直流电动机闭环调速实验.docx
《直流电动机闭环调速实验.docx》由会员分享,可在线阅读,更多相关《直流电动机闭环调速实验.docx(6页珍藏版)》请在冰豆网上搜索。
直流电动机闭环调速实验
UniversityofSouthChina
电气传动技术
实验报告1
实验名称直流电动机闭环调谏实验
学院名称电气工程学院
指导教师
班级电力
学号
学生姓名
预习报告
目的:
1了解并掌握典型环节模拟电路构成方法。
2熟悉各典型线性环节阶跃响应曲线。
3了解参数变化对典型环节动态性能影响。
内容:
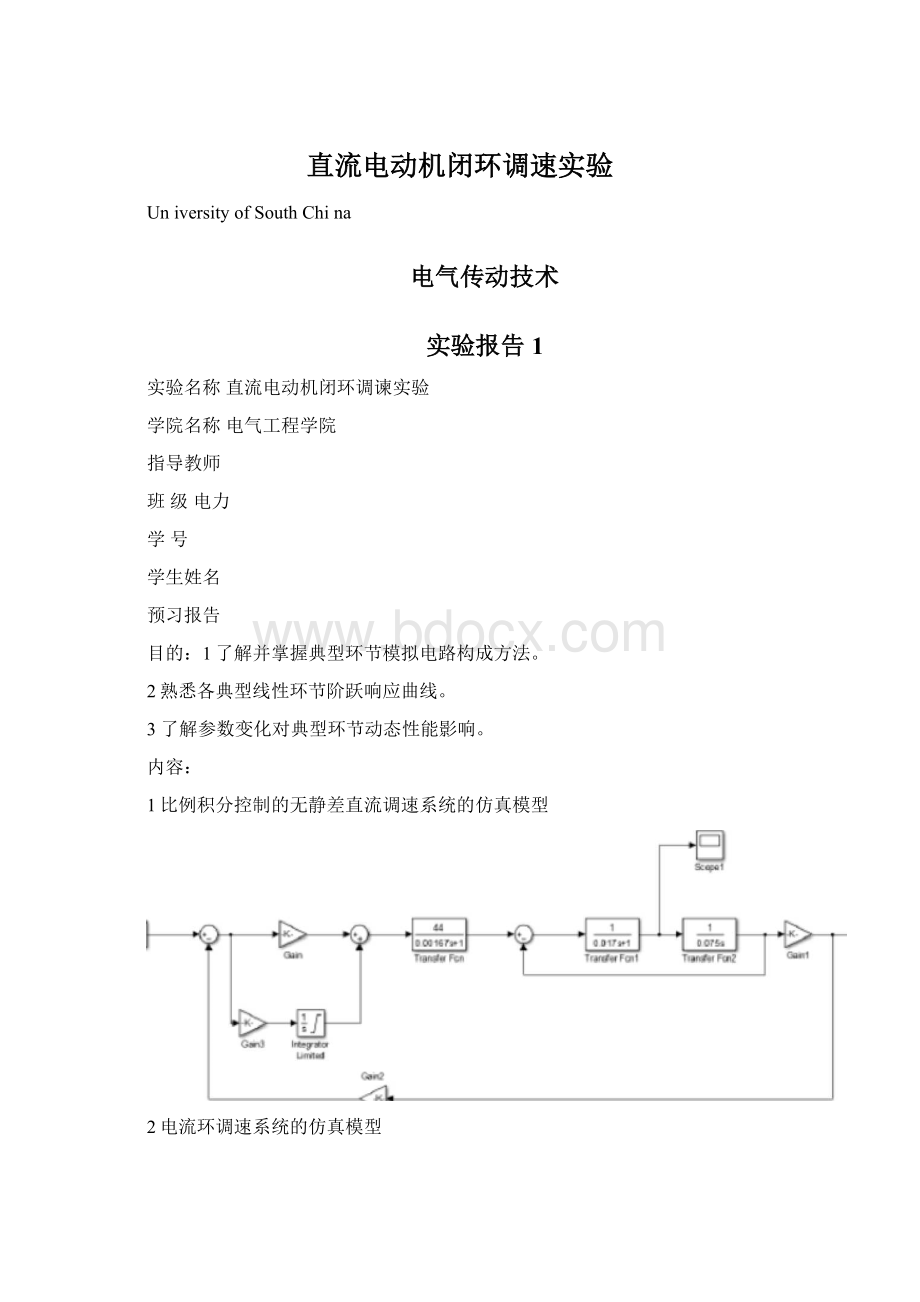
1比例积分控制的无静差直流调速系统的仿真模型
2电流环调速系统的仿真模型
3转速环调速系统的仿真模型
二实验报告
直流电动机:
额定电压Un=220N,额定电流ldN=55A,额定转速nN=1000r/min,电动机电动势系数Ce=0.192Vmin/r。
假定晶闸管整流装置输出电流可逆,装置的放大系数Ks=44,滞后的时间常数
Ts=0.00167s。
电枢回路总电阻R=1.0Q,电枢回路电磁时间常数
Ti=0.00167s,电力拖动系统机电时间常数Tm=0.075s。
转速反馈系
数a=0.01Vmin/r。
对应额定转速时的给定电压U*=10V。
双闭环调速系统中Ks=40,Ts=0.0017s,Tm=0.18s,Ti=0.03s,
Toi=0.002s,Ton=0.01s,R=0Q,Ce=0.132V•min/r,a
=0.00666Vmin/r,p=0.05Vmin/r。
一比例积分控制的无静差直流调速系统中PI调节器的值为:
Kp=0.56,1/萨11.34
无静差调速系统输出(Scope图像1)
输出波形比例部分(Scopel图像2)
对比图1和图2可以发现,只应用比例控制的话,系统响应速度快,但是静差率大,而添加积分环节后,系统既保留了比例环节的快速响应性,又具有了积分环节的无静差调速特性,使调速系统稳定性相对更高,动态响应速度也快。
