高处作业吊篮的操作.docx
《高处作业吊篮的操作.docx》由会员分享,可在线阅读,更多相关《高处作业吊篮的操作.docx(27页珍藏版)》请在冰豆网上搜索。
高处作业吊篮的操作
高处作业吊篮的操作
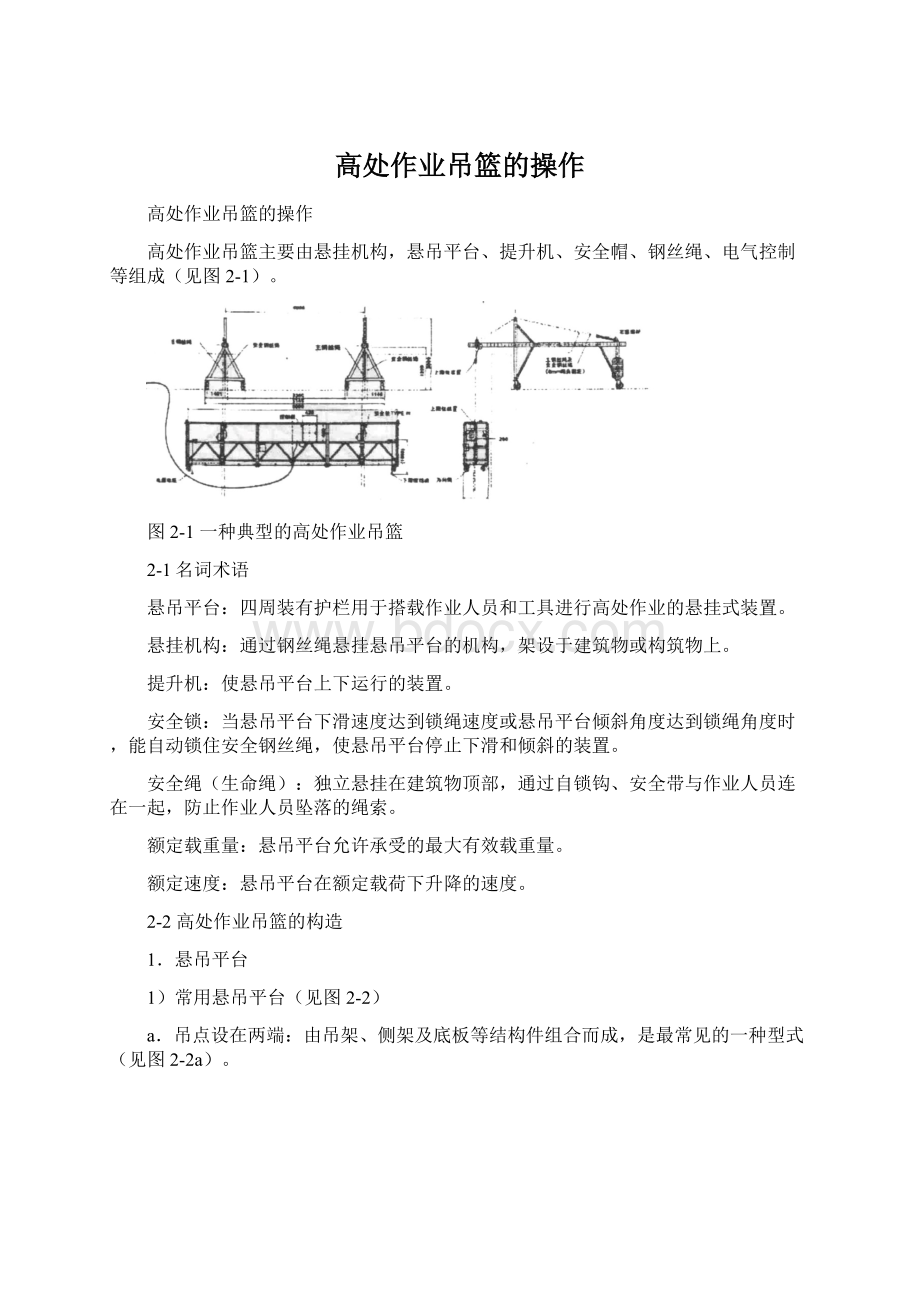
高处作业吊篮主要由悬挂机构,悬吊平台、提升机、安全帽、钢丝绳、电气控制等组成(见图2-1)。
图2-1一种典型的高处作业吊篮
2-1名词术语
悬吊平台:
四周装有护栏用于搭载作业人员和工具进行高处作业的悬挂式装置。
悬挂机构:
通过钢丝绳悬挂悬吊平台的机构,架设于建筑物或构筑物上。
提升机:
使悬吊平台上下运行的装置。
安全锁:
当悬吊平台下滑速度达到锁绳速度或悬吊平台倾斜角度达到锁绳角度时,能自动锁住安全钢丝绳,使悬吊平台停止下滑和倾斜的装置。
安全绳(生命绳):
独立悬挂在建筑物顶部,通过自锁钩、安全带与作业人员连在一起,防止作业人员坠落的绳索。
额定载重量:
悬吊平台允许承受的最大有效载重量。
额定速度:
悬吊平台在额定载荷下升降的速度。
2-2高处作业吊篮的构造
1.悬吊平台
1)常用悬吊平台(见图2-2)
a.吊点设在两端:
由吊架、侧架及底板等结构件组合而成,是最常见的一种型式(见图2-2a)。
图2-2a.吊点在两端的平台
b.吊点在内侧:
吊点由两端向内移,使悬吊平台两端可悬挑一段距离。
适用于较长的悬吊平台或屋面上场地受限制的场合(见图2-2b)。
图2-2b.吊点在内侧的平台
c.带收绳卷筒的悬吊平台:
在普通悬吊平台上增加收卷钢丝绳的卷筒。
它可以避免钢丝绳对建筑物墙面的碰刮(图2-2c)。
图2—2c.带收绳卷筒的平台
2)特殊平台(见图2-3)
a.单吊点平台:
悬吊平台或吊椅由单台提升机驱动,体积小,能进入狭小的空间进行作业(图2-3a)。
b.圆形、方形平台:
主要用于建筑物内部如电梯井及楼房天井等特殊场合(图2-3b)。
c.多层平台:
由多个单层平台组合而成。
应用它可以进行多工序流水作业,并且可提高悬吊平台的稳定性(图2-3c)。
图2-3a.单吊点悬挂平台
图2-3b.圆形、方形悬挂平台
图2-3c.多层悬挂平台
2.常见的几种悬挂机构(见图2-4)
a.杠杆式悬挂机构:
形状如同一杠杆,前端安装钢丝绳,后端安装有足够的配重,它是应用最广、最为常见的一种悬挂机构(见图2-4a)。
图2-4a.杠杆式悬挂机构
b.夹持女儿墙式悬挂机构:
有时屋顶空间小,无法安装杠杆式悬挂机构,在女儿墙承载能力允许的情况下,可以使用此类型的悬挂机构。
它的特点是体积小、重量轻、但对女儿坪有强度要求(见图2-4b)。
图2-4b.夹持女儿墙式悬挂机构
3.提升机
提升机是高处作业吊篮的核心部件,它由电动机、主制动器、辅助制动器、减速器、绳轮和压绳机构(或卷筒)组成。
