基于感应环线通信的移动闭塞制式CBTC系统.docx
《基于感应环线通信的移动闭塞制式CBTC系统.docx》由会员分享,可在线阅读,更多相关《基于感应环线通信的移动闭塞制式CBTC系统.docx(9页珍藏版)》请在冰豆网上搜索。
基于感应环线通信的移动闭塞制式CBTC系统
基于感应环线通信的移动闭塞制式CBTC系统
移动闭塞系统在城市轨道交通中运用的前提,是实现列车与地面的双向实时通信,而双向通信的地面有线设备,目前主要有两种方式,一种是在全线敷设用于发送微波的波导管,这种制式的移动闭塞,已于2003年初,在国外的城市轨道交通中得到运用;另一种是利用敷设于全线的感应环线进行双向通信,这种制式的移动闭塞,在国外早已经得到运用,目前我国至少有两个城市的轨道交通,决定采用这种制式。
由于篇幅所限,尽可能结合国内的实际情况,这里主要介绍基于“感应环线”通信的移动闭塞CBTC系统。
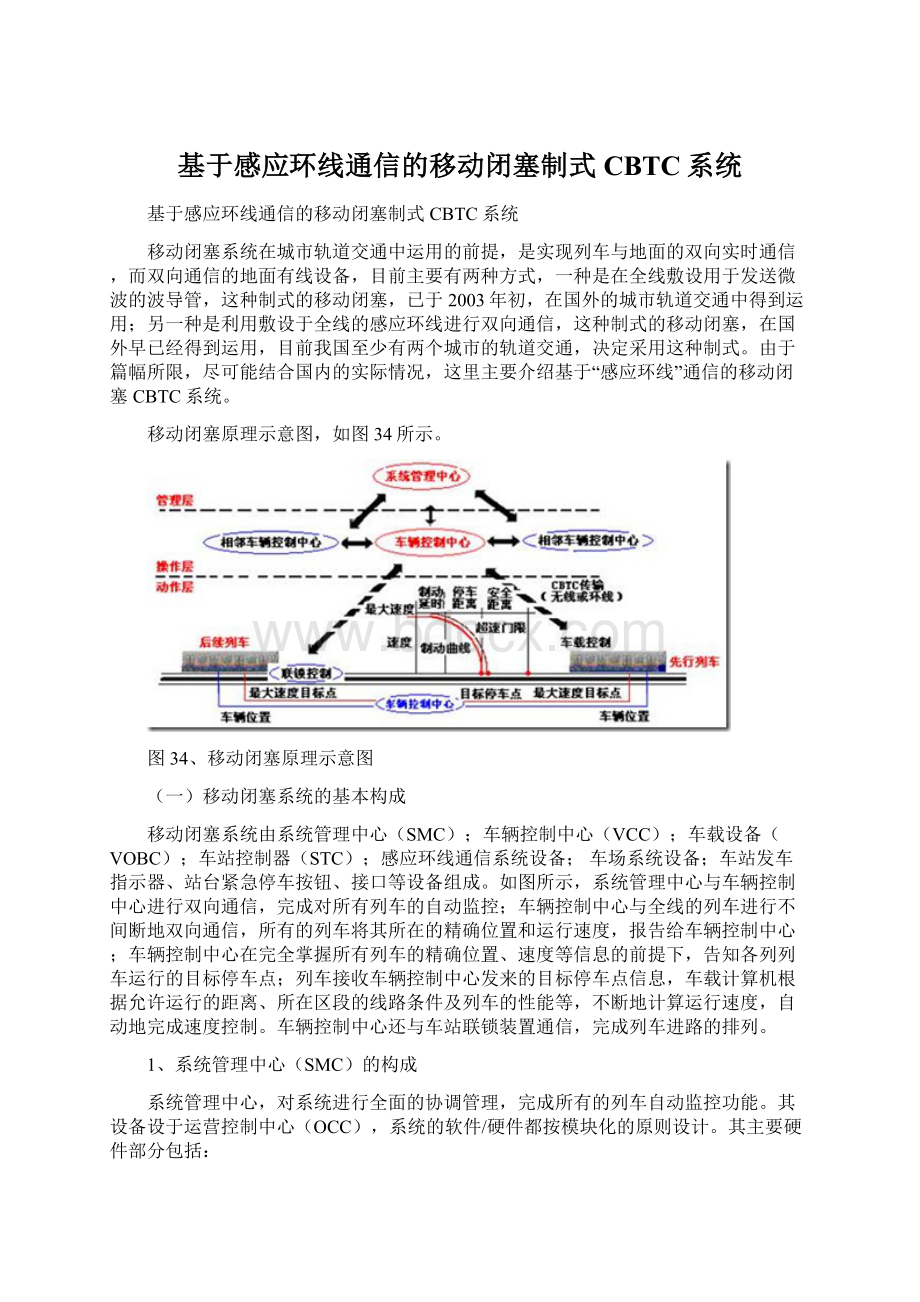
移动闭塞原理示意图,如图34所示。
图34、移动闭塞原理示意图
(一)移动闭塞系统的基本构成
移动闭塞系统由系统管理中心(SMC);车辆控制中心(VCC);车载设备(VOBC);车站控制器(STC);感应环线通信系统设备;车场系统设备;车站发车指示器、站台紧急停车按钮、接口等设备组成。
如图所示,系统管理中心与车辆控制中心进行双向通信,完成对所有列车的自动监控;车辆控制中心与全线的列车进行不间断地双向通信,所有的列车将其所在的精确位置和运行速度,报告给车辆控制中心;车辆控制中心在完全掌握所有列车的精确位置、速度等信息的前提下,告知各列列车运行的目标停车点;列车接收车辆控制中心发来的目标停车点信息,车载计算机根据允许运行的距离、所在区段的线路条件及列车的性能等,不断地计算运行速度,自动地完成速度控制。
车辆控制中心还与车站联锁装置通信,完成列车进路的排列。
1、系统管理中心(SMC)的构成
系统管理中心,对系统进行全面的协调管理,完成所有的列车自动监控功能。
其设备设于运营控制中心(OCC),系统的软件/硬件都按模块化的原则设计。
其主要硬件部分包括:
(1)系统管理中心工作站。
除系统服务器外,还配置调度员工作站、调度长工作站、模拟显示工作站、系统维护工作站、运行图编辑工作站及车场监视工作站。
(2)运行图调整服务器(SRS)。
冗余的运行图调整服务器,通过系统管理中心I/O与车辆控制中心相连,以实现运行图调整服务器与车辆控制中心的通信,运行图调整服务器还与SCADA、时钟、无线等系统接口。
(3)数据日志服务器,冗余配置,它可以保留二个月以上的运行数据。
(4)网络通信设施。
包括:
系统管理中心的双局域网、冗余交换机、与光纤传输通道的冗余接入设施、与培训中心及综合维修基地连接的通信设施等。
(5)车站控制器紧急通路(SCEG),当车辆控制中心出现故障,不能对系统进行控制时,管理中心通过车站控制紧急通路,直接与车站控制器(STC)进行通信连接,实现对在线列车和轨旁设备的监控。
车站控制器紧急通路有紧急通路切换开关设备、协议转换单元(PCU)组成,每台协议转换单元可与两台车站控制器进行通信连接。
(6)系统管理中心I/O机架。
(7)投影模拟显示系统。
包括:
模拟显示控制工作站,及背投模拟显示屏。
