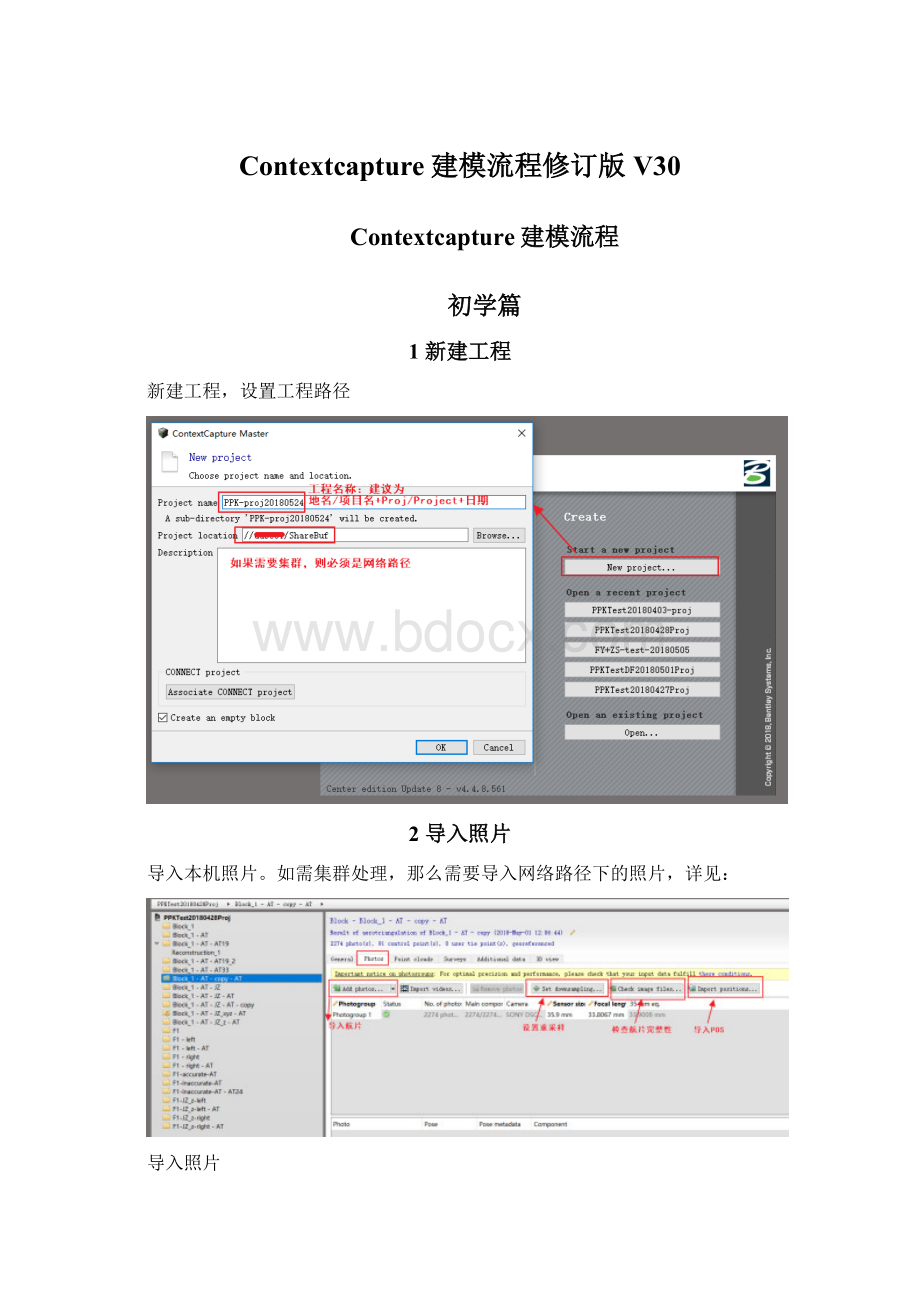
1新建工程
新建工程,设置工程路径
2导入照片
导入本机照片。
如需集群处理,那么需要导入网络路径下的照片,详见:
导入照片
Setdownsampling〔设置采样率〕:
该参数只会在空三的过程中对照片进展重采样空三,建模时仍旧使用原始分辨率影像。
Checkimagefiles...〔检查航片完整性〕:
建模失败的时候可以用此功能进展数据完整性检查。
Importpositions...〔导入POS〕:
导入POS格式如下,
a.如果有多个照片组〔Photogroup〕那么必须保证每个照片组中的照片名称唯一,否那么会导入失败;
b.POS路径必须为英文;
相机参数
每个照片组〔Photogroup〕都会有一个相机参数,可以在右键菜单中导入或导出相机检校参数〔特别对CC4.4以后版本有用〕。
3空中三角测量
空三参数设置,如第一次使用,那么建议直接按照默认参数,只需“下一步
〞即可,如欲了解其中参数意义那么进入如下内容:
〔1〕设置名称,最好根据飞行架次或工程信息进展设置
〔2〕参与空三的照片,默认使用全部照片。
(3)照片定位或地理参考设置
(4)空三参数设置,通常默认参数即可
a.对于地名拍摄照片,可能会修改“Keypointsdensity〞、“Pairselectionmode〞、“Componentconstructionmode〞三个选项;
b.对于航空拍摄照片,通常使用默认参数,如果多个架次且存在航高不一致的情况,那么可能会修改“Pairselectionmode〞、“Componentconstructionmode〞两个选项;〔实例:
百里峡漂流两个架次航高不一致〕
(5)空三检查
1首先保证General选项卡中显示Georeferencing情况的空三结果,才能进展建模操作。
2然后在特征点的三维视图中检查又没有明显的分层或穿插现象
Ø主要查看航片有没有穿插;
Ø特征点在道路或房屋区域有没有分层;
Ø检查像控点又没的平面和高层误差是否过大;
检查航片位置
检查像控点误差
3.2空三刺点〔在航片上刺地面像控点〕
Ø导入像控点
导入像控点之前需要先选择坐标系,此次坐标系更加像控点的坐标系进展选择,如果像控点使用的是地方坐标系,个人建议使用局部坐标系笛卡尔〔cartesian〕坐标系。
导入像控点
Ø刺点
选择坐标系并刺点
注〔个人观点〕:
刺点一般尽量分布在多个航带的照片上,每个航带刺点数量不少于9张,假设是边缘点或者某些航线照片较少可以低于此标准,一般不低于3张。
Ø导出空三
导出已完成空三
Ø导入空三
导入其他已完成空三
4模型重建
然后在空三结果中开启一个重建,使用“General〞选项卡中右下角的“Newreconstruction〞按钮,如以下图
新建reconstruction
新建reconstruction后
建模开场之前,必须进展建模参数设置,如以下图所示,为建模之前必须设置的参数。
建模参数设置
4.1.1设置坐标系〔初学直接略过〕
对于空三后在General选项卡中显示Georeferencing情况的空三结果,才可以在建模时设置坐标系。
以及进展地理坐标〔大坐标〕的像控点刺点工作。
对于空三后显示的为relative和absolute状态的块,那么只能使用小坐标〔四位整数以内〕的坐标进展刺点,此时时不支持国家地理坐标的。
