精品气动机械手带欧姆龙PLC控制程序要点.docx
《精品气动机械手带欧姆龙PLC控制程序要点.docx》由会员分享,可在线阅读,更多相关《精品气动机械手带欧姆龙PLC控制程序要点.docx(7页珍藏版)》请在冰豆网上搜索。
精品气动机械手带欧姆龙PLC控制程序要点
气动机械手(带欧姆龙PLC控制程序)要点
一、设计题目、工作原理和要求
二、气动系统设计
三、绘制工作流程图
四、编写PLC程序
五、整理设计中过程中遇到的主要问题和解决策略
六、总结
主要参考文献
一、设计题目、工作原理和要求
1.设计题目:
搬运机械手机及控制系统设计
2.工作原理:
可编程控制器(PLC是一种数字运算操作的电子系统,它将逻辑运算、顺序控制、时序、计数、算术运算等控制程序,用指令形式存放在存储器中,并通过数字式、模拟式的输入和输出,控制各种机械或生产过程。
与继电器控制线路相比,PLC具有可靠性高、抗干扰能力强;编程简单、使用方便;设计、安装容易,维护工作量少;功能完善、通用性强;体积小、能耗低等特点。
因此,机械手控制系统越来越多的由可编程控制器(即PLC来实现。
3.控制要求:
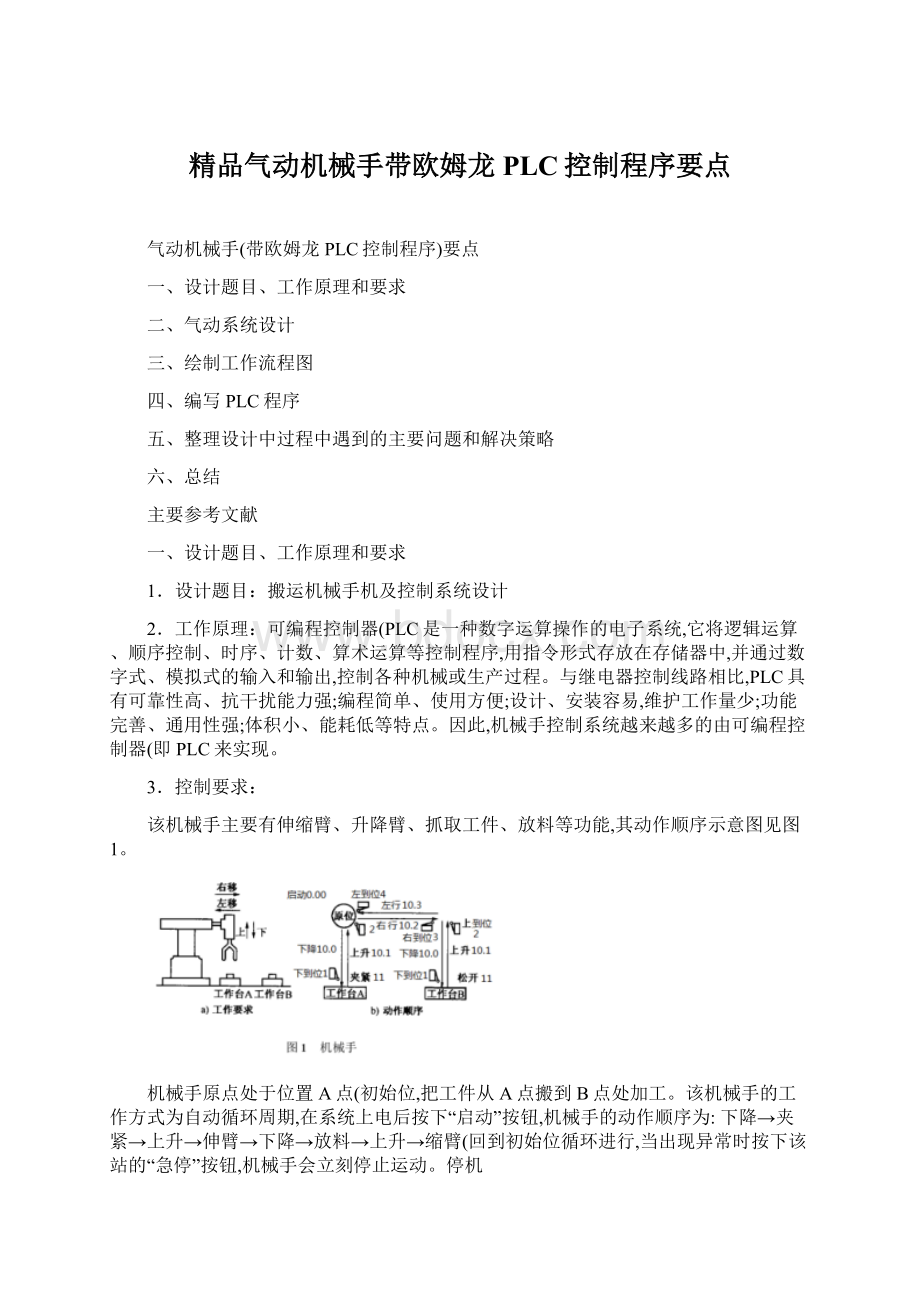
该机械手主要有伸缩臂、升降臂、抓取工件、放料等功能,其动作顺序示意图见图1。
机械手原点处于位置A点(初始位,把工件从A点搬到B点处加工。
该机械手的工作方式为自动循环周期,在系统上电后按下“启动”按钮,机械手的动作顺序为:
下降→夹紧→上升→伸臂→下降→放料→上升→缩臂(回到初始位循环进行,当出现异常时按下该站的“急停”按钮,机械手会立刻停止运动。
