控制系统的校正.docx
《控制系统的校正.docx》由会员分享,可在线阅读,更多相关《控制系统的校正.docx(15页珍藏版)》请在冰豆网上搜索。
控制系统的校正
基于MATLAB控制系统的校正设计
1实验目的
1掌握串联校正环节对系统稳定性的影响。
2了解使用SISO系统设计工具(SISODesignTool)进行系统设计。
2设计任务
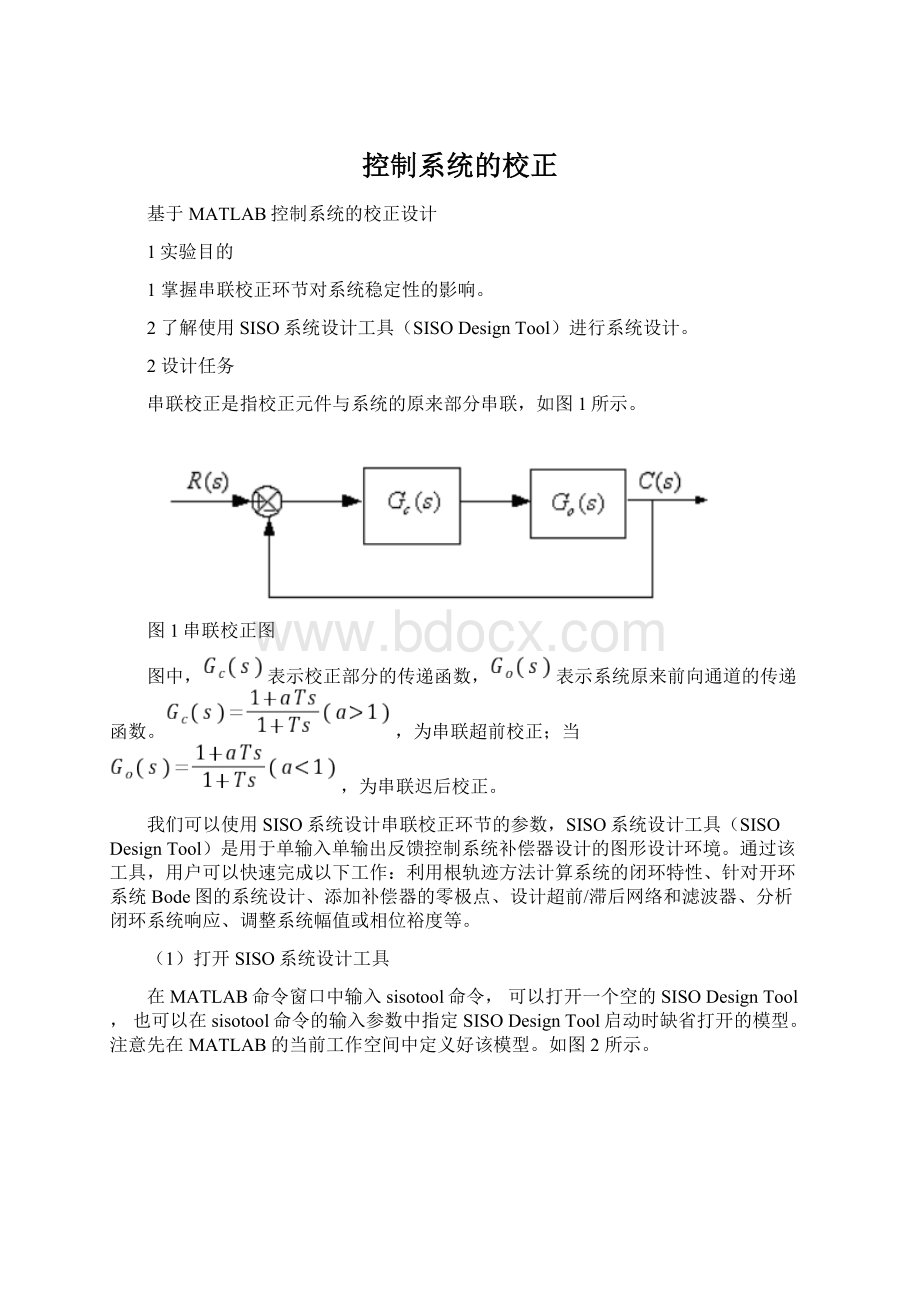
串联校正是指校正元件与系统的原来部分串联,如图1所示。
图1串联校正图
图中,表示校正部分的传递函数,表示系统原来前向通道的传递函数。
,为串联超前校正;当,为串联迟后校正。
我们可以使用SISO系统设计串联校正环节的参数,SISO系统设计工具(SISODesignTool)是用于单输入单输出反馈控制系统补偿器设计的图形设计环境。
通过该工具,用户可以快速完成以下工作:
利用根轨迹方法计算系统的闭环特性、针对开环系统Bode图的系统设计、添加补偿器的零极点、设计超前/滞后网络和滤波器、分析闭环系统响应、调整系统幅值或相位裕度等。
(1)打开SISO系统设计工具
在MATLAB命令窗口中输入sisotool命令,可以打开一个空的SISODesignTool,也可以在sisotool命令的输入参数中指定SISODesignTool启动时缺省打开的模型。
注意先在MATLAB的当前工作空间中定义好该模型。
如图2所示。
图2SISO系统的图形设计环境
(2)将模型载入SISO设计工具
通过file/import命令,可以将所要研究的模型载入SISO设计工具中。
点击该菜单项后,将弹出ImportSystemData对话框,如图3所示。
图3ImportSystemData对话框
(3)当前的补偿器(CurrentCompensator)
图2中当前的补偿器(CurrentCompensator)一栏显示的是目前设计的系统补偿器的结构。
缺省的补偿器增益是一个没有任何动态属性的单位增益,一旦在跟轨迹图和Bode图中添加零极点或移动曲线,该栏将自动显示补偿器结构。
(4)反馈结构
SISODesignTool在缺省条件下将补偿器放在系统的前向通道中,用户可以通过“+/-”按钮选择正负反馈,通过“FS”按钮在如下图4几种结构之间进行切换。
图4SISODesignTool中的反馈控制结构
例1图1所示的控制系统,原开环传递函数为
用SISO系统设计工具(SISODesignTool)设计超前校正环节,使其校正后系统的静态速度误差系数,相角裕度为45°,并绘制校正前后的Bode图,并计算校正前后的相角裕度。
1将模型载入SISO设计工具
在MATLAB命令窗口先定义好模型,用MATLAB编程如下:
num=2;
den=conv([,1,0],[,1]);
G=tf(num,den)
运行得到结果如下:
Transferfunction:
2
----------------------
s^3+s^2+s
输入sisotool命令,可以打开一个空的SISODesignTool,通过file/import令,可以将模型G载入SISO设计工具中,如图5所示。
图5改变增益后的系统
(2)调整增益
根据要求系统的静态速度误差系数,补偿器的增益应为3,将图5中的C(s)=1改为3,如图5所示。
从图中Bode相频图左下角可以看出相位裕度,不满足要求。
(3)加入超前校正网络
在开环Bode图中点击鼠标右键,选择“AddPole/Zero”下的“Lead”菜单,该命令将在控制器中添加一个超前校正网络。