通常可分以下几种类型。
卷扬式
提升机
式卷绳
爬升式
S式卷绳
常见的两种爬升式提升机的结构见图2-5。
图2-5两种绕绳方式的爬升式提升机
4.安全锁
安全锁是高处作业吊篮中最重要的安全保护装置。
安全锁由锁绳机构和触发机构组成,按工作原理可分为离心式和防倾式两类。
见图2-6。
图2-6
5.钢丝绳
高处作业吊篮的钢丝绳和其他起重机械所用钢丝绳相比,其受力方式有很大不同。
对于爬升式高处作业吊篮,由于它是靠绳轮和钢丝绳之间的摩擦力提升,钢丝绳受到强烈的挤压、弯曲,对钢丝绳的质量要求很高且应无油。
常用的钢丝绳的结构有:
6×19W+IWS(IWR),4×35SW+5PP(NF),5×26SW+PP。
规格为φ6~φ13mm
6.电气控制柜
高处作业吊篮的电气控制柜有集中式和分离式两种。
集中式电气控制柜在国内比较常用,所有提升机的电机电源线及行程限位的控制线全都接入一个电气控制柜,所有动作在该电气控制柜上操作。
而分离式的则是每个提升机一个电气箱,可单机操作,也可通过集线盒多机操作。
7.其它
高处作业吊篮还需配备电缆、绳坠铁、限位止档、安全带、保险绳、防护围栏和警示标志等配件。
2-3吊篮分类和型号
1.吊篮分类
吊篮按驱动型式分为手动、气动和电动。
吊篮按特性分为爬升式和卷扬式。
吊篮按悬吊平台结构分为单层、双层、三层。
2.型号
高处作业吊篮型号的主参数。
高处作业吊篮的主参数用额定载重量表示,主参数系列见表1。
表1:
主参数系列
名称
单位
规格系数
额定载重量
Kg
100、150、200、250、300、350、400、500、630、800、1000、1250
高处作业吊篮型号由吊篮的组、型代号和主参数更新型代号组成。
图示如下:
标记示例:
a.额定载重量500kg电动、单层、爬升式高处作业吊篮:
高处作业吊篮ZLP500GB19155。
b.额定载重量800kg电动、双层、爬升式高处作业吊篮第一次变型产品:
高处作业吊篮2ZLP800AGB19155。
c.额定载重量400kg电动、单层卷扬式高处作业吊篮:
高处作业吊篮ZLJ400GB19155。
d.额定载质量300kg手动、单层爬升式高处作业吊篮:
高处作业吊篮ZLSP300GB19155。
2-4高处作业吊篮的主要性能参数
国内几种常见的高处作业吊篮性能参数如下表:
参数
ZLP300
ZLP630
ZLP800
额定载重量
300kg
630kg
800kg
升降速度
6m/min
5m/min
7~9m/min
悬吊平台尺寸
6m
6m
7.5m
钢丝绳直径
8mm
8.3mm
8.6mm
电机功率
0.5kW×2
0.5kW×2
2.2kW×2
安全锁
锁绳速度
(离心式)
25m/min
—
—
锁绳角度
(摆臂式)
—
<5°
<5°
整机自重
800kg
690kg