停机
二、电气与气动系统设计
1.设计思想和方法
气动实验装置PLC型号为欧姆龙CPM1A_2A_2AH,主要工作参数为12个输入和8个输出点。
另外根据材料形状的不同,采用立式钳口夹持方式,基本上就实现了机械化,提高了劳动生产率,把工人从恶劣的工作环境中解脱出来。
在设计过程中,注重了从环保及操作者的人身安全方面考虑,并可按用户的要求作特殊的设计,而且考虑到成本上的经济性,本设计依据实验室现有条件,从已有的汽缸、气阀中选择2个三位五通气动阀来控制上下和左右的运动,用一个单作用弹簧复位电磁气动阀控制钳口的开合。
气动元件具体型号:
2个MA20X100-S-CA汽缸、1个MSA20X75-S-CA弹簧复位汽缸、2个4VBOC-06三位五通电磁阀、1个3V110-06-NC两位四通电磁阀、5个LJ12A3-4-Z1E常开到位开关
解决的具体实际问题:
开始随便选了一个单作用弹簧复位电磁气动阀,但程序没有开始就会有抓取的动作,后来检查电磁阀,发现P口常开且与气泵相连,换了一个常闭的电磁阀问题解决。
2.气动系统控制原理图
3、结合气动系统和原理要求设计的系统工作流程图
4、PLC输入输出端口与换向阀和各信号检测开关的地址对照表
I端
O端
名称
地址
名称
地址
启动
0.00
下降
10.00
下到位
0.01
上升
10.01
上到位
0.02
右行
10.02
右到位
0.03
左行
10.03
左到位
0.04
抓取
10.04
停止
0.05
运行状态
1.01
抓紧
0.11
下行辅助
1.02
手动左行
0.06
手动上升
0.07
5、控制梯形图
编译
在线工作
.
