平面度的测量.docx
《平面度的测量.docx》由会员分享,可在线阅读,更多相关《平面度的测量.docx(11页珍藏版)》请在冰豆网上搜索。
平面度的测量
平面度测量
工作单位:
广东技术师范学院机电学院机械精度检测实验室刘涵章
关键词:
平面度平面度误差三远点法三角形准那么对角线准那么对角线法
一、什么是平面度
二、平面度误差值的各种评定方法
三、误差值评定的步骤:
四、实验教学中的实验仪器和实验步骤:
五、平面度误差值的各种评定方法应用举例
六、总结
一、什么是平面度
首先谈一谈什么是平面度,平面度就是实际平面相对理想平面的变动量。
换句话说,就是被测平面具有的宏观凹凸高度相对理想平面的偏差。
也可以说成是平整程度。
平面度公差是实际外表对平面所允许的最大变动量。
也就是用以限制实际外表加工误差所允许的变动范围。
这个变动范围可以在图样上给出。
〔可以插入一个图〕
二、平面度误差值的各种评定方法
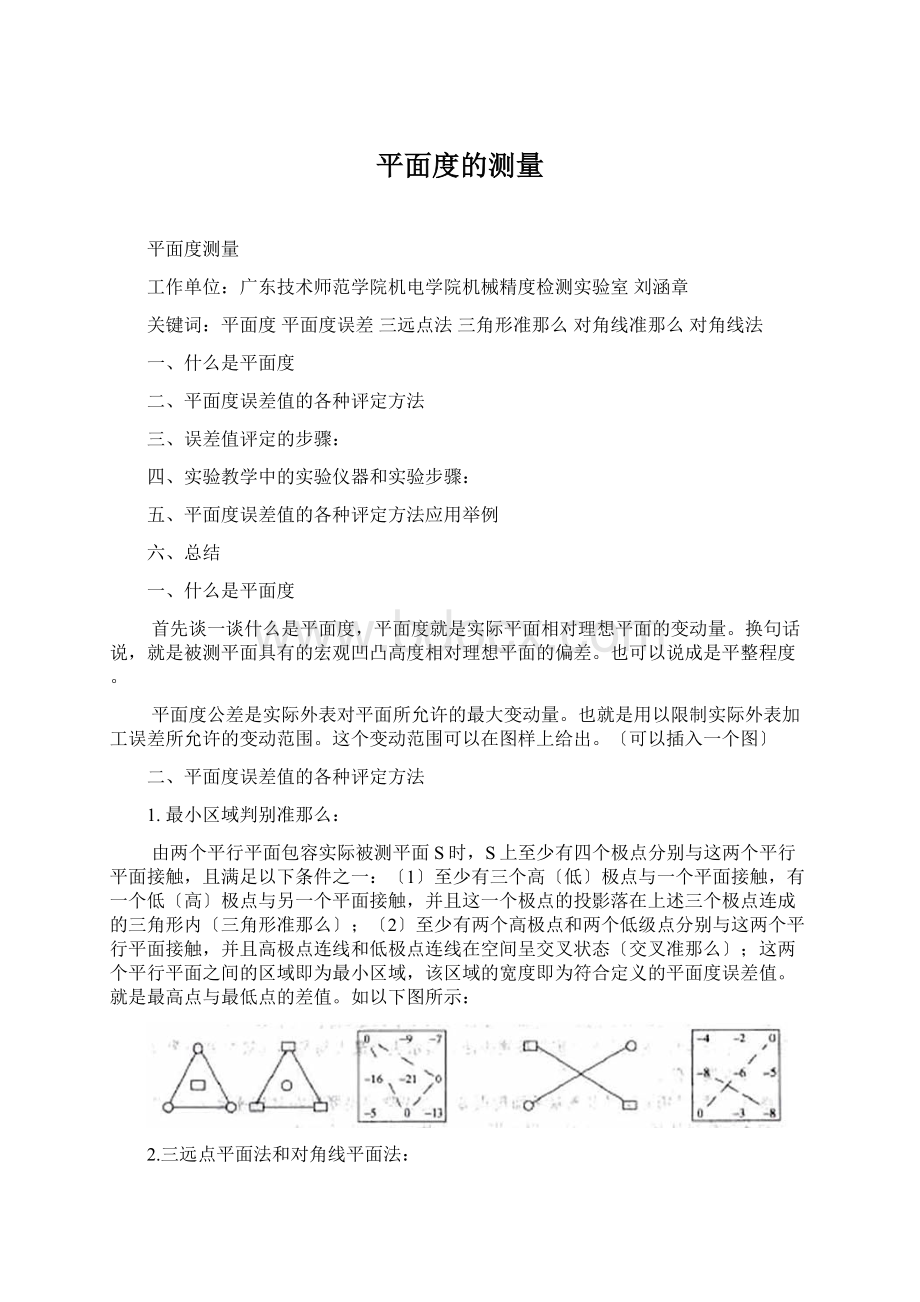
1.最小区域判别准那么:
由两个平行平面包容实际被测平面S时,S上至少有四个极点分别与这两个平行平面接触,且满足以下条件之一:
〔1〕至少有三个高〔低〕极点与一个平面接触,有一个低〔高〕极点与另一个平面接触,并且这一个极点的投影落在上述三个极点连成的三角形内〔三角形准那么〕;〔2〕至少有两个高极点和两个低级点分别与这两个平行平面接触,并且高极点连线和低极点连线在空间呈交叉状态〔交叉准那么〕;这两个平行平面之间的区域即为最小区域,该区域的宽度即为符合定义的平面度误差值。
就是最高点与最低点的差值。
如以下图所示:
2.三远点平面法和对角线平面法:
平面度误差值还可以用对角线平面法和三远点法评定。
对角线平面法是指以通过实际被测平面一条对角线〔两个角点的连线〕且平行另一条对角线〔其余两个角点的连线〕的平面作为评定基准,取各测点相对于它的偏离值中最大偏离值〔正值或零〕与最小偏离值〔零或负值〕之差作为平面误差值。
三远点平面法是指以通过被测平面上相距最远的三个点构成的平面作为评定基准,取各测点相对于它的偏离值中最大偏离值〔正值或零〕与最小偏离值〔零或负值〕之值差作为平面度误差值。
应当指出,由于从实际被测平面上选取相距最远的三个点有多种可能,因此按三远点平面法评定的平面度误差值不是唯一的,有时候差异颇大。
评定过程就是根据上述判别准那么去寻找符合最小条件的理想平面位置的过程。
可有多种数据处理方法,其中旋转法为最根本的方法。
此法适用于前述各种测量方法获得的统一坐标值的数据处理。
三、误差值评定的步骤:
1)建立零平面:
目的是有利于观察。
2)选择旋转轴:
以使各点数值关系符合判别准那么。
3)确定旋转量:
要使旋转后两目标点的数值相等。
4)计算变换后的数值:
此时仍未符合判别准那么。
5)再选旋转轴;
6)确定旋转量;
7)计算变换后的数值,直至符合准那么。
四、实验教学中的实验仪器和实验步骤:
图
图
1.实验原理:
把被测样板安放在测量平板上,以测量平板为测量基准,按网格位置记录各点读数值。
选择评定法那么,评定被测样板的平面度误差合格性。