1100kg
生产厂
上海美装外墙设备
工程有限公司
上海虹口建筑
机械厂
无锡通天建筑
机械厂
第三章高处作业吊篮的主要机构的工作原理与典型结构
3-1提升机工作原理
提升机由电动机、主制动器、辅助制动器.减速器、绳轮(或卷筒)和压绳机构等组成。
下面根据升降特性的不同,分述其工作原理。
1.卷扬式提升机
卷扬式提升机与一般使用的卷扬机构属于同一类型,主要由电机、卷筒、安全装置等组成。
在吊篮系统中的具体应用是将其置于平台下方或底部,与篮体结构固接,使用时收卷或释放钢丝绳,带动悬吊平台升降.卷扬式提升机与一般使用的卷扬机相比,体积小、重量轻,有超重安全装置,以提高悬吊平台的有效搭载量,保证人员的安全(见图3-1)。
图3-1卷扬式提升机
2.爬升式提升机
爬升式提升机与卷扬式提升机最大的区别在于平台升降时,提升机不收卷或释放钢丝绳,它是靠绳轮与钢丝绳间产生的摩擦力,作为带动吊篮平台升降的动力。
其原理可按图3-2所示的情况解释,铅笔上缠绕线绳,线绳具有一定张紧力。
铅笔和线绳间有足够的摩擦力时,转动铅笔,铅笔就可沿绳子上升。
图3-2
下面用力学公式进一步加以分析(见图3-3)
图3-3
假设钢丝绳为绝对柔软的不伸长的挠性体,围绕绳轮有一定的包角α,并在一端施以一定的初拉力T1,使钢丝绳张紧。
当绳轮如图方向旋转时,便会在另一端产生一个放大了的拉力T1,当T2足够大时,绳轮与钢丝绳之间产生的摩擦力足以使绳轮上、下运动。
当提升时悬吊平台就会向上升起,达到提升的目的。
用公式表达,即为T2=T1efα。
式中:
e—为自然对数的底,其值为2.718;
f—为钢丝绳与绳轮间的当量摩擦系数;
α—为钢丝绳在绳轮上的包角,T1为初始拉力,
T2—为最终提升拉力。
从以上分析可以看出,要保证有足够的提升拉力T2,必须要有足够大的当量摩擦系数f,包角α以及初拉力T1。
爬升式提升机可按缠绕方式不同分为“α”式绕法和“S”式绕法两种主要型式。
(见图3-4、图3-5)
图3-4“α”式绕法图3-5“S”式绕法
“α”式绕法与“S”式绕法的根本区别有两点:
其一,钢丝绳在提升机内运行的轨迹不同;其二,钢丝绳在机内的受力不同,前者只向一侧弯曲,后者向两侧弯曲,承受交变载荷。
3-2提升机典型结构
提升机一般均由电动机、主辅制动器、减速器、绳轮(或卷筒)等构成。
由于高处作业吊篮高空作业的特点,又经常需要横向移位,因此提升机在设计上一般都追求自重尽可能轻,以提高悬吊平台有效载重量,并减轻在搬运、安装时的劳动量。
1.卷扬式提升机结构
卷扬式提升机是通过卷筒收卷或释放钢丝绳,使悬吊平台得以升降。
主要由电动机、卷筒、制动器、减速器、导向轮等构成(见图3-1)。
减速器一般采用蜗轮减速系统,或行星减速系统,采用行星减速可将其设置在卷简内以减小体积。
形成一套小型而完整的设备。
