1阅 坐标变换原理很有用.docx
《1阅 坐标变换原理很有用.docx》由会员分享,可在线阅读,更多相关《1阅 坐标变换原理很有用.docx(12页珍藏版)》请在冰豆网上搜索。
1阅坐标变换原理很有用
坐标变换原理
叫我电气小混混 · 3年前
坐标变换是指采用一定的数学方法将一种坐标系的坐标变换为另一种坐标系的坐标的过程「坐标变换_XX百科 」。
对于很多电气领域的朋友来说,这是一个比较简单的问题,且Simulink/SimPowerSystem里有现成的坐标变换模块,此处赘述,只是给出自己当时学习「坐标变换」时的一点心得。
1.坐标变换的性质及约束条件
坐标变换是一种线性变换,如无约束,变换就不是唯一的。
在电机的系统分析中,所应用的坐标变换可有两种约束:
(1)功率不变约束,即变换前后功率保持不变;
(2)合成磁动势不变约束,即变换前后合成磁动势保持不变。
1.1功率不变约束
设在某坐标系统中各绕组的电压和电流向量分别为
在新的坐标系统中电压和电流向量变为
新向量与原向量的坐标变换关系为:
由于变换前后功率不变,则
从而
其中E为单位矩阵。
上式就是功率不变约束下坐标变换阵需要满足的关系式。
在一般情况下,电压变换阵与电流变换阵可以取为同一矩阵,即令
则有
由此可知,在功率不变约束下,当电压向量和电流向量选取相同的变换阵时,变换阵的转置与其逆矩阵相等,这样的坐标变换属于正交变换。
1.2合成磁动势不变约束
至于合成磁动势不变约束,因为绕组电流与磁动势成正比,只要把电流的合成向量分别在新坐标系和原坐标系进行投影,就可以确定新向量与原向量之间的坐标变换关系。
2.三相-两相变换(3/2变换)
三相-两相变换即指在三相静止坐标系A-B-C和两相静止坐标系alpha-beta之间的变换,简称3/2变换或Clarke变换。
2.1Clarke变换矩阵