这时鼠标的光标将变成“X”形状,将鼠标移到Bode图幅频曲线上接近最右端极点的位置按下鼠标,得到如图6所示的系统。
图6增加超前网络后的系统
从图中Bode相频图左下角可以看出相位裕度,仍不满足要求,需进一步调整超前环节的参数。
(4)调整超前网络的零极点
将超前网络的零点移动到靠近原来最左边的极点位置,接下来将超前网络的极点向右移动,并注意移动过程中相角裕度的增长,一直到相角裕度达到45°,此时超前网络满足设计要求。
如图7所示。
图7最后满足要求的系统
从图中可以看出来,超前网络的传递函数为,最后系统的,。
例2图1所示的控制系统,原开环传递函数为
试用SISO系统设计工具(SISODesignTool)设计超前校正环节,使其校正后系统的静态速度误差系数,相角裕度为30°,并绘制校正前后的Bode图,并计算校正前后的相角裕度。
例3使用SISODesignTool设计直流电机调速系统。
典型电机结构示意图如图8所示,控制系统的输入变量为输入电压,系统输出是电机负载条件下的转动角速度。
现设计补偿器的目的是通过对系统输入一定的电压,使电机带动负载以期望的角速度转动,并要求系统具有一定的稳定裕度。
图8直流电动机调速系统
直流电机动态模型本质上可以视为典型二阶系统,设某直流电机的传递函数为
系统的设计指标为:
上升时间﹤,稳态误差﹤5%,最大超调量,幅值裕度,相角裕度。
系统设计步骤:
(1)调整补偿器的增益
如果对该系统进行时域仿真,可发现其阶跃响应时间很大,提高系统响应速度的最简单方法就是增加补偿器增益的大小。
在SISO的设计工具中可以很方便的实现补偿器增益的调节:
鼠标移动到Bode幅值线上,按下鼠标左键抓取Bode幅值线,向上拖动,释放鼠标,系统自动计算改变的系统增益和极点。
既然系统要求上升时间﹤,应调整系统增益,使得系统的穿越频率位于3rad/s附近。
这是因为3rad/s的频率位置近似对应于的上升时间。
为了更清楚的查找系统的穿越频率,点击鼠标右键,在快捷菜单中选择“Grid”命令,将在Bode图中绘制网格线。
观察系统的阶跃响应,可以看到系统的稳态误差和上升时间已得到改善,但要满足所有的设计指标,还应加入更复杂的控制器。
(2)加入积分器
点击鼠标右键,在弹出的快捷菜单中选择“AddPole/Zero”下的“Integrator”菜单,这时系统将加入一个积分器,系统的穿越频率随之改变,应调整补偿器的增益将穿越频率调整回3rad/s的位置。
(3)加入超前校正网络
为了添加一个超前校正网络,在开环Bode图中点击鼠标右键,选择“AddPole/Zero”下的“Lead”菜单,该命令将在控制器中添加一个超前校正网络。
这时鼠标的光标将变成“X”形状,将鼠标移到Bode图幅频曲线上接近最右端极点的位置按下鼠标。
从Bode图中可以看出幅值裕度还没有达到要求,还需进一步调整超前环节的参数。
(4)移动补偿器的零极点
为了提高系统的响应速度,将超前网络的零点移动到靠近电机原来最左边的极点位置,接下来将超前网络的极点向右移动,并注意移动过程中幅值裕度的增长。
也可以通过调节增益来增加系统的幅值裕度。
试按照上述方法调整超前网络参数和增益,最终满足设计的要求。
3实验步骤及结果
上述例2中,试用SISO系统设计工具(SISODesignTool)设计超前校正环节,使其校正后系统的静态速度误差系数,相角裕度为30°,并绘制校正前后的Bode图,并计算校正前后的相角裕度。
(1)将模型载入SISO设计工具
在MATLAB命令窗口先定义好模型
MATLAB程序如下:
num=1;
den=conv([1,0],[,1]);