如图3-1所示。
提升机的制动器是控制吊篮上下运动的重要组成部分。
它可以使悬吊平台可靠停止在工作位置,或在下降过程中,保持或控制下降的速度。
卷扬式提升机制动系统一般采用闸瓦式制动器(见图3-6),其工作原理是:
当电机接入电源时,制动器的电磁线圈同时接通电源,由于电磁吸力作用,电磁铁吸引衔铁并压缩弹簧,刹车片与刹车鼓脱开,电机运转。
当切断电源,制动器电磁铁失去电磁吸力,弹簧力推动刹车片压紧刹车鼓,在摩擦力矩的作用下,电机立即停止转动。
图3-6
2.爬升式提升机结构
爬升式提升机的工作原理如前所述,是利用绳轮与钢丝绳之间产生的摩擦力作为吊篮爬升的动力,工作时钢丝绳静止不动,绳轮在其上爬行,从而带动提升机及吊篮整体提升。
下面介绍几种典型的“α”型及“S”型提升机的主要构造。
,
1)采用多级齿轮减速系统和出绳点压绳方式的“α”型提升机(见图3-7)。
图3-7采用多级齿轮减速系统和出绳点压绳方式的“α”型提升机
此种提升机的减速机构是采用多级直齿减速驱动绳轮3,钢丝绳从上方入绳口穿入后,经过摆杆1右方的导轮穿入绳轮,绕行近l周后,又经过压绳杆2下方的一组压绳轮及摆杆1左端的另一组压绳轮,最后排出提升机。
钢丝绳在机内呈“α”形状,故命名为“α”型提升机。
可以看出当提升机有载荷时,作用在钢丝绳上的力便会迫使摆杆1绕其上方的铰轴逆时针转动,从而用左端的一组压绳轮将钢丝绳压紧在绳轮轮槽内,再结合另一组由弹簧提供作用力的压绳轮,取得提升机所需的初始拉力。
提升机的辅助制动采用“载荷自制式”制动系统,其作用是提升机电机停止后,自动制动住载荷,使悬吊平台停止在工作位置;而电机转动则可打开制动,当电机反转时悬吊平台自重使之以控制的方式下降。
在停电情况下也可以手动松开制动,使悬吊平台下降至安全地点。
提升机的驱动电机采用盘式制动电机(见图3-8)。
以下简要说明其制动工作原理:
当电机与三相电源接通后。
定子产生轴向旋转磁场,在转子导条中感应出电流,两者相作用产生了电磁转矩,与此同时,由定子产生的磁吸力将转子轴向吸引,使转子上的盘式制动器的摩擦片与静止摩擦片相互脱离,电机在电磁转矩作用下开始转动。
当电机切断电流,旋转磁场及磁吸引力同时消失,转子在制动弹簧的压力下与盘式制动器的摩擦面接触产生了摩擦力矩,使电动机立即停止转动。
盘式电机的后部设有手动松车装置,以备停电情况下,手动松开制动,利用悬吊平台自重下降。
图3-8盘式制动电机
2)采用多级齿轮减速系统和链条压绳方式的“α”型提升机(见图3-9)
图3-9采用多级齿轮减速系统和链条压绳方式的“α”型提升机
其减速机构及制动系统与上一类型提升机基本相似。
最大的区别在于其压绳的方式与之不同,是采用链条压紧的方式,将钢丝绳压紧在绳轮与链轮之间,从而取得工作所需的提升力。
