循迹小车全面的软硬件分析.docx
《循迹小车全面的软硬件分析.docx》由会员分享,可在线阅读,更多相关《循迹小车全面的软硬件分析.docx(13页珍藏版)》请在冰豆网上搜索。
循迹小车全面的软硬件分析
循迹小车全面的软硬件分析
循迹小车设计任务和资料
一、设计任务:
使用单片机接收传感器发来识别的信号,经过处理,控制电机前进、左转和右转,使小车沿着一定的轨迹行驶。
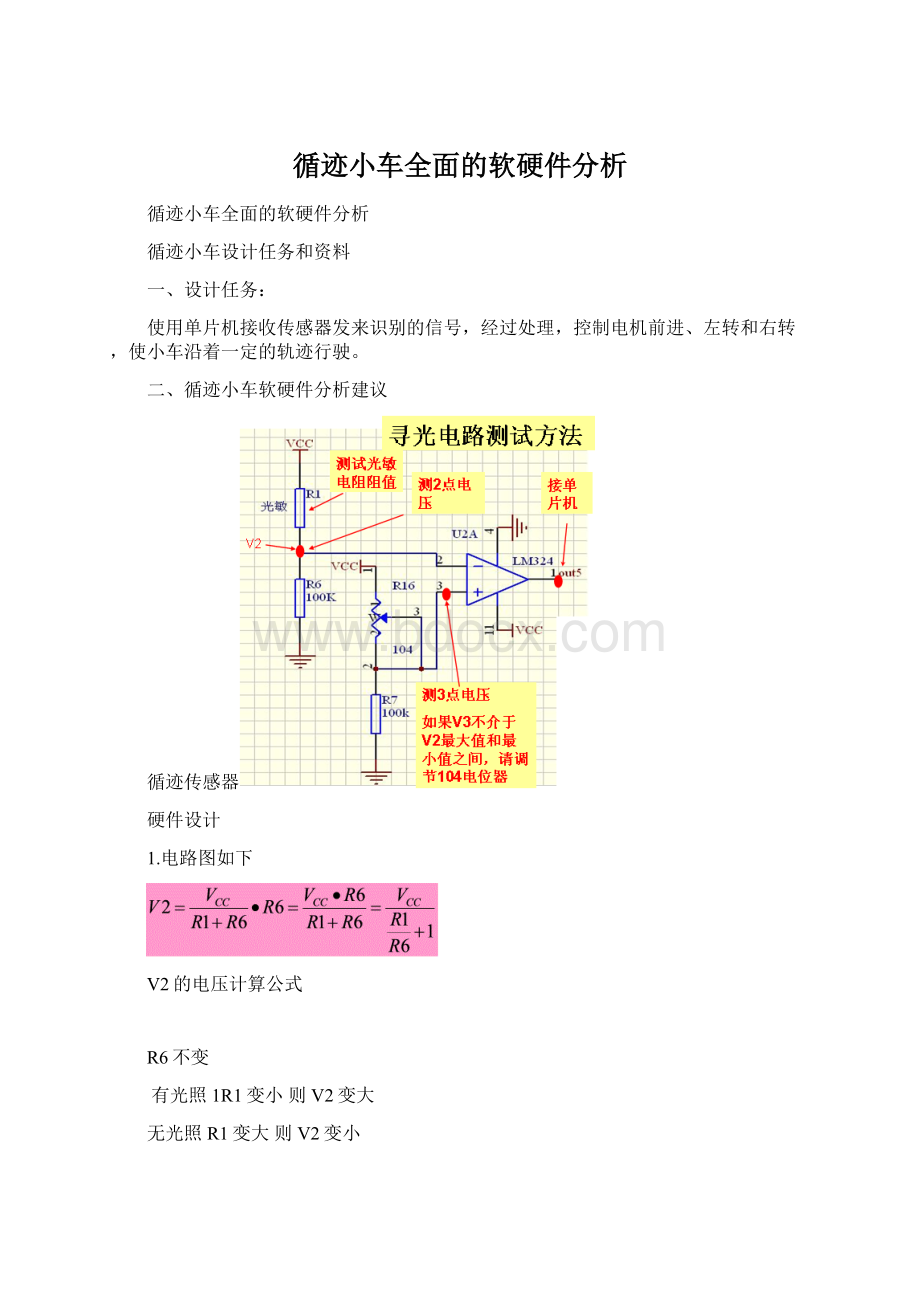
二、循迹小车软硬件分析建议
循迹传感器
硬件设计
1.电路图如下
V2的电压计算公式
R6不变
有光照1R1变小则V2变大
无光照R1变大则V2变小
有光照情况
光敏电阻R1变小
V2变大假设V2=4.6VT
V3电压4V
V2>V3反向端大于同向端参考模电课程运放作为比较器部分
则OUT5输出低电平为低0给单片机识别,单片机通过if来扫描out5给的引脚
无光照情况
光敏电阻R1变大
V2变小假设V2=3.2V
V3电压不变还是4V
V2则OUT5输出为高电平1给单片机识别,单片机通过if来扫描out5给的引脚
1、没有检测到黑线,则H4发光到白纸光反射到H4接收端,H4接收端导通,导通则T1接地=0(提问会不会等于0,哪位有测试)
2、有检测到黑线,则H4发光到黑线光全部被吸收,H4接收端,没有收到任何信号,因为H4不导通(截止),则T1=VCC(提问T1会不会等于5V,哪位有测试)
检测到白纸有接收到反射光LM324,2脚比较器反向端T1=0V,3脚比较器同向端=3V同向端大于反向端则OUT1输出1
检测到黑线没接收到反射光了,LM324,2脚比较器反向端T1=5V,3脚比较器同向端=3V,反向端大于同向端则OUT1输出0
调试方法,黑色物体遮挡传感器检测T1脚电压变化是否正常,调节电位器R13,使得3脚电压介于(2脚)T1电压的最大和最小值之间
传感器距离地面3-5CM
电机驱动模块设计建议
1、VDD越大电机A,B速度越快,VDD所接电池盒或者直流电源最好不要超过11V,否则比较容易烧毁。
2、控制时请尽量避免电机在短时间频繁正反转,这样容易也烧毁
注:
有的电机是不带线的,要一头接A1一头焊接在电机上,其他同理。
单片机模块设计
系统软件设计
4-1方向的判别程序
在寻黑胶带模式下:
车前从左至右安装5个红外发送接收对管。
(白色输出0,黑色输出1)
A
B
C
D
E
小车运动状态
0
0
1
0
0
直线行走
0
1
1
0
0
一级左转
1
1
0
0
0
二级左转
1
0
0
0
0
原地左转
0
0
1
1
0
一级右转
0
0
0
1
1
二级右转
0
0
0
0
1
原地右转
0
0
0
0
0
后退
其他情况
不动
#include
#defineuintunsignedint
#defineucharunsignedchar
#include
#defineuintunsignedint
#defineucharunsignedchar
uchari=0,j=0,k,temp;
sbitP10=P1^0;//循迹传感器最左有测得信号低电平有效
sbitP11=P1^1;//循迹传感器次左有测得信号
sbitP12=P1^2;//循迹传感器中有测得信号