还有车场系统管理中心工作站,综合维修基地监测工作站、仿真及培训远程终端设备等。
2、车辆控制中心(VCC)的构成
车辆控制中心,位于运营控制中心,它有以下主要部分构成:
(1)车辆控制中心的中央计算机。
中央计算机采取三取二的配置,它包括三台工业级计算机,以及相关的输入/输出接口;三个中央处理单元通过显示/键盘选择开关,来共享一个显示和键盘;还有通用接口盒、电缆分线盒等。
(2)车辆控制中心的I/O机架。
主要设备有:
多路复用输入设备;中央同步设备;电源、定时器、保险丝等。
(3)车辆控制中心的数据传输架。
(4)车辆控制中心的调度员终端。
(5)中央紧急停车按钮(CESB)。
它与车辆控制中心接口,当调度员按下该按钮,将封锁所有的轨道,而且所有的列车立即停车;当紧急停车按钮中插入钥匙后,才可以解除。
车辆控制中心还设有数据记录计算机、打印机等其他设备。
3、轨旁设备
轨旁设备,主要有车站控制器(STC);感应环线通信系统;系统管理中心的车站工作站等设备。
(1)车站控制器,设于设备集中站,每个车站控制器都有一个道岔安全控制器,其中带冗余的双CPU固态联锁控制器,是车站控制器的核心单元。
车站控制器通过双共线调制解调链路与车辆控制中心通信,它有调制、解调器机架、接口盘、电源机架、预处理器及其机架等组成。
(2)感应环线通信系统,位于设备室和轨旁,它有以下设备组成:
馈电设备(FID);入口馈电设备(EFID);远端环线盒;感应环线电缆;支架等。
感应环线电缆由扭绞铜制线芯和绝缘防护层组成,环线敷设于轨道之间,每25米交叉一次。
(3)系统管理中心的车站工作站,由工业级计算机和接入设备组成,其接入光纤通信环网,实现与系统管理中心的远程通信。
它与车站控制器接口,实现车站的本地控制;还与旅客信息向导系统等设备接口。
轨旁设备还包括:
站台紧急停车按钮;站台发车指示器;车站现地控制盘;及信号机、转撤机等现场设备。
4、车载设备
ATC车载设备主要包括:
车载控制器(VOBC)及其外围设备。
(1)车载控制器,由电子单元(EU)、接口继电器单元(IRU)、供电单元等组成。
电子单元包括天线滤波器、高频接收器、数据接收器、数据发送器、高频发送器、定位计算机、双CPU处理单元、输出/输入端口、发送/接收卡、车辆识别卡、输出继电器、距离测量控制、转速表放大器等。
接口继电器单元包括:
继电器面板、滤波/防护模块、电子单元与接口继电器单元的互联电缆等。
(2)车载控制器的外围设备包括天线,(每个车载控制器设2个接收天线和2个发送天线);速度传感器,每个车载控制器设二个速度传感器;司机显示盘(TOD),每列车设置两套。
(3)接口。
信号系统内部接口包括:
与信号监测子系统的接口;与电源子系统的接口;与模拟显示屏的接口;与发车指示器的接口;与中央紧急停车按钮的接口;与信号机、转辙机等继电器控制电路的接口;与车站现地控制盘及站台紧急停车按钮的接口;与车场的接口;人机接口;主系统内部间的接口等。
信号系统外部接口包括:
与无线通信系统的接口;与时钟系统的接口;与通信传输系统的接口;与旅客信息系统(包括车上)的接口;与车辆的接口;与车辆管理系统的接口;与电力SCADA系统、FAS系统、BAS系统等的接口等。
(二)系统功能