其链条对钢丝绳的压紧力取自载荷的分力,如图所示,当提升机下端连接环上施加向下的载荷时,与连接环连接的摆块便会绕其中部的铰轴如图方向转动,从而将链轮的端部拉紧,链条上的链轮便会产生对钢丝绳的压紧力,并且随载荷大小的变化自动变化。
3)采用行星减速系统和压盘压绳方式的“α”型提升机(见图3-10)。
提升机的减速系统由一级定轴齿轮传动加两级差动行星传动构成。
采用行星减速方式的优点是体积小而减速比大,但要求加工精度较高。
本类型提升机的制动系统采用盘式电机制动,原理与前述相同,也可以手动的方式松开制动。
图3-10采用行星减速系统和压盘压绳方式的“α”型提升机
其绕绳方式如图所示,钢丝绳从入绳口进入提升机的绳轮与压盘之间,被夹紧后绕绳轮近一周,由出绳口排出提升机。
在绳轮与压盘之间设一“胀环套”结构,它的作用是在入绳处,及排绳处减小一部分压绳力,使入绳及排绳顺畅进行。
压绳系统的特点是采用压盘方式将钢丝绳横向夹紧在绳轮上,压绳力靠14组均匀分布的碟形弹簧产生,是预先设定好的压紧力数值,能够产生足够的摩擦力使悬吊平台得以上升。
4)采用谐波减速系统和压盘压绳方式的“α”型提升机,见图3-11。
1.辖动刚轮
2.固定刚轮
3.波发生器
4.薄壁轴承
5.盘式电机
6.柔轮
图3-11
提升机的压绳方式及制动系统,也采用压盘压绳方式和盘式电机制动,只是减速系统由原来的一级定轴齿轮传动加两级差动行星传动改进为谐波齿轮传动。
谐波齿轮传动的特点是,大传动比条件下,零件数量少、结构紧凑、体积小,有利于提升机整机减轻重量,缩小体积。
其基本结构如图3-11。
5)采用行星减速系统和出绳点压绳方式的“S”型提升机(见图3-12)。
图3-12采用行星减速系统和出绳点压绳方式的“S”型提升机
此类提升机的减速系统由少齿差行星传动加一级直齿传动构成。
如图所示,电机出轴通过偏心套12驱动行星轮9使之运动,再将动力传递给轴11,轴11上小齿轮带动大齿轮(与绳轮合为一体的结构)运转。
其压绳机构由连接板5、小滑轮1、大滑轮8及下部的铰轴组成。
钢丝绳4分别经过小滑轮1、大齿轮3(即绳轮)及大滑轮8呈“S”形在提升机内缠绕,当钢丝绳(上图所示4)上有载荷时,由于钢丝绳给予小滑轮一个较小包角的作用,整个压绳机构被迫绕其下方的铰轴逆时针转动,从而带动大滑轮8将钢丝绳压紧在绳轮3的绳槽内,从上述可知,其压绳机构对钢丝绳压绳力完全取决于载荷的分力,并且能随载荷大小的变化而自动变化,结构简单可靠。
提升机的制动系统也采用盘式制动电机。
6)采用蜗轮蜗杆减速系统和压盘压绳方式的“S”型提开机(见图3-13)。
图3-13采用蜗轮蜗杆减速系统和压盘压绳方式的“S”型提升机
其减速系统如图所示,由蜗杆35、蜗轮40、一级减速再加齿轮轴37、大齿轮轴22一级减速构成,传动平稳且减速比大,可以自锁,但传动效率较低。
