数字电路基础D脉冲波形发生器及整形电路.docx
《数字电路基础D脉冲波形发生器及整形电路.docx》由会员分享,可在线阅读,更多相关《数字电路基础D脉冲波形发生器及整形电路.docx(11页珍藏版)》请在冰豆网上搜索。
数字电路基础D脉冲波形发生器及整形电路
7.1脉冲波形发生器及整形电路
7.1.1施密特触发器
施密特触发器(SchmittTrigger)是一种经常使用的脉冲波形变换电路。
它具有两个重要的特性:
①施密特触发器是一种电平触发器,它能将变化缓慢的信号(如正弦波、三角波及各种周期性的不规则波形)变换为边沿陡峭的矩形波;
②输入信号从低电平上升的过程中,电路状态转换时对应的触发转换电平(阀值电平),与输入信号从高电平下降的过程中对应的触发转换电平是不同的,即电路具有回差特性。
由于施密特触发器的广泛应用,所以无论是在TTL还是CMOS电路中,都有集成施密特触发器产品。
下面以典型的TTL集成施密特触发器SN7413为例,分析施密特触发器。
1.电路结构及工作原理
(1)电路结构
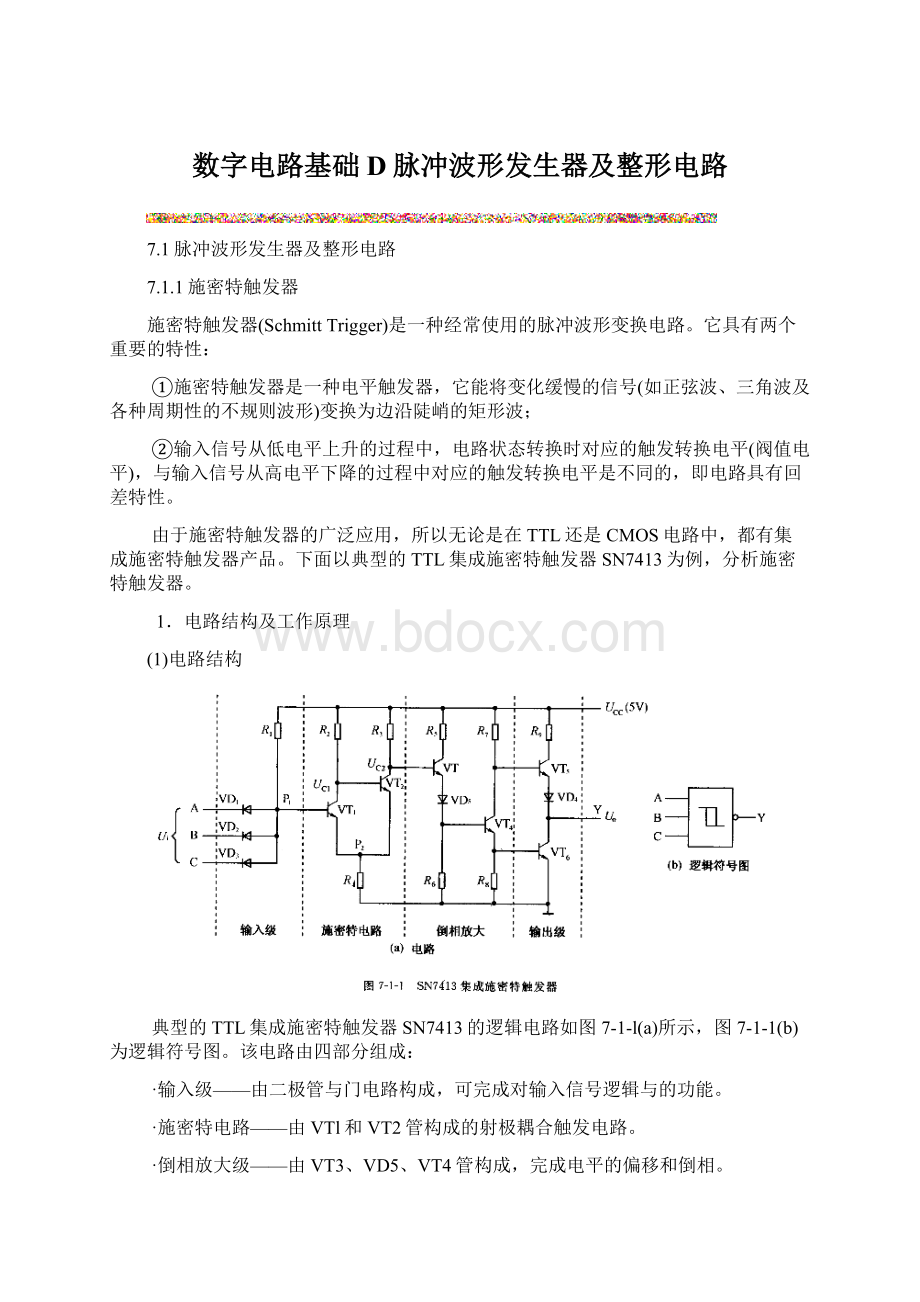
典型的TTL集成施密特触发器SN7413的逻辑电路如图7-1-l(a)所示,图7-1-1(b)为逻辑符号图。
该电路由四部分组成:
·输入级——由二极管与门电路构成,可完成对输入信号逻辑与的功能。
·施密特电路——由VTl和VT2管构成的射极耦合触发电路。
·倒相放大级——由VT3、VD5、VT4管构成,完成电平的偏移和倒相。
·输出级—由VT5和VT6构成推拉输出级。
图7-1-1SN7413集成施密特触发器
电路的输入级附加了与逻辑功能:
在电路的输出级附加了反相的逻辑功能,所以它又称施密特触发器与非门。
(2)电路的工作原理
从电路的组成可以看出,整个电路的核心部分是由VTl、VT2、R2、R3和R4组成的施密电路,设电路的输入电压为三角波,如图7-l-2(a)所示。
其工作原理如下:
①当输入电压Ui为低电平时,电路中Pl点为低电平,VTl管截止,VT2管饱和导通,VT2管的发射极电流在电阻R4上的电压UR4=Ie2R4,即为P2点的电压,VT2管的集电极电压Uc2(=Uces2十Ie2R4)使VT3、VT4、和VT6管均截止,电路的输出Uo为高电平。
②当输入电压Ui由低电平逐渐上升,并使VTl管的Ubel>0.7V时,VT1管转为导通。
电路发生如下所示的正反馈链锁反应过程
Ui↑→Up1↑→ic1↑→Uc1↓→ic2↓→Up2↓→Ub1↑→|
