机械手国内外发展情况.docx
《机械手国内外发展情况.docx》由会员分享,可在线阅读,更多相关《机械手国内外发展情况.docx(10页珍藏版)》请在冰豆网上搜索。
机械手国内外发展情况
机械手的相关资料
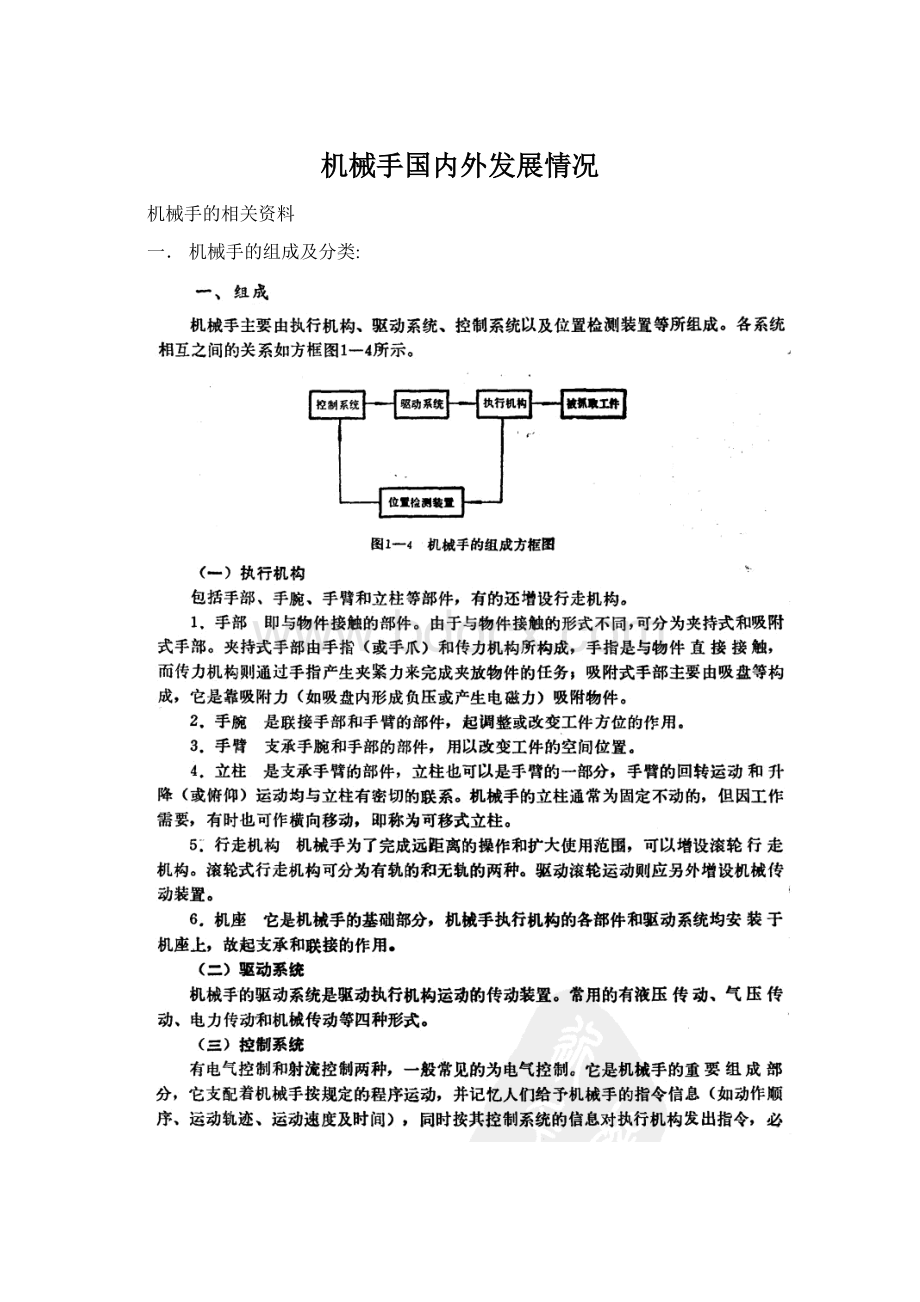
一.机械手的组成及分类:
四.抓取机构
八.机械手的发展趋势
1重复高精度
精度是指机械手达到指定点的精确程度,它与驱动器的分辨率以及反馈装置有关。
重复精度是指如果动作重复次数多,机械手到达同样位置的精确程度。
重复精度比精度更重要,如果一个机械手定位不够精确,通常会显示一个固定的误差,这个误差是可以预测的,因此可以通过编程予以校正。
重复精度限定的是一个随机误差的围,它通过一定次数地重复运行机械手来测定。
随着微电子技术和现代控制技术的发展,机械手的重复精度将越来越高,它的应用领域也将更广阔,如核工业和军事工业等。
2模块化
有的公司把带有系列导向驱动装置的机械手称为简单的传输技术,而把模块化拼装的机械手称为现代传输技术。
模块化拼装的机械手比组合导向驱动装置更具灵活的安装体系。
它集成电接口和带电缆及油管的导向系统装置,使机械手动作自如。
模块化机械手使同一机械手可能应用不同的模块而具有不同的功能,扩大了机械手的应用围,是机械手的一个重要的发展方向。
3节能化
为了适应食品、医药、生物工程、电子、纺织、精密仪器等行业的无污染要求不加润滑脂的不供油润滑元件已经问世。
随着材料技术的进步,新型材料的出现,构造特殊、用自润滑材料制造的无润滑元件,不仅节省润滑油、不污染环境,而且系统简单、摩擦性能稳定、成本低、寿命长。
4机电一体化
由“可编程控制器—传感器—液压元件”组成的典型的控制系统仍然是自动化技术的重要方面;发展与电子技术相结合的自适应控制液压元件,使液压技术从“开关控制”进入到高精度的“反馈控制”;节省配线的复合集成系统,不仅减少配线、配管和元件,而且拆装简单,大大提高了系统的可靠性。
而今,电磁阀的线圈功率越来越小,而PLC的输出功率在增大,由PLC直接控制线圈变得越来越可能。
国外机械手的发展趋势是大力研制具有某种智能的机械手。
使它具有一定的传感能力,能反馈外界条件的变化,作相应的变更。
如位置发生稍许偏差时,即能更正并自行检测,重点是研究视觉功能和触觉功能。
目前已经取得一定成绩。
视觉功能即在机械手上安装有电视照相机和光学测距仪以及微型计算机。
工作是电视照相机将物体形象变成视频信号,然后送给计算机,以便分析物体的种类、大小、颜色和位置,并发出指令控制机械手进行工作。
触觉功能即是在机械手上安装有触觉反馈控制装置。
工作时机械手首先伸出手指寻找工作,通过安装在手指的压力敏感元件产生触觉作用,然后伸向前方,抓住工件。
手的抓力大小通过装在手指的敏感元件来控制,达到自动调整握力的大小。
总之,随着传感技术的发展机械手装配作业的能力也将进一步提高。
更重要的是将机械手、柔性制造系统和柔性制造单元相结合,从而根本改变目前机械制造系统的人工操作状态。
随着科学与技术的发展,机械手的应用领域也不断扩大。
目前,机械手不仅应用于传统制造业,如采矿、冶金、石油、化学、船舶等领域,同时也已开始扩大到核能、航空、航天、医药、生化等高科技领域以及家庭清洁、医疗康复等服务业领域中。
 升级会员
升级会员 