在电机的输入端设有限速器28,当电机严重损坏或手动释放制动导致悬吊平台下降过快时,限速器(上图所示28)的飞锤由于离心力的作用向外张开,与制动毂27的内壁产生摩擦消耗能量,从而限制悬吊平台下降的速度。
保证人员的安全。
制动系统采用电磁制动器10,其内设有电磁线圈,摩擦盘11及复位弹簧,当电机12通电后,制动器的电磁线圈产生磁吸引力,使电机脱离摩擦盘11的制动,断电后磁吸引力消失,在复位弹簧的作用下电机又处于制动状态。
在电磁制动器上设有手动下降手柄,以备在停电状态下使用。
其绕绳方式为S型,钢丝绳进入提升机后,先由下部经过一绳轮,边绕边被压紧,随后绕过上部绳轮,边绕边放松压紧程度,最后经出绳口吐出,钢丝绳在机内呈“S”形状。
在上下两绳轮上均设有压盘,通过压紧弹簧的作用将钢丝绳压紧在上下绳轮的绳槽内,以此获得提升的动力。
3-3安全锁工作原理
安全锁是保证吊篮安全工作的重要部件。
当提升机构钢丝绳突然切断或发生故障产生超速下滑等意外发生时,它应迅速动作,在瞬时将悬吊平台锁走在安全钢丝绳上。
按照其工作原理不同可分为两类:
即离心触发式及摆臂防倾式。
1.离心触发式安全锁工作原理(见图3-14)
图3-14离心触发式安全锁工作原理
离心触发式安全锁的基本特征为均具有离心触发机构。
安全钢丝绳由入绳口穿入压紧轮与飞块转盘间,吊篮下降时钢丝绳以摩擦力带动两轮同步逆向转动,在飞块转盘上设有飞块,当吊篮下降速度超过一定值时,飞块产生的离心力克服弹簧的约束力向外甩开到一定程度,触动拨杆带动锁绳机构动作,将锁块锁紧在安全钢丝绳上,从而使吊篮整体停止下降,锁绳机构可以有多种型式,如楔块式、凸轮式等,一般均设计为自锁形式。
2.防倾式安全锁工作原理(见图3-15)。
图3-15防倾式安全锁工作原理
本类型安全锁的基本特征为:
当吊篮发生倾斜或工作钢丝绳断裂、松驰时,锁绳装置发生角度位置变化。
从而带动执行元件使锁绳机构动作,将锁块锁紧在安全钢丝绳上。
3-4安全锁典型结构
以下各举一例来说明安全锁的基本结构。
1.离心触发式安全锁工作结构(图3-16)。
1.飞块;2.拉簧;
3.拔杆;4.小拔杆;
5.手柄;6.压杆;
7.导向套;8.叉型凸轮;9.锁块;10.弹簧;
11.滑轮;12.S型弹簧;13.外壳
图3.16离心触发式安全锁构造原理图
如图:
安全锁的离心触发机构由飞块、拉簧等组成,两飞块一端铰接于轮盘上,另一端则通过拉簧相互连接。
钢丝绳从导向套进入后,从两只锁块之间穿入(锁块间留有一定的间隙),穿出前与飞块轮盘联动的滑轮通过弹簧将钢丝绳压紧,以保证飞块轮盘能与钢丝绳同步运动。
当吊篮下降时,飞块轮盘被钢丝绳带动旋转,当旋转速度超过某一设定值时,飞块就会克服拉簧的拉力向外张开,直至触发拨杆为止,由于拨杆与叉型凸轮是联动装置,而锁块是靠叉型凸轮的支承才处于张开的稳定状态。