↑________________________________________|
导致电路迅速翻转到VTl管导通,VT2管截止的状态。
此时,流过R3的电流使VT2管饱和导通,ie2在R6上的压降足以使VT4、VT6管饱和导通。
所以此时电路的输出电压为低电平。
由以上分析可知,电路的上限触发阀值电平为=Ie2·R4
若输入电压继续土升,电路的状态不会改变,输出电压仍为低电平。
③输入电压Ui达最高值后开始下降,当下降到Ui=UT(+),时,电路的状态仍保持不变,这是因为此时VTl管饱和导通,VT2截止的状态,使电路依旧处于输出为低电平的状态。
④当输入电压飘继续下降到Ui=UT(-)=Ie1R4时,电路又发生另一个正反馈链锁反应过程:
Ui↓→Up1↓→ic1↓→Uc1↑→ic2↑→Up2↑→Ub1↓→|
↑_______________________________________|
导致电路迅速返回到VTl管截止,VT2管导通的状态,电路的输出电压U。
由低电平跃跳到高电平。
若Ui继续下降,电路仍然保持在这种状态。
(3)电路的滞后特性
电路的滞后特性又称为回差特性。
由上述分析可知,输入电压Ui在上升和下降过程中,电路发生状态转换的阀值电平的值是不同的,则称电路有滞后电压传输特性,如图7-l-2(b)所示,其滞后电压为
ΔUT=UT(十)一UT(—)=Ie2R4一Ie1R4
此关系曲线就是施密特触发器的电压传输特性,施密特触发器的状态转换要由输入信号来触发,同时输出的高、低电平也依赖输入信号的高、低电平来维持:
有时也用图7-1-2(c)表示施密特触发器的逻辑符号。
2.施密特触发器的应用
(1)用于波形变换
施密特触发器能将正弦波、三角波及各种周期性的不规则波形变换为边沿陡峭的矩形脉冲输出。
图7-1-3所示,就是将由直流分量和三角波叠加的信号,经施密特触发器变换成同频率的矩形脉冲信号的例子。
(2)用于脉冲整形
若施密特触发器的输入信号是一种在脉冲的顶部和前后沿均受到严重干扰、发生畸变的电路的抗干扰能力,收到满意的整形效果。
(3)用于脉冲信号的鉴幅
当施密特触发器的输入信号是一串幅度不等的脉冲时,可通过调整电路的UT(+),和UT(-),使只有当输入信号的幅度超过UT(+)的脉冲时才能使施密特触发器的状态翻转,从而得到所需的矩形脉冲信号。
施密特触发器能将幅度大于UT(+)的脉冲选出,具有脉冲鉴幅的能力。
施密特触发器用于脉冲幅度鉴别;
7.1.2单稳态触发器
单稳态触发器的工作特性如下