参数设置概览
选择坐标系
注:
此处建议工程成果坐标系或ENU坐标系。
搜索坐标系
4.1.2设置建模范围〔初学可以略过〕
根据视图中的空三结果修改需要建模的区域。
〔1〕使用软件自带的工具修改建模范围,以及导入KML进展修改;
使用软件自带工具修改建模范围前
使用软件自带工具修改建模范围后
(2)使用第三方软修改建模范围
a.在块中输出空三结果中的照片位置为KML文件;
b.使用GlobalMapper软件翻开该KML文件,根据照片位置勾绘多边形,导出为KML格式;
c.导入在GlobalMapper软件中勾绘的多边形;
分块大小设置:
设置好瓦片划分模式及瓦片大小后,需要注意内存使用大小〔ExpectedmaxiumRAMusageperjob〕不超过24G〔计算机内存32G〕。
此处的内存使用大小是根据空三完成后的特征点数量进展计算的,由于CC4.4以后的版特征点数量大幅下降以及有些区域特征点本身较少的原因,因此推荐以参与建模的照片数量来确定瓦片数量。
瓦片划分建议参考位置
〔1〕使用规那么瓦片
〔2〕使用不规那么瓦片
此功能在4.3以后版本中增加,主要由于现阶段局部平台对该种瓦片划分方式支持较差以及数据后处理难度较大,为保险起见,当前建议不使用该种瓦片划分方式。
选择Reconstruction1,点击General选项卡中的“Submitnewproduction〞按钮。
提交产品
建议工程或数据名称+格式组合
4.2.2确定生成的产品类型〔初学,使用默认〕
选择产品类型
4.2.3确定生成的产品格式〔初学,使用默认〕
选择产品格式
4.2.4确定产品的坐标系及平移量〔初学略过〕
选择坐标系
注:
如上图所示,为生成产品的过程中进展的坐标系选择,如果希望OSG模型能直接导入Skyline平台那么:
a.使用默认的ENU坐标系;b.导入时取消导入第二个选项中的.xml文件,导入成功后再到“Output〞文件夹立面修改LODTreeExport.xml文件中的坐标系信息。
设置原点〔如果一个工程分几个区域建模,同时又希望使用S3C_Composer建立索引时可以修改〕
4.2.5再定义产品的范围〔初学略过,非紧急任务也可略过〕
此功能可以作为在节点足够的情况下加快建模速度的一个方式,对于需要生成正射影像的工程,不建议在此重新定义范围,否那么会导致正射影像生成不完整。
最好采用4.1.2中的方法设置产品生成范围。
通过鼠标选择分块
提交产品
提交状态
5开启引擎
1、检查工程中配置的发布任务路径〔便于各节点到改路径读取任务〕
工程中配置Engine工作路径
2、每个节点使用CCSeting设置引擎读取任务的路径,需要和工程的中发布的任务路径一样。
CCSeting中设置Engine路径
3、翻开引擎
引擎最终的执行任务角色,它会根据本节点计算机中CCSeting中设置的路径,到改路径下领取任务并执行。
进阶篇
6集群配置
6.1文件共享方法〔路径配置——工程及Jobs均需设置为共享路径〕
〔1〕文件共享设置
〔2〕共享文件的密码保护设置〔共享文件夹后,其它机器访问时仍需要密码,可通过以下方式修改〕
翻开“网络和共享中心〞
1照片路径设置
一定要导入共享路径下的照片,保证照片来自网络路径。
导入网络路径照片
2使用工程发布新建及设置工程,以及发布任务〔Jobs〕
3各节点机器中通过CCSeting设置本机执行任务〔Jobs〕的位置,然后开启个节点的机器执行任务
