我的matlab第八章作业.docx
《我的matlab第八章作业.docx》由会员分享,可在线阅读,更多相关《我的matlab第八章作业.docx(19页珍藏版)》请在冰豆网上搜索。
我的matlab第八章作业
8.3某随动系统的微分方程为:
已知:
。
试分别就K=2.5、5.0、12.5三种情况对系统进行仿真,考擦
的动态性能。
解:
由分析可知A=[0,1,0;0,0,1;-40k/3,-40/3,-10;]
B=[0;0;k;],c=[1,0,0]
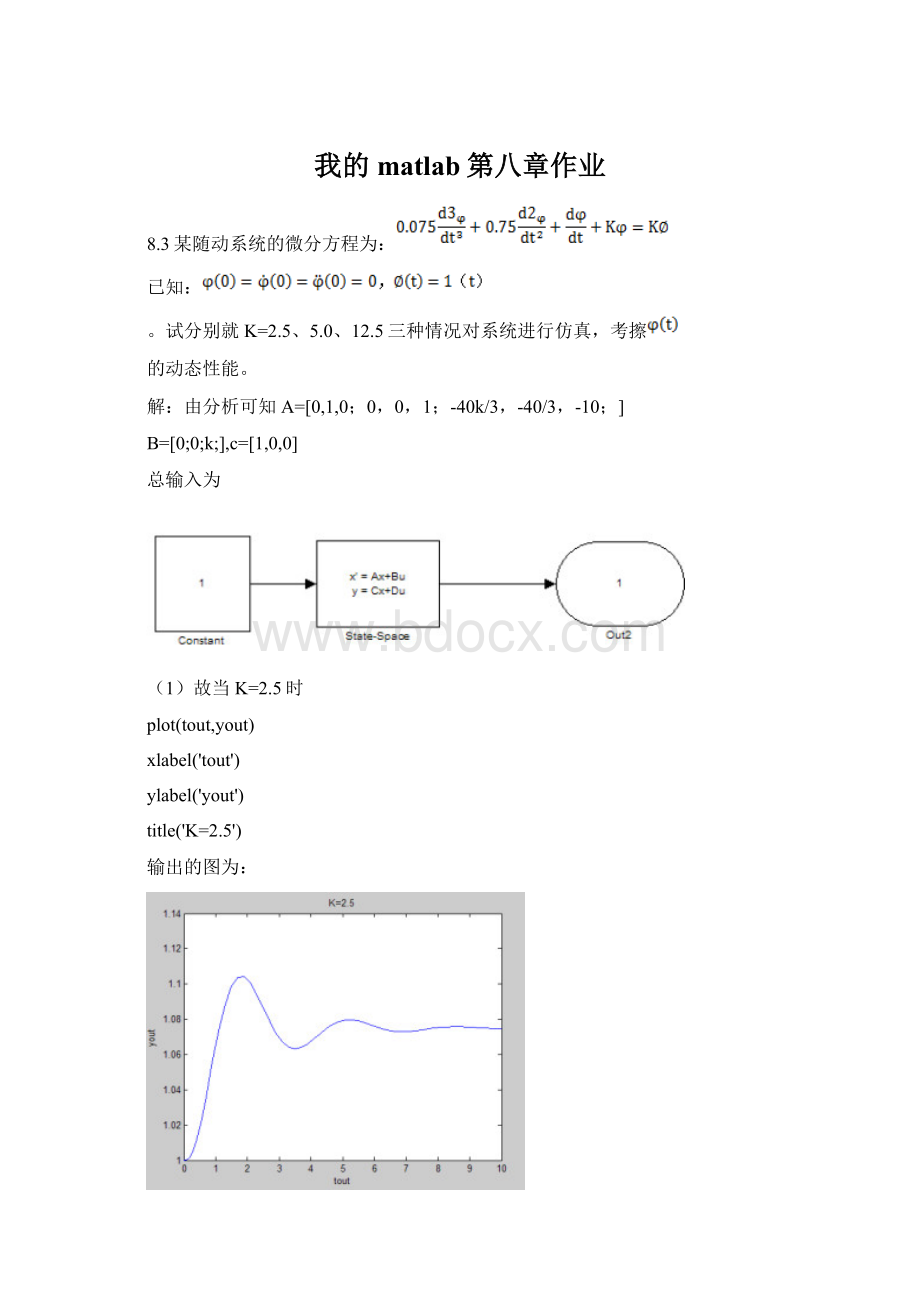
总输入为
(1)故当K=2.5时
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('K=2.5')
输出的图为:
(2)当K=5时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('K=5')
输出的图为:
(3)当K=12.5时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('K=12.5')
输出图为:
8.2已知系统模型
当p=1、2、10时,对以上几种情况进行仿真,并比较不同输入幅值下的系统输出响应。
解:
由分析可知:
A=[0,1;-1,-2;],B=[p;p],c=[1,0,0]
(1)故总输入的仿真式为:
<1>当p=1输入为u(t)=1时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=1')
<2>当p=2,输入为u(t)=1时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=2')
输出为:
<3>当p=10输入为u(t)=1时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=10')
输出为:
(2)当输入为u(t)=t时,
总输入函数为:
<1>当p=1时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=1')
输出为:
<2>当p=2时
输入为
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=2')
<3>当p=10时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=10')
(3)当输入为u(t)=sin(t)时
输入总函数为
<1>当p=1时,
输入为plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=1')
输出为:
<2>当p=2时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=2')
输出为
<3>当p=10时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=10')
输出为:
(4)当输入为:
u(t)=1+sin(t)时
输入总函数为
<1>当p=1时
输入为
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=1')
输出为
<2>当p=2时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=2')
输出为
<3>当p=10时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=10')
输出为:
(5)当输入为u(t)=1+t+sin(t)
输入总函数为
<1>当p=1时
输入为
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=1')
输出为
<2>当p=2时
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=2')
输出为
<3>当p=10时
输入为
plot(tout,yout)
xlabel('tout')
ylabel('yout')
title('p=10')
输出为
8.3对如图所示8.52所示的系统进行仿真。
(1)输入信号为r(t)=1(t);
(2)输入信号为如下分段函数
解:
输入总函数为:
(1)
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
输出为:
(2)
当输入为分段函数时:
输入为:
plot(tout,yout)
xlabel('tout')
ylabel('yout')
输入为:
输出为:
8.4液压调速系统结构如图8.53所示,在稳定的情况下在V环节前加上f=-1的阶跃扰动,试求系统在该扰动作用下IV环节和V环节的动态过程。
解:
(1)扰动在四环节的动态过程
输入为:
Plot(tout,yout)
输出为:
(2)扰动在五环节的动态过程:
输入为
Plot(tout,yout)
输出为:
8.5某控制系统如图8.54所示,选择增益K的值,使系统阶跃响应的超调量小于20%,且调节时间小于5S。
解:
由试探可知当K=1000时符合条件
其输出为:
8.7潜艇潜水深度控制系统的简化结构如图8.56所示,求系统在阶跃作用下的动态响应,并观察当舵机的K增大时系统动态性能有何改变。
由分析可知:
取K分别为1,2,4,10,20时图形分别为:
当K=1时输出为
当K=2时输出为
当K=4时输出为
当K=10时输出为
当K=20时输出为
8.8非线性控制系统如图8.57所示,求系统在有饱和非线性和无饱和非线性两种情况下的动态响应,分析饱和非线性对系统动态性能的影响。
解:
无饱和非线性的总输入为:
输出为
当是有饱和非线性时输入为
输出为
 升级会员
升级会员 