①电路有一个稳定状态和一个暂稳状态。
②在外加触发信号的作用下,电路才能从稳定状态翻转到暂稳态。
③暂稳态维持一段时间后,电路将自动返回到稳定状态。
暂稳态的持续时间与外加触发信号无关,仅取决于电路本身的参数。
集成单稳态触发器作为一个标准器件,将元、器件集成于同一芯片上,并且在电路上采取了温漂补偿措施,所以电路的稳定度高。
器件内部通常附加上升沿和下降沿的控制和置零等功能,同时可对外接电阻和电容进行调节,使用非常方便。
常用的集成单稳态触发器,TTL型有SN74121,CMOS型有CC4098和CCl4528等产品。
下面我们以TTL集成单稳态触发器SN74121为例,分析单稳态触发器。
1.电路结构及工作原理
(1)电路结构
典型的集成TTL单稳态触发器,TTL74121的逻辑电路如图7-1-6所示。
电路由四部分组成:
·触发输入——由G1和G2组成的电路用于实现上升沿触发或下降沿触发的控制。
·窄脉冲形成—G3和G4组成的RS触发展是一个触发窄脉冲形成电路。
·基本单稳态触发器—由G5、G6、G7和外接电阻RexT(或内部的定时电阻Rint)、外接电容CexT组成。
·输出级——由G8和G9组成的电路用于提高电路的带负载能力。
脉冲的宽度由定时电路的元件决定,定时电路的元件是外接的。
定时电容连接在芯片的10和11引脚之间。
定时电阻有两种选择方式:
①利用芯片内部的定时电阻Rint,(Rint的阻值不能太大,约为2k)。
此时,芯片的9号引脚应连接到电源Ucc端(14号引脚)。
②利用外接电阻(阻值应在1.4—40k之间),此电阻应接在11号和14号引脚之间,9号引脚应悬空。
(2)电路工作原理:
①电路的稳定状态
当没有触发信号输入时,电路处于稳定状态。
故电路的输出Q=0。
②电路经触发翻转到暂稳态
SN74121集成单稳态触发器有3个触发输入端(A1、A2和B),只要有如下两种触发方式,电路均可由稳定状态翻转到暂稳状态。
.Al和A2有1个(或两个)为低电平,B产生0到1的正跳变。
.A和B均为高电平,A中有1个(或两个)产生1到0的负跳变。
电路经触发,芯片内的基本单稳态触发器由稳定态翻转到暂稳态(即Q由O→l)1,而
由1→0)。
由此可见,芯片内的RS触发器是一个触发窄脉冲形成电路。
③电路自动返回到初始稳态
电路经触发进入暂稳态后,外接定时电容CexT充电,经0.7RexTCexT时间后,电路自动返回到初始稳定状态(Q=0)。
SN74121集成单稳态触发器的功能如表7-l-1所示.