7提升空三成功率
7.1方法一:
软件版本选择
大概的空三效果比照4.0>4.2>4.4.0>4.1>4.3〔此次为个人经历,未作论证〕,4.4.6以后版本在空三中引入集群处理方式,但初步测试效果弱于4.4.0。
优点是新版本速度快。
7.2方法二:
修改空三参数
〔1〕空三参数设置中,关于“Componentconstructionmode〞参数的应用,“One-pass〞和“Multi-pass〞不同的空三效果〔针对某些架次之间空三不好时的情况,和局部照片位入网的情况〕。
图7-1空三参数详细设置
图7-2使用“One-pass〞进展空三后的结果〔使用照片自带GPS定位信息〕
图7-3使用“Multi-pass〞进展空三后的结果〔使用照片自带GPS定位信息〕
(2)导入相机参数
为每个照片组分别导入相机检校参数,
a.如果已经进展过相机检校那么直接输入或导入相机参数;
b.如果已经进展过空三那么可以导入软件子检校的相机参数〔此法对于无相机检校参数空三失败时有效,也即最好在空三前导入相机参数,此时可以导出空三结果良好的架次之相机检校参数用于其他架次〕。
图7-4导入相机参数
(3)修改位置和姿态参数〔终极提升方式〕
在4.3以后的版本中,如果空三结果不好,那么可以将以下图中两个参数设置为Compute在已有的结果上再次进展空三。
图7-5修改位置和姿态参数
8提升模型效果
8.1改进拍摄方式〔未进展严密论证〕
建议在空中+地面拍摄的方式建模时,在使用地面照片拍照的上方使用大疆精灵补充拍摄一层〔镜头倾斜〕。
具体拍摄方式如以下图9-5所示,如果条件允许建议使用图9-6中所使用的拍照方式,
〔注:
针对建筑物前有树木遮挡的情况,建议尽量使用精灵进展补拍,不建议使用地面拍摄,除非树木极为密集那么可以使用地面相机补充屋檐。
如必须进展地面补拍,那么需尽量避开树木。
〕精灵建议补拍方式:
〔拍摄距离不应低于30米,特殊情况下可以先让相机倾斜的较为厉害,不建议直接近距离进展拍摄,必须先保证精灵将屋顶和侧面完全覆盖以后再考虑拉近拍摄。
〕
图7-5精灵补充拍摄方式
图7-6多层渐近拍摄方式
根据原始航片进展建模得到的三维模型效果一直不出色,后在建模之前对原片进展特色后模型效果有局部提升,以下为使用到的一些参数。
〔1〕使用CameraRaw工具〔快捷键Ctrl+Shift+A〕中的“fx〞选项卡中的去雾工具对照片进展去雾,比照度,特别是其去雾效果很好;然后再使用阴影/高光〔图像--->调整-->阴影/高光〕可以加亮暗部,压缩亮部。
初步形成经历参数:
不严重
严重
去雾
30-50%
70-80%
锐化
15-20
比照度
15-25
清晰度
15-25
色温
5-10
色调
-5—-15
CameraRaw调整效果
〔2〕添加颜色蒙板
Extra/High:
模型细节好,数据量大〔4倍左右〕,建模时间长〔2倍以上〕,建议大型或超大型工程使用;
Middle:
模型细节差,数据量小,建模时间短,建议中小行工程使用。
Extra和Middle两种精度比照
Fillallholesexceptattileboundries:
每个瓦片模型除了边缘的孔外,没有内部孔
Fillsmallholesonly:
每个瓦片模型中出来极小的孔被软件自动填充后,会留下局部孔。