基于感应环线通信的移动闭塞系统,能实现90秒的最小运行间隔。
后续列车与前一列车的安全间隔距离,是根据列车当前的运行速度、制动曲线,以及列车在线路上的位置而动态计算出来。
由于列车位置的定位精度高,因此,后续列车可以在该线路区段,以最大允许速度,安全地接近前一列车最后一次确认的尾部位置,并与之保持安全制动距离,如图35所示。
图35.移动闭塞目标点示意图
该“安全距离”是指后续列车的指令停车点(目标点)与前一列车尾部位置之间的一个固定距离,它是以最不利情况发生时,仍能保证安全间隔为前提计算而得。
假如列车采用常用制动,列车可以停在目标点,当常用制动失效,实施紧急制动时,除了紧急制动所需时间外,必须增加系统作用时间和牵引停止到紧急制动启动的延时时间,这种情况下列车真正的停车点并不是目标点,而是远于目标点,但必须停在安全距离的范围内。
为了确保列车的安全运行,列车必须连续不断地接收目标点的更新信息,系统设定列车在3秒内,收不到信息,就判断为通信发生故障,迫使列车紧急停车,保证列车运行安全。
目标停车点的周期性前移,主要取决于前一列车向前移动,和其他限制被解除。
在车辆控制中心,接收来自列车和现场设备的输入报文,当确认输入报文有效后,才产生相应的指令报文。
系统管理中心对整个系统内的列车进路,及运行图/时刻表进行管理,并向负责联锁及道岔控制的车辆控制中心发出排列进路的请求,完成道岔联锁功能。
一旦车辆控制中心确认道岔已锁在规定位置,才允许列车通过该道岔。
在车辆控制层,车载控制器将确保列车的特定功能(如实施速度限制和车门控制等)的安全控制,均在车辆控制中心限制范围内,车载控制器对来自车辆控制中心的报文,校核其冗余性、一致性、合理性,然后解译,并执行该报文。
当然它只对该列车(地址)为报头的报文作出反应,如果报文不是特定选址某一列车,那么车载控制器只从该报文提取环线识别号。
以识别从一个环线段至下一个环线段的转换。
移动闭塞系统功能框图见图36所示。
1、管理层——系统管理中心(SMC)
系统管理中心,负责列车自动控制系统的全面管理。
它起着系统与中心调度员及系统其他用户间接口的作用,它除了监控和显示列车位置、调整列车运行、排列列车进路、实现停站时间控制等功能外,还具备以下功能:
调度列车投入运营(增加或减少投入运营的列车);运行图/时刻表管理(包括时刻表的生成、指定和取消);自动调整列车运行(调整列车速度和停站时间);监测列车性能的状况并收集ATO数据;自动跟踪列车;监督列车位置、速度、运行方向;指挥列车操作和排列进路(联锁控制);优化折返作业;列车及线路的报警等。
图36.移动闭塞系统功能框图
(1)系统管理中心的中央工作站:
①系统维护工作站
所有工作站都由系统维护工作站管理,也即系统维护工作站对网络中的计算机系统进行维护,该工作站主要监视SMC网络性能,进行记录和对整个系统进行诊断和维护。
②运行图/时刻表编辑工作站
运行图/时刻表编辑工作站,可以在离线情况下对运行图/时刻表进行编辑,完成的运行图/时刻表文件,通过局域网传送到系统管理中心,也可以进行在线编辑。
③调度员工作站
调度员和调度长工作站实时监督在线列车的运行,并可实现列车运行的人工控制。
(2)系统管理中心的车站工作站
所有系统管理中心的车站工作站,都接入光纤通信环网,实现与中央系统管理中心的通信。