2.单稳态触发器应用单稳态触发器是数字系统中最常用的单元电路,常用于以下几方面;
(1)脉冲展宽
由SN7412l集成单稳态触发器构成的脉冲展宽电路如图7-l-7(a)所示,图7-1-7(b)为其工作波形。
由图可见,触发输入端Al=A2=0,在触发输入端B加一个正向窄脉冲Ui,在电路的输出端Q就可得到一个宽脉冲。
其简要工作过程是:
当Ui由0跳变到l时,单稳态电路被触发进入暂稳态,经0.7RextCext时间后,电路将自动返回到初始稳定状态。
输出端Q输出一个脉宽可由外接元件Rext、Cext调节的脉冲信号,其脉冲宽度为:
”
tw=0.7RexT·CexT
(2)脉冲延迟
由CC4098单稳态触发器构成的脉冲延迟电路如图7-l-8(a)所示,其工作波形如图7-l-8(b)所示。
CC4098有两组独立的单稳态触发器,每组触发器有两个触发输入端,上升沿触发输入端A和下降沿触发输入端B,R端为清0端。
当输入脉冲Ui家道单稳态触发器的上升沿触发输入端A,在Ql端得到一个展宽的正向脉冲,脉冲宽度为tw1,,在twl下降沿(B)又触发另一个单稳态触发器,在Q2端输出一个脉宽为tw2的正向脉冲,该电路对输入脉冲认的延迟时间为:
tw1十tw2二0.7RextlCexTl十0.7RexT2CexT2
可通过调节外接电阻和电容的值来调节延迟时间。
(3)脉宽鉴别
由SN74121集成单稳态触发器构成的脉宽鉴别电路(俗称噪声消除电路)如图7-l-9(a)所示。
输入信号Ut加到单稳态触发器输入端B、D触发器的数据端和置“0”端。
调节外接定时元件RexT和CexT,使单稳态触发器的输出脉冲宽度略大于噪声脉冲的宽度而小于信号脉冲的宽度。
当带有噪声的输入信号认的上升沿触发单稳态触发器时,在其输出端输出一个脉宽大于噪声脉冲宽度而小于信号脉冲宽度的负脉冲,作为D、触发器的时钟信号。
这样,当Q上升沿来到时,若有信号输入,D触发输出端Uo=1,当信号消失,D触发器被置0(即Uo=0)。
若信号中含有噪声尖脉冲,其尖脉冲上升沿触发单稳电路。
由于单稳态触发器产生的输出脉冲的宽度大于噪声脉冲宽度,所以当单稳电路
端输出上升沿时,噪声脉冲消失,从而消除了信号中的噪声成分,其工作波形如图7-l-9(b)所示。
图7-1-9单稳态噪声消除电路。
单稳态触发器还可用于构成定时电路、方波产生电路等等。
7.1.3多谐振荡器
多谐振荡器是一种自激振荡器,没有稳定状态,不需要外加触发信号,只要接通电源就能自动产生矩形脉冲信号。
由于矩形波含有丰富的谐波分量,所以习惯上称这种自激振荡器为多谐振荡器。
下面扼要介绍多谐振荡器的工作原理。
1.环形振荡器
最简单的环形振荡器是利用门电路的传输延迟时间将奇数个反相器首尾相接而构成的,从任何一个门的输出端都可得到高、低电平交替出现的方波。
图7-l-10(a)所示的电路是由3个反相器组成的环形振荡器,图7-1-10(b)所示是该电路的工作波形图。
’
设3个反相器的特性完全一致,传输延迟时间均为tpd。
假定由于某种原因G1由高电平跳变为低电平,经过Gl门的传输延迟时间tpd后,Ui2由低电平跳变为高电平,再经过G2门的传输延迟时间tpd后,Uis由高电平跳变为低电平,经过G3门的传输延迟时间tpd后,输出Uo由低电平跳变为高电平,同时输入Gl也自动由低电平跳变为高电平。