在Reconstruction参数设置中,将最后一个选项卡“Processingsettings〞中的“Geometricsimplification〞的参数设置为“Planer〞。
表示对生成的模型进展平面简化。
此参数使,a.路面更平〔但造成阶梯路面〕,b.建筑物形成直角,但是同时又导致模型的三角面比较破碎,对某些模型会严重降低显示效果。
因此该参数慎用,使用时建议小于默认参数。
几何简化
几何简化后效果
1导入水面约束
可以导入三维模型或者kml,或使用三维obj模型。
如果是kml注意导入路径必须为英文路径,且该kml文件中的多边形的每个节点必须有高程。
导入约束
更新模型
2导入模型约束
如果对于模型局部地方需要修改,如建筑物、公路或一些漂浮物,那么需要先生成一份该区域的obj格式模型,到每个Tile中去修改obj。
然后再将修改的obj按照原有的目录形式保存,再使用Reconstruction中的“Reference3DModel〞选项卡,使用它“ImportRetouches...〞工具导入修改好的obj模型。
如以下图所示,在“ImportRetouches〞对话框中,分上下两个局部,上面局部只是针对修改的模型重新进展纹理映射〔会改变模型UV〕,下面局部那么对按照导入的模型和纹理进展格式转换。
〔如果需要生成多级模型建议先修改模型然后更新,再使用更新的模型进展纹理修改进入下面的固定模型和纹理操作〕
注:
如果在生成obj模型时改动过坐标系,那么在导入的obj模型坐标系应和生成时的坐标系一致。
9不同航高航片、空中+地面照片及大区域联合建模方法
1无像控点的情况下〔小区域〕
〔1〕使用高航高航片或者空中照片进展建模,然后在模型上刺点,将这些点作为低航高航片或地面照片的控制点。
〔2〕对低航高航片或地面照片进展空三,然后合并空三〔Mergeblocks〕进展建模即可。
2使用像控点的情况下〔适合不同航高及大区域联合建模是使用〕
只需要分别根据像控点刺点进展空三后,再使用合并空三〔Mergeblocks〕进展建模即可。
合并多个空三
10利用CC软件自带的CCViewer查看osgb数据〔本节内容借鉴wish3d发布的瓦片索引文档〕
1提交一个s3c格式的模型〔不用执行,只需要利用其生成的.s3c索引文件即可〕
提交产品
生成的s3c索引文件
2通过CC软件自带的CC_S3CComposer工具〔软件安装目录下〕
翻开s3c索引文件
如果翻开失败,那么将该索引文件复制到桌面,然后再翻开。
翻开后的s3c索引文件
3修改.s3c索引文件
翻开s3c索引文件
把前面翻开的“Editcommandline〞面板中的内容复制到txt文档
替换文件后缀名
替换文件后缀名后
注:
有心者可以看到此处的索引是包含〞Data〞路径的,如果想联合多个osgb模型,也可以可以改变文件夹名称,前提是需要这几个osgb模型的坐标原点是一致的。
4保存修改后的.s3c索引文件,并复制到osgb模型目录。
将替换文件后缀名的内容从txt文档中复制到前面的“Editcommandline〞
使用替换后的内容替换旧的内容
替换索引内容后
保存新的osgb模型索引
复制到osgb模型所在位置,然后双击翻开。
11系统要求
系统推荐:
推荐win10专业版或企业版
硬件推荐:
CPU:
i7(主频高第一,核心多第二)
内存:
32G以上
显卡:
NvidiaGTX1070以上
如有侵权请联系告知删除,感谢你们的配合!
 升级会员
升级会员 