车站工作站,可以实现与控制中心调度员工作站相同的功能,受系统维护工作站管理,由调度员授权,并对其授权管辖区域进行控制和监视。
车站工作站,对车站控制器(STC)进行监视和现地控制。
可以实现以下本地控制功能。
①系统在正常情况下,根据控制中心的授权,车站工作站可以对本站进行控制,控制命令通过光纤骨干网首先传回系统管理中心,然后经过车辆控制中心返回本站车站控制器,执行相关命令。
②当系统管理中心正常,车辆控制中心全面故障的情况下,车站工作站,仍将控制命令首先传回系统管理中心,在中心切换车站控制器紧急通路(SCEG),通过车站控制器紧急通路传递至本站车站控制器,以实施有关控制。
③在特殊情况下,由中央授权,车站值班员进行转换操作,车站工作站可以直接与本地车站控制器通信,这时车站工作站可作为现地控制盘使用。
④当系统管理中心、车辆控制中心全面故障,车站工作站,实现对车站控制器及室外设备等车站设备的控制。
⑤车站工作站通过光纤通信网,向系统管理中心传输所管辖范围内的表示信息。
⑥车站工作站,还作为旅客向导系统的接口。
(3)运行图/时刻表调整服务器(SRS)
该服务器的主要功能,是为系统管理中心提供运行图/时刻表调整,和自动排列进路。
时刻表调整服务器还可以提供列车运行预测引擎,也即可以预测当前时间之后的一个时间段内,列车运行情况,以便为旅客向导系统提供准确的信息。
当系统管理中心的时刻表调整服务器与车辆控制中心的主连接发生故障(包括时刻表调整服务器故障)时,自动切换开关,将通信连接切换到备用的时刻表调整服务器计算机。
该服务器还完成与其他系统(SCADA、时钟、无线、消防等)进行接口的功能,并实现与车站工作站的通信。
(4)局域网
网络交换机是冗余的,所以单台网络交换机的故障不会造成通讯的丢失。
网络交换机为系统管理中心工作站、服务器、打印机等提供局域网连接。
系统管理中心调制解调器连接到车辆控制中心的数据传输架的调制解调器,对来自在线时刻表调整服务器的串行请求报文进行调制,对来自车辆控制中心的响应报文信息进行解调,转换成串行数据格式后,提供给通信处理器使用。
(5)加强型的车站控制器紧急通路(SCEG)
当车辆控制中心发生严重故障,调度员可以避开车辆控制中心,从控制中心对道岔进行人工控制,通过系统管理中心直接与车站控制器通信。
车站控制器紧急通路有转换盒和调制解调器等单元组成,转换盒位于运行控制中心的两台协议转换单元(PCU)之间,(每台协议转换单元与车站控制器进行通信)。
协议转换单元与系统管理中心的数据记录服务器有一个串行连接。
这些组件使中央调度员可以转移车辆控制中心对道岔的控制,并通过在系统管理中心输入命令直接与车站控制器通信。
在运行控制中心,激活车站控制器紧急通路开关,从物理上断开了车辆控制中心与车站控制器的通信连接,并将系统管理中心与车站控制器连接起来。
来自车站控制器的信息从车辆控制中心改变路线到协议转换单元。
协议转换单元对信息进行解码,解码后的信息传送到数据记录服务器,并转发至时刻表调整服务器进行处理。
中央调度员,可以在系统管理中心输入道岔转动的请求。
请求被送到协议转换单元,协议转换单元发送请求至车站控制器,车站控制器确保道岔安全转换。
2.运营层——车辆控制中心(VCC)
车辆控制中心提供列车自动防护(ATP)功能。