G=tf(num,den)
输入sisotool命令,可以打开一个空的SISODesignTool,通过file/import命令,可以将模型G载入SISO设计工具中,如图9所示:
图9增益为1时SISO系统
(2)调整增益
根据要求系统的静态速度误差系数,补偿器的增益应为100,将上图中的C(s)=1改为100,如图10所示。
从图中Bode相频图左下角可以看出相位裕度γ=°,不满足要求。
图10增益为100的系统
(3)加入超前校正网络
在开环Bode图中点击鼠标右键,选择“AddPole/Zero”下的“Lead”菜单,该命令将在控制器中添加一个超前校正网络。
这时鼠标的光标将变成“X”形状,将鼠标移到Bode图幅频曲线上接近最右端极点的位置按下鼠标,得到如下图11所示的系统:
图11调节至相位裕度γ=°的系统
从图中Bode相频图左下角可以看出相位裕度γ=°,仍不满足要求,需进一步调整超前环节的参数。
(4)调整超前网络的零极点
超前网络的零点移动到靠近原来最左边的极点位置,接下来将超前网络的极点向右移动,并注意移动过程中相角裕度的增长,一直到相角裕度达到30°,此时超前网络满足设计要求,如图12所示。
图12相角裕度达到30°的系统
从图中可以看出来,超前网络的传递函数为,最后系统的,γ=30°。
3使用SISODesignTool设计直流电机调速系统。
直流电机动态模型本质上可以视为典型二阶系统,设某直流电机的传递函数为
系统的设计指标为:
上升时间﹤,稳态误差﹤5%,最大超调量,幅值裕度,相角裕度。
(1)将模型载入SISO设计工具
在MATLAB命令窗口先定义好模型
编MATLAB程序如下:
num=;
den=[114];
G=tf(num,den)
输入sisotool命令,通过file/import命令,将模型G载入SISO工具中,如图13所示:
调整补偿器的增益
鼠标移动到Bode幅值线上,按下鼠标左键抓取Bode幅值线,向上拖动,释放鼠标,系统自动计算改变的系统增益和极点。
既然系统要求上升时间﹤,应调整系统增益,使得系统的穿越频率,位于3rad/s附近。
这是因为3rad/s的频率位置近似对应于的上升时间。
此时,系统增益为,如下图14所示。
观察系统的阶跃响应,可以看到系统的稳态误差和上升时间已得到改善,但要满足所有的设计指标,还应加入更复杂的控制器。
图14增益为时的系统
加入积分器
点击鼠标右键,在弹出的快捷菜单中选择“AddPole/Zero”下的“Integrator”菜单,系统加入一个积分器,系统的穿越频率随之改变,应调整补偿器的增益将穿越频率调整回3rad/s的位置,此时系统增益为108,如图15所示:
图15加入积分器时的系统
加入超前校正网络
在开环Bode图中点击鼠标右键,选择“AddPole/Zero”下的“Lead”菜单,该命令将在控制器中添加一个超前校正网络。
这时鼠标的光标将变成“X”形状,将鼠标移到Bode图幅频曲线上接近最右端极点的位置按下鼠标。
如图16所示:
图16加入超前校正网格时的系统
从Bode图中可以看出幅值裕度还没有达到要求,还需进一步调整超前环节的参数。
移动补偿器的零极点
为了提高系统的响应速度,将超前网络的零点移动到靠近电机原来最左边的极点位置,接下来将超前网络的极点向右移动,并注意移动过程中幅值裕度的增长。
如图17所示:
图17移动补偿器的零极点时的系统
从图中可以看出,此时幅值裕度,相角裕度γ=°,满足要求,穿越频率=s,位于3rad/s附近,观察其阶跃响应,可以看到系统的稳态误差和超调量均满足要求,此时补偿器的传递函数为
 升级会员
升级会员 