拔杆带动叉型凸轮动作后,锁块机构失去支承,靠其铰轴上的扭力弹簧的作用,锁块闭合,形成钢丝绳产生自锁的状态,此后产生的锁绳力随载荷的增加而增加,以此达到将钢丝绳可靠锁紧,阻止吊篮整体进一步下滑的目的。
2.防倾式安全锁工作结构(见图3-17)
防倾式安全锁是建立在杠杆原理基础上,由动作控制部分和锁绳部分组成。
控制部分主要零件有滚轮、摆臂、转动组件等,锁绳部分有锁夹、弹簧、套板等,防倾斜锁打开和锁紧的动作控制由工作钢丝绳的状态决定。
图3-17防倾式安全锁构造原理图
吊篮正常工作时,工作钢丝绳通过防倾斜锁滚轮与限位之间穿入提升机。
当工作钢丝绳处于绷紧状态,使得滚轮和摆臂向上抬起,拨叉压下套板,锁夹处于张开状态,安全钢丝绳得以自由通过防倾斜锁。
当吊篮发生倾斜或工作钢丝绳断裂(悬吊平台倾斜角度达到锁绳角度时)时,低端或断裂处工作钢丝绳对安全锁滚轮的压力消失,锁夹在弹簧和套板的作用下夹紧安全钢丝绳。
悬吊平台就停止下滑,达到确保安全的目的。
防倾斜锁安装在提升机安装架上端,滚轮与提升机进绳孔处于上下垂直位置。
提升机固定好后,按要求穿入工作钢丝绳,然后将安全钢丝绳穿入防倾斜锁。
另外一种比较新颖的防倾安全锁见(图3-18)
1.外壳体;
2.离心装置;
3.导向体;
4.上锁柄;
5.定位固定环
6.按扣环;
7.按扣环联结索;
8.安全绳;
9.螺栓;
10.销钉
图3-18一种比较新颖的防倾安全锁
3-5电气控制原理
吊篮系统由于动作少、功率小,因而电控部分比较简单,它要由一些常规的元器件所组成。
图3-19是一种比较典型的电气控制原理图
图3-19电气控制原理图
3-6电气控制元件
电气控制元件图(见图3-20)
图3-20电气控制原件图
以下简单说明图中出现的各电器符号及其作用。
1.KMl.KM2.KM3交流接触器(见图3-21)
图3-21交流接触器
接触器是应用电磁吸力闭合或断开的电器元件。
它在外信号(例如扭钮,其它电器触点的闭合或断开)的作用下,接通或断开带有负载的电路。
2.QF:
漏电断路器(见图3-22)。
又称漏电保护器,它可以在电器设备(或线路)发生漏电或接地故障时,能在人尚未接触之前就把电源切断,或者当人触及带电体时,能在0.1S内切断电源。
图3-22所示为一种直动式电流型漏电保护器。
图3-22.漏电保护装置
3.TC:
控制变压器
其作用是将操作电压降至低电压(36V)以确保使用者的安全。
图3-23热继电器
4.FR:
热继电器(见图3-23)
热继电器是保护电动机过载的一种自动控制电器,它是利用电流通过电阻丝产生的热效应来切断电路的。
按动作方式不同有双金属片和易熔合金式两种类型。
前者是利用过载电流的热效应使双金属片受热弯曲而推动触点系统动作;而后者是利用过载电流的热效应使易熔金属熔化而使触点系统闭合或分断。