具体而言
(1)车辆控制中心子系统,完成集中联锁功能和排列进路功能。
也即车辆控制中心接收调度员的指令并按照联锁条件排列进路。
(2)保证列车的自动运行安全间隔和控制列车自动运行。
车辆控制中心保证整个系统中列车的安全间隔。
车辆控制中心以“前一列车尾部”最后一次确认的位置为基础,考虑到道岔故障、区段封锁等影响安全制动的因素,向后续列车传送与先行列车之间的最小的安全间隔距离信息,也即后续列车运行的目标点。
所以列车自动运行而无需司机或调度员干预,是通过列车跟踪和移动授权这两个功能实现。
车辆控制中心通过连续地轮询各个车载控制器,实时地得到列车位置信息来跟踪所有列车;移动授权是通过车辆控制中心连续地向车载控制器发送下一个安全停车位置(目标点)信息来实现。
对列车的控制,由车辆控制中心与车载控制器的通信完成,车辆控制中心可以发出实施牵引或制动,设置速度限制和制动率、停车站以及开、关车门等命令。
车辆控制中心根据最后一次报告的列车车速和位置、行驶方向、前一列车最后一次被证实的位置、限速、停站和地面设备状态等实时信息,生成一个包含有目标点,最大允许速度和其它指令报文。
(3)车辆控制中心还负责对中央紧急停车按钮、车站站台紧急停车按钮、车站现地控制盘的状态进行监督,并作出反应,这些设备的状态信息,由车站控制器向车辆控制中心提供。
3.动作层——加强型车站控制器(STC)、车载控制器(VOBC)、感应环线等的功能。
(1)车载控制器
①确保列车安全运行
车载控制器负责完成车载ATP/ATO功能。
车载控制器不断地与车辆控制中心进行通信,在ATP保护下进行牵引、制动及车门控制。
对超速、目标点冒进、及车门状态进行安全监督,以确保列车在允许的包络线内运行;当无法继续安全运行时,自动实施紧急制动。
车载控制器,负责列车在车辆控制中心控制区域的自动运行,每列车装有主/备两套车载控制器,每端一套,车辆控制中心命令其中一套激活工作,另一套处于备用模式,备用车载控制器,监督工作中的车载控制器单元是否正常工作,如果出现故障或车辆控制中心命令切换时,立即接管工作,激活的车载控制器负责车载ATP/ATO的功能。
正常情况下,激活工作的ATP/ATO,与列车前部司机显示单元通信,当车载控制器故障时,备用车载控制器激活,并与列车前部显示单元通信。
②车载控制器确保列车的定位精度
车载控制器的定位,以敷设于轨道间的感应环线上的信息,和安装于车辆轮轴的速度传感器的信息为基础,每段感应环线都有对应的环线编号,也即车载控制器通过感应环线编号,及计算从每个环线起点开始的环线交叉点,给线路上的列车初步定位,更进一步的精确定位,要通过速度传感器,来测量列车从上一个交叉点起所走行的距离来实现。
车载控制器传送到车辆控制中心的列车位置分辨率为6.25米,它是根据感应环线25m交叉一次,以25m除以4,作为车载控制器向车辆控制中心传送列车所在位置的数据,车载控制器与安装在列车底部的加速计、速度传感器、天线等配合能识别和处理列车车辆的打滑、空转、并进行车轮轮径的补偿。
③解码与编码
车载控制器对发自车辆控制中心的命令进行解码,并控制列车不超出车辆控制中心指令的速度和距离界限;同时向车辆控制中心传送列车位置、速度、行驶方向及车载控制器状态等数据。