当取=0.25,1/t=3时,系统转的响应无超调,但调节时间很长
如
图
无超调的仿真结果3
当=0.8,1/i=15时,系统转速的响应的超调较大,但快速性较好。
如图所示。
•&Q严a昂诃由oh苹曲m白■口
Ecofw*■iccpr*
超调较大的仿真结果4
控制系统的各项动态跟随性能指标与参数KT有关。
当系统的时间常数T一定时,随着开环增益K的增大,系统的快速性提高,而稳定性变差。
若要求动态响应快,则把K取得大一点;若要求超调小,则把K取得小一点。
二1双闭环调速系统中电流环系统的pi调节器的传递函数微
1.013+1.013/(0.03*s),KT=0.5,曲线为
.if;r....|-
豐即q庐azlata日■年田m日。
日
双闭环调速系统中转速环系统中PI调节器的传递
0.5067+16.89/s,KT=0.25。
曲线为
很快的得到电流环的阶跃响应的仿真结果,无超调,但上升时间长,
2当KT=1.0,即传递函数为2.027+67.567/s,曲线为超调大,但
上升时间短。
••片4理护鼻凶口日■■ambd□
三,1双闭环调速系统中转速环系统中PI调节器的传递函数为
11.7+134.48/s,负载电流为0A,曲线图如下可以看出,系统转速最终稳定运行于给定系统。
2当负载电流设置为136A时,曲线如图为启动时间延长,退饱和超
调量减少.
3加入扰动。
曲线如下,从转速调节器使转速n跟随给定电压
变化,当偏差电压为零时,实现稳态无静差。
其输出限幅值决定允许的最大电流电流调节器起动时保证获得允许的最大电流,使系统获得最大加速度起动。
当电机过载甚至于堵转时,限制电枢电流的最大而起大快速的
O
四心得体会
通过此次试验,使我对MATLAB中的SIMULINK仿真软件也有了进一步的了解,通过SIMULINK仿真软件的仿真功能,可以用图像化的方法直接建立系统模型,使我可以很直观方便地了解一些系统特性。
同时通过自己动手做实验,计算数据,使我对比例积分控制的无静差直流电机调速系统又有了更深层次的学习。
 升级会员
升级会员 