传送
6、电气接线图
(1)电气接线图
I端
O端
名称
地址
名称
地址
启动
0.00
下降
10.00
下到位
0.01
上升
10.01
上到位
0.02
右行
10.02
右到位
0.03
左行
10.03
左到位
0.04
抓取
10.04
停止
0.05
运行状态
1.01
抓紧
0.11
下行辅助
1.02
手动左行
0.06
手动上升
0.07
(2)使用器件说明
手动左行I6、手动上升I7可以使系统回到零点,只有处于原点位置才能进行启动,按下启动I0后,下降O10.00得电,下降到位I1触动后启动抓取O10.04,抓紧I11接通后启动上升O10.01,上升到位I2接通后启动右行O10.02,右到位后开始下行O10.00,下到位后松开2s,然后先上再左回到原点。
设计关键:
1、左面下降要抓取,右面下降要松开,所以下到位就不够用了,这时候可以加一个有没有工件的逻辑,问题就解决了。
2、程序循环运行是本控制系统设计的难点,也是亮点,一般的话可以用定时器,或者本来就没有循环,程序简单。
本设计巧妙运用了DIFD指令,使得程序完美实现了不停循环的效果。
三、设计和接线调试中遇到的主要问题和解决策略
问题1:
以前编程序,靠检测开关一步步进行就行了,我还把右面下到位的开关改了,但气动基本只有两个位置,其实下到位只有1个,怎么才能下来知道该抓还是放呢?
经过分析流程图,发现抓紧可以做逻辑开关。
问题2:
自己在电脑上编写的程序感觉逻辑没有问题,但程序就是不能运行,经排查发现自己设计仅考虑了过程,没有想到系统初始状态对程序的影响,这经过不断修正就能解决。
问题3:
三菱的PLC编写好程序后,连接PLC,传输程序后就可以直接启动了,但初次用欧姆龙不了解情况,干完了发现没有动静,点什么都不动,后来请教老师,发现是运行状态的问题。
问题4:
程序循环启动是设计的难点,因为原点是程序的开始,很不好改,比较简单的做法是加一个定时器,最后一步回原点开始计时,但这个时间其实跟系统的压强、温度等因素有关,太长影响效率,太短回发生抓取故障,解决的策略是找合适的指令或者开关量,最后发现DIFD指令可以完美完成任务。
四、设计总结;
经过这些天查阅资料、泡在实验室不断的修改程序,最终的结果还是很令我欣慰的,这个过程我不仅学到了很多欧姆龙PLC的知识和操作,更重要的是,我可以运用自己以前掌握的知识和技能来一步步完成整个的机电一体化设计,当然过程是曲折的,从什么都不懂,到读懂气动元件和气动流程图,完成硬件接线到熟悉软件,还是有很多值得回忆的地方,比如不知道PLC型号,结果编写的程序不能传;传完程序结果怎么也不动,老师指导说没有在运行状态;更可笑的是有一次什么都对了,但汽缸得电就是不动作,我还以为是坏了呢,结果忘记开总气闸了;为了分开下到位抓还是放,尝试IL、JMP、KEEP各种指令,结果还是不行;程序不断的出错,自己学到的东西也就多。
机电一体化课程设计,将机电专业理论课程的相关内容有机结合起来,使我受到完整的设计过程训练,使我对机械本体和电子、电气控制的软硬件的设计过程有全面的了解,使我掌握机电工程设计的基本方法,提高其分析问题和解决实际工程问题的能力,培养我的工程观念,将整个课程内容有机而系统地结合起来。
工业机器人是一种典型的机电一体化产品,机器人技术是综合了计算机、控制、机构学、传感技术等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。
本课程设计将以移动工业机器人为研究对象,开展机器人结构设计、制作和控制,初步掌握机械系统、环境识别系统和运动控制系统的设计方法,训练如何查资料及图表、数据处理、自动控制以及创新能力,使我具备独立设计机电一体化产品的能力,提高综合应用已有知识解决问题的能力,更好地培养机电一体化专业我的专业技术能力和综合素质。
这次机电一体化课程设计对我以后的毕业设计和工作有很大帮助,感谢老师给予的热心帮助和悉心教导。
参考文献
1.文继华,刘建斌,朱月,红梁萍.PLC在自动给料系统中的应用.科学技术与工程[J],2007年;
2.凌勇坚.气压机械手的设计[J].起重运输机械,2004;
3.严纪兰,董 峰,李明亮.基于PLC控制的搬运机械手的应用[J].机械工程与自动化,2008;
4.刘红兵.装出料机械手设计[J].机械设计与制造,2003.
5.周 虹.气动与PLC技术相结合在机械手设计中的应用.液压与气动2004
6.李明.单臂回转式机械手设计.制造技术与机床.2005
 升级会员
升级会员 