车载控制器的校核冗余微处理器,通过冗余性、合理性和一致性校核,测试来自车辆控制中心的报文,然后进行解码,车载控制器只对发给自己的报文作出反应。
⑵感应环线通信系统
感应环线数据通信是车辆控制中心和车载控制器之间交换信息的手段,为了进行准确和可靠的数据通信,与传输数据所伴随的冗余位,保证了被干扰的数据不被接受。
也即通过在所有包含安全信息的数据信息中,使用循环冗余校验(CRC)来实现的。
另外传输的数据被周期性更新。
交叉感应环线与车载控制信息之间进行的双向数据通信。
车辆控制中心呼叫区域内的每一列车,并从每一个车载控制器得到信息,通过“通信安全性测量”来保障车―地通信的可靠性和安全性,。
①车―地通信频率
车到地的通信使用的频率为56KHz;
地到车的通信使用的频率为36KHz。
②车辆控制中心到车载控制器命令报文
报头:
用于确定报文的开始部分;
冗余:
CRC码,提供信息质量/完整性的检查;
信息内容包括:
车载控制器所在环路编号;列车运行目标点;运行方向(上行/下行);车门控制(开/关,左/右);最大速度;车载控制器编号;车载控制器命令启动/备用;用于慢行区的目标速度;使用非安全码向车载控制器传递特殊数据;制动曲线;停车;列车编号;车载旅客广播信息号;下一个目的地(车站或轨道区段);紧急制动控制;当前位置的平均坡度;来自系统管理中心的特殊ATC机车显示信息等。
③车载控制器到车辆控制中心的状态报文
报头:
用于确定报文的开始部分;
冗余码,CRC提供信息质量/完整性的描述。
信息内容包括:
车载控制器编码;列车操作模式;紧急制动状态;列车门状态(开/关);列车完整性状态;车载控制器启动/备用;车载控制器所在地实际环路的编号;运行方向(上行/下行);列车所在环路的位置;实际速度;故障报告(例如:
自动门切换位置、ATP倒车状态、无人驾驶状态)等。
(3)加强型车站控制器
车站控制器的控制功能由来自车辆控制中心的指令报文启动,车站控制器采集所有轨旁设备的状态信息,并报告给车辆控制中心。
①正常运营情况下,所有联锁功能都由车辆控制中心完成。
车站控制器可在现地操纵模式下,完成道岔转动。
也即在中央授权下,将车站控制器所在地的车站工作站,与车站控制器相连,选择现地操纵模式。
而当车辆控制中心与系统管理中心故障时,车站控制器自动转为现地操纵模式。
当车站控制器处于现地操纵模式时,车站工作站就可以向车站控制器发送指令,并接收车站控制器的状态信息。
②一旦车站控制器处于现地操纵模式时,道岔的只能由车站工作站转换,而不是由车辆控制中心操纵。
处于现地操纵模式下的道岔,不允许自动运行模式的列车和ATP防护人工模式的列车通过,只有限制人工模式及非限制模式的列车通过。
①带冗余的双CPU的固态联锁控制器(INTERSIG)是车站控制器的主要单元。
车站控制器
通过双共线调制解调器链路与车辆控制中心通信。
车站控制器为车辆控制中心提供联锁逻辑信息;而车辆控制中心将联锁逻辑命令发送给车站控制器,车站控制器执行车辆控制中心的命令,对相应的轨旁设备进行控制。
所以车站控制器所提供的功能可以归纳为:
道岔控制和表示采集;监督并报告,中央紧急停车按钮、车站现地控制盘上紧急停车按钮、及站台紧急停车按钮的状态;信号机的点灯和灯丝报警;与车辆控制中心通信;与车站工作站通信等等。
 升级会员
升级会员 