运用千分表读数,实验仪器如上图所示。
2.实验内容及步骤:
1)按3行,3列等距离划分被测样板。
2)把被测样板安放在测量平板上,分别测量九点位置的读数值。
3)选一种评定方法评定平面度误差。
4〕平面度公差12.5μm。
五、平面度误差值的各种评定方法应用举例
1、三远点法
三远点评定法举例:
坐标位置图:
(图2-4-1)
0+1+2
-7-7.3-6
-7.4-8.3-7.2
按其相应位置测量出的数据→
A1,1A1,2A1,3
A2,1A2,2A2,3
A3,1A3,2A3,3
设:
A1,1=A1,3=A3,2三点为一平面。
得方程组:
0=2X+0Y-6=1X+2Y-11
解方程得:
X=+3Y=+4
把X;Y值代入各相应位置,即:
代入X、Y的值再整理得到:
求出〔A1,1=A1,3=A3,2〕三点(等值)为一平面后,以此作为基准J平面。
平移J平面到最高点〔+1.9〕处为高平面E,平移J平面到最低点〔-3.7〕处为低平面I,高平面E与低平面I所包容的区域,即为该平面度误差。
误差=max-min=(+1.9)-(-3.7)=5.6μm
我们在文章的开头有讲到,如果选择不同的三个点,所得到的的误差值是不同的,下面我们可以尝试一下,选择A12、A31、A33,会得到怎样的结果
坐标位置图:
(图2-4-1)
按其相应位置测量出的数据→
设:
A1,2=A3,1=A3,3三点为一平面。
得方程组:
1X+0Y+1=0X+2Y-7.4=2X+2Y-7.2
解方程得:
X=-0.1Y=+4.15
把X;Y值代入各相应位置,即:
代入X、Y的值再整理得到:
求出〔A1,2=A3,1=A3,3〕三点(等值)为一平面后,以此作为基准J平面。
平移J平面到最高点〔+1.8〕处为高平面E,平移J平面到最低点〔-3.25〕处为低平面I,高平面E与低平面I所包容的区域,即为该平面度误差。
误差=max-min=(+1.8)-(-3.25)=5.05μm,得到了不相同的结果,可以了解到,所选择的的三个点不同时,所得到的的误差结果是不一样的。
这是三远点法求平面度误差的特征。
2、三角形准那么
至少有三个高〔低〕极点与一个平面接触,有一个低〔高〕极点与另一个平面接触,并且这一个极点的投影落在上述三个极点连成的三角形内〔三角形准那么〕;我们来观察以上数据的结果:
0〔A1,1〕0.9〔A1,2〕+1.8〔A1,3〕
-2.75〔A2,1〕-3.25〔A2,2〕-2.05〔A2,3〕
+0.9〔A3,1〕-0.1〔A3,2〕+0.9〔A3,3〕
我们可以看出最高点1.8没有包括在三个0.9的数据所形成的三角形之内。
因此,不符合三角形准那么,这就需要对各点的坐标再一次地进行旋转。
现在选择A13、A33、A31作为三个最高点,对各点坐标进行旋转。
0X+0Y+01X+0Y+0.92X+0Y+1.8
0X+1Y-2.751X+1Y-3.252X+1Y-2.05
0X+2Y+0.91X+2Y-0.12X+2Y+0.9
2X+0Y+1.8=0X+2Y+0.9=2X+2Y+0.9
解的X=0,Y=0.45,代入以上各个点的方程之中,可以得到以下的结果:
00.9+1.8
-2.30-2.8+1.6
+1.8-0.8+1.8
从以上数据中可以看出,最低点-2.8在三个最高点形成的三角形之中,符合三角形准那么。
误差=1.8-〔-2.8〕=4.6μm。
3、对角线法
A1,1A1,2A1,3
A2,1A2,2A2,3
A3,1A3,2A3,3
各个点的下标:
0+1+2
-7-7.3-6
-7.4-8.3-7.2
使用以下这组数据作为例子:
0X+0Y+01X+0Y+12X+0Y+2
0X+1Y-71X+1Y-7.32X+1Y-6
0X+2Y-7.41X+2Y-8.32X+2Y-7.2
各个点坐标旋转方程如下:
对角线相等,所以0X+0Y+0=2X+2Y-7.2,0X+2Y-7.4=2X+0Y+2,解得X=—0.55,Y=4.15,将X、Y代回以上各个方程中,获得最终的结果:
0-0.10.9
-2.85-3.7-2.95
0.9-0.550
平面度误差=0.9-〔-3.7〕=4.6μm。
4、交叉准那么
+5〔A1,1〕-3〔A1,2〕+8〔A1,3〕
【旋转轴数值不变】【+〔-0.75〕】【+〔-1.5〕】
-1〔A2,1〕-2〔A2,2〕-4〔A2,3〕
【+0.75】【旋转轴数值不变】【+〔-0.75〕】
+5〔A3,1〕+4〔A3,2〕-1〔A3,3〕
【+1.5】【+0.75】【旋转轴数值不变】
以上一组的数据为例,先以A1,1A3,3为旋转轴,得到如下数据
+5〔A1,1〕-3.75〔A1,2〕+6.5〔A1,3〕
-0.25〔A2,1〕-2〔A2,2〕-4.75〔A2,3〕
+6.5〔A3,1〕+4.75〔A3,2〕-1〔A3,3〕
再进行旋转,以A3,1A1,3为轴进行旋转,
+5〔A1,1〕-3.75〔A1,2〕+6.5〔A1,3〕
【+〔-1〕】【+〔-0.5〕】【旋转轴数据不变】
-0.25〔A2,1〕-2〔A2,2〕-4.75〔A2,3〕
【+〔-0.5〕】【旋转轴数据不变】【+0.5】
+6.5〔A3,1〕+4.75〔A3,2〕-1〔A3,3〕
【旋转轴数据不变】【+0.5】【+1】
得到如下数据:
+4〔A1,1〕-4.25〔A1,2〕+6.5〔A1,3〕
-0.75〔A2,1〕-2〔A2,2〕-4.25〔A2,3〕
+6.5〔A3,1〕+5.25〔A3,2〕0〔A3,3〕
由以上数据可知,A12=A23,由这两个最低点所确定直线与两个最高点A31=A13所确定的直线在空间呈交叉状态,所以由这组数据测得的平面度误差=6.5—〔—4.25〕=10.75μm。
接下来,我们来看某个平面上一组五行五列的数据。
〔1〕先将平面上所有的数值都减去19,得到第二个表格的读数。
〔2〕如下图,以0---〔-9〕为旋转轴,旋转后得到第三个表格的数据。
〔3〕如下图,以〔-46〕-------〔-70〕为旋转轴,旋转得到最后的表格。
〔4〕可以看到,两个最低点的数值为〔-4.5〕,两个最高点的数值为〔-70〕,因此,该平面的平面度的误差=-4.5-〔-70〕=65.5
六.总结