由于双金属片式的结构简单,成本较低,使用方便,因此在机械设备控制电路中应用最广泛。
5.QC:
万能转换开关(见图3-24)
万能转换开关可同时接通断开多条回路,常用做控制电路的换接,操作不太频繁的小容量电动机的起动,反向或换速。
图3-24万能转换开关
6.SB:
按钮开关(见图3-25)
按扭开关是一种手动控制元件。
专门用来发出信号,接通或断开控制电路。
按钮开关一般有一对常闭触点和一对常开触点,在具体结构上,可做成多种特殊形式,如1)紧急式(急停开关):
它装有突出的红色蘑菇钮帽,以便紧急操作;2)指示灯式:
在透明的彩色按钮内装有信号灯供信号显示等。
(a)(b)(c)
图3-25控制按钮
7.STP:
急停开关
供操作者在误操作或紧急情况下切断主控回路,保证使用安全,参见上面内容。
8.U1.2制动整流元件(由电机配套,图略)
9.HL:
电源指示灯
10.SL1.2:
行程开关(见图3-26)
又称限位开关。
它是根据机械的行程或位置而自动切换线路,实行行程控制、位置控制或顺序控制。
具体在非常设式吊篮上的应用,主要有限位:
防止吊篮冲顶;超重限位:
防止吊篮超载;下限位:
落地后自动切断下降回路。
一般吊篮系统均必设上限位开关。
图3-26行程开关
11.FU:
熔断保险装置
12.HA:
报警电铃
当吊篮系统的行程开关动作时,发出警报声响,提醒操作者向正确方向操作。
13.YBl.YB2电磁制动器(由电机配套,图略)
3-7悬挂机构原理
悬挂机构,是架设于建筑物上(不一定是顶部),通过钢丝绳悬挂悬吊平台的装置总称。
它根据建筑物的不同可以有多种结构型式。
1.依托建筑物悬挂机构
载荷由女儿墙或檐口、外墙面承担。
使用时必须注意按设计要求装全、紧固所有的辅助安全部件,如固定钢索等,并要确认屋顶受力的女儿墙、檐口等能够安全承受吊篮系统所有载荷。
2.杠杆式悬挂机构(见图3-27)
此类型悬挂机构类似杠杆,由后部配重来平衡悬吊部分的工作载荷。
系统的抗倾覆系数等于配重矩比倾覆力矩,现行标准规定其值不得小于2,用公式表示即为:
≥2
式中:
K—-抗倾覆系数;
F—悬吊平台、提升机构、电气系统、钢丝绳、额定载质量等质量的总和,kg;
G—配置的配重质量(单位为kg);
a—承重钢丝绳中心到支点间的距离(单位为m);
b—配重中心到支点间的距离(单位为m)。
另外,这里要说明的是,悬挂机构有一些情况下,可能不是某种单纯形式,根据施工环境可能是某种或多种形式的组合,在应用时一定要仔细阅读并理解制造方的技术要求,以确保使用安全。
3-8悬挂机构典型结构
依托建筑物的悬挂机构比较简单,现以一种比较常见的杠杆式悬挂机构为例,对其结构做一简单分析。
图3-27悬挂机构构成示意图
1—加强钢丝绳;
2—钢丝绳夹;
3—螺栓;
4—绳轮;
5—前连接套;
6—钢丝绳悬挂架;
 升级会员
升级会员 