sbitP13=P1^3;//循迹传感器次右有测得信号
sbitP14=P1^4;//循迹传感器最右有测得信号
sbitP23=P2^3;//单片机输出到L298N控制电机左后退
sbitP24=P2^4;//单片机输出到L298N控制电机左前进
sbitP25=P2^5;//单片机输出到L298N控制电机右后退
sbitP26=P2^6;//单片机输出到L298N控制电机右前进
voidinit()
{TMOD=0x01;
TH0=(65536-1000)/256;//1ms
TL0=(65536-1000)%256;
EA=1;
ET0=1;
TR0=1;
}
voidzuo()//左走
{P23=1;
P24=1;
P25=1;
P26=0;
}
voidyou()//右走
{P23=1;
P24=0;
P25=1;
P26=1;
}
voidzhi()//直走
{P23=1;
P24=0;
P25=1;
P26=0;
}
voidting()//停止
{P23=1;
P24=1;
P25=1;
P26=1;
}
voidmain()
{init();
while
(1)
{};
}
voidtime0()interrupt1
{TH0=(65536-1000)/256;//1ms
TL0=(65536-1000)%256;
temp=(P1|0xe0);//停僻高三位
switch(temp)
{case0xf7:
i=1;you();break;
case0xef:
i=2;you();break;
case0xe7:
i=3;you();break;
case0xe3:
i=4;you();break;
case0xf3:
i=5;you();break;
case0xfe:
j=1;zuo();break;
case0xfc:
j=2;zuo();break;
case0xf8:
j=3;zuo();break;
case0xf9:
j=4;zuo();break;
case0xfd:
j=5;zuo();break;
case0xfb:
k=1;zhi();break;
case0xf1:
k=2;zhi();break;
case0xe0:
ting();break;
case0xff:
if(i==1||i==2||i==3||i==4||i==5){i=0;you();}
if(j==1||j==2||j==3||j==4||j==5){j=0;zuo();}
if(k==1||k==2){k=0;zhi();}break;
default:
break;
}
}
表1控制代码表
传感器
循迹代码
转向灯
控制代码
显示器
显示码
电动机
控制代码
小车
运动状态
0x0f,0x17,0x1f,0x37,0x3f,0x7f
0x2f
0xbf,0xbf,0xbf,0xb0
0x4f
右转
0x47,0x67,0x87,0xc7,0xe7,0xf7
0x1f
0x86,0xbf,0xbf,0xbf
0x1f
左转
0x77
0x2f
0xf9,0xf9,0xf9,0xf9
0x5f
直行
0xff
0xff
0xbf,0xbf,0xbf,0xbf
Ox0f
后退
0x00
0xcf
0xc0,0xc0,0xc0,0xc0
0xff
停止
 升级会员
升级会员 