无论是取点多,还是取点少,都可以列方程计算出旋转量,如果是五行五列,甚至是更多的行列,有可能就要进行屡次的旋转。
因为,旋转一两次,不一定就能符合判别准那么。
最后,总结一些平面度的实验方法:
1、平晶干预法:
用光学平晶的工作面表达理想平面,直接以干预条纹的弯曲程度确定被测外表的平面度误差值。
主要用于测量小平面,如量规的工作面和千分尺测头测量面的平面度误差。
平面是由直线组成的,因此直线度测量中直尺法、光学准直法、光学自准直法、重力法等也适用于测量平面度误差。
测量平面度时,先测出假设干截面的直线度,再把各测点的量值按平面度公差带定义(见形位公差)利用图解法或计算法进行数据处理即可得出平面度误差。
也有利用光波干预法和平板涂色法测量平面误差的。
光波干预法常利用平晶进行,图为测量所得的不同干预条纹。
图中a的干预条纹是直的,而且间距相等,只在周边上稍有弯曲。
这说明被检验外表是平的,但与光学平晶不平行,而在圆周局部有微小的偏差。
图中b的干预条纹弯曲而且间隔不相等,说明被检验外表是球形的,平晶有微小倾斜。
条纹弯曲度约为条纹间距的1.5倍,表示平面度误差为1.5×0.3μm=0.45μm。
图中c的干预条纹呈圆形,同样说明被检验外表是球形外表。
将条纹数目乘以所用光束波长的一半,即得所求的平面误差为1.5×0.3μm=0.45μm。
图中d的干预条纹成椭圆形排列,说明被检验外表是桶形的。
可以把干预图案作为被检验外表的等高线,因此可以画出该外表的形状。
这种方法仅适宜测量高光洁外表,测量面积也较小,但测量精确度很高。
平面是由直线组成的,因此直线度测量中直尺法、光学准直法、光学自准直法、重力法等也适用于测量平面度误差。
测量平面度时,先测出假设干截面的直线度,再把各测点的量值按平面度公差带定义(见形位公差)利用图解法或计算法进行数据处理即可得出平面度误差。
2、打表测量法:
打表测量法是将被测零件和测微计放在标准平板上,以标准平板作为测量基准面,用测微计沿实际外表逐点或沿几条直线方向进行测量。
打表测量法按评定基准面分为三点法和对角线法:
三点法是用被测实际外表上相距最远的三点所决定的理想平面作为评定基准面,实测时先将被测实际外表上相距最远的三点调整到与标准平板等高;对角线法实测时先将实际外表上的四个角点按对角线调整到两两等高。
然后用测微计进行测量,测微计在整个实际外表上测得的最大变动量即为该实际外表的平面度误差。
3、液平面法:
液平面法是用液平面作为测量基准面,液平面由“连通罐〞内的液面构成,然后用传感器进行测量。
此法主要用于测量大平面的平面度误差。
4、光束平面法:
光束平面法是采用准值望远镜和瞄准靶镜进行测量,选择实际外表上相距最远的三个点形成的光束平面作为平面度误差的测量基准面。
5、激光平面度测量仪:
激光平面度测量仪用于测量大型平面的平面度误差。
6、利用数据采集仪连接百分表测量平面度误差的方法。
测量仪器:
偏摆仪、百分表、数据采集仪。
测量原理:
数据采集仪可从百分表中实时读取数据,并进行平面度误差的计算与分析,平面度误差计算工式已嵌入我们的数据采集仪软件中,完全不需要人工去计算繁琐的数据,可以大大提高测量的准确率。
 升级会员
升级会员 