门Gl、G2、G3将依次翻转,经过3tpd的时间以后,输出比由高电平跳变为低电平,同时输入Gl也自动由高电平跳变为低电平。
再经过3tpd以后,输入Gl又自动由高电平跳变为低电平,周而复始,产生了自激振荡,形成矩形波形。
由图7-1-10(b)可见,其振荡周期了=6tpd。
门电路的传输延迟时间很短,TTL电路只有几十纳秒,CMOS电路也不过一二百纳秒,所以使用环形振荡器获得低一些的振荡频率是很困难的,振荡周期短,频率不可调,虽然电路简单,但并不实用。
为了使振荡频率降低,同时做到振荡频率可调节。
下面介绍环形振荡器的改进电路。
2.RC环形多谐振荡器
在环形振荡器中增加RC电路作延迟环节,构成RC环形多谐振荡器,如图7-11(a)所示,图7-1-11(b)为其工作波形。
多谐振荡器没有稳定状态,仅有两个暂稳态。
电路由一个暂稳态自动翻转到另一个暂稳态,是由电容的充放电实现的。
可以通过调节及或C的值来调节振荡频率。
由于RC电路的延迟时间远远大于门的传输延迟时间小,分析时可以忽略知,认为每个门的输入、输出的跳变同时发生。
RC环形多谐振荡器的工作过程简述如下,设通电后,电路已处于正常工作状态。
(1)第一暂稳态及其自动翻转过程
设G3的输出U。
由低电平跳变为高电平,Uo1由高电平跳变为低电平,Ui2由高电平跳变为低电平,Uuo2由低电平跳变为高电平,同时Ui2经过电容C使Ui3首先由高电平跳变为低电平,维持Uo为高电平,此时为第一暂稳态。
在此期间Uo2通过电阻R给电容器C充电,使Ui3的电位逐渐上升。
充电回路Uo2→R→Ui3→C→Uo1。
当Ui3上升到大于阀值电压UT时,G3导通,使Uo由高电平跳变为低电平,至此,第一暂稳态结束,电路自动翻转到第二暂稳态。
(2)第二暂稳态及其自动翻转过程
G3的输出U。
由高电平跳变为低电平,Gl由低电平跳变为高电平,Uo1由高电平跳变为低电平,同时Ui2经过电容首先使Ui3由低电平跳变为高电平,维持Uo为低电平,此时为第二暂稳态。
在此期间Uol通过电阻R给电容器C反向充电,使Ui3的电位逐渐下降。
充电回路Uol→C→Ui3→R→Uo2。
当Ui3下降到小于阀值电压UT时,G3截止,使Uo由低电平跳变为高电平,至此,第二暂稳态结束,电路自动翻转到第一暂稳态。
使Uo由低电平跳变为高电平,Uo1由高电平跳变为低电平,Uo2由低电平跳变为高电平,同时使Ui3由高电平跳变为低电平,维持U。
为高电平。
依靠电容器C的充放电过程,使两个暂稳态周而复始的转换,形成周期性振荡,在门G3的输出端Uo得到的就是矩形脉冲波形输出。
图7-1-ll(a)中各关键点的波形如图7-l-ll(b)所示。
振荡器的暂态时间和周期的近似计算公式为:
tw1≈0.98(R//R1)·C
tw2≈1.26R·C
T=tw1十tw2=0.98(R//R1)C十1.26RC
式中,RC是外接的,Rl是TTL与非门中的Rl,当Rl》R时,振荡周期为:
T=2.2RC
多谐振荡器不仅可以用门电路构成,也可以用集成施密特和单稳态触发器构成。
对频率稳定度要求较高的场合,通常采用频率稳定度很高的石英晶体振荡器。
 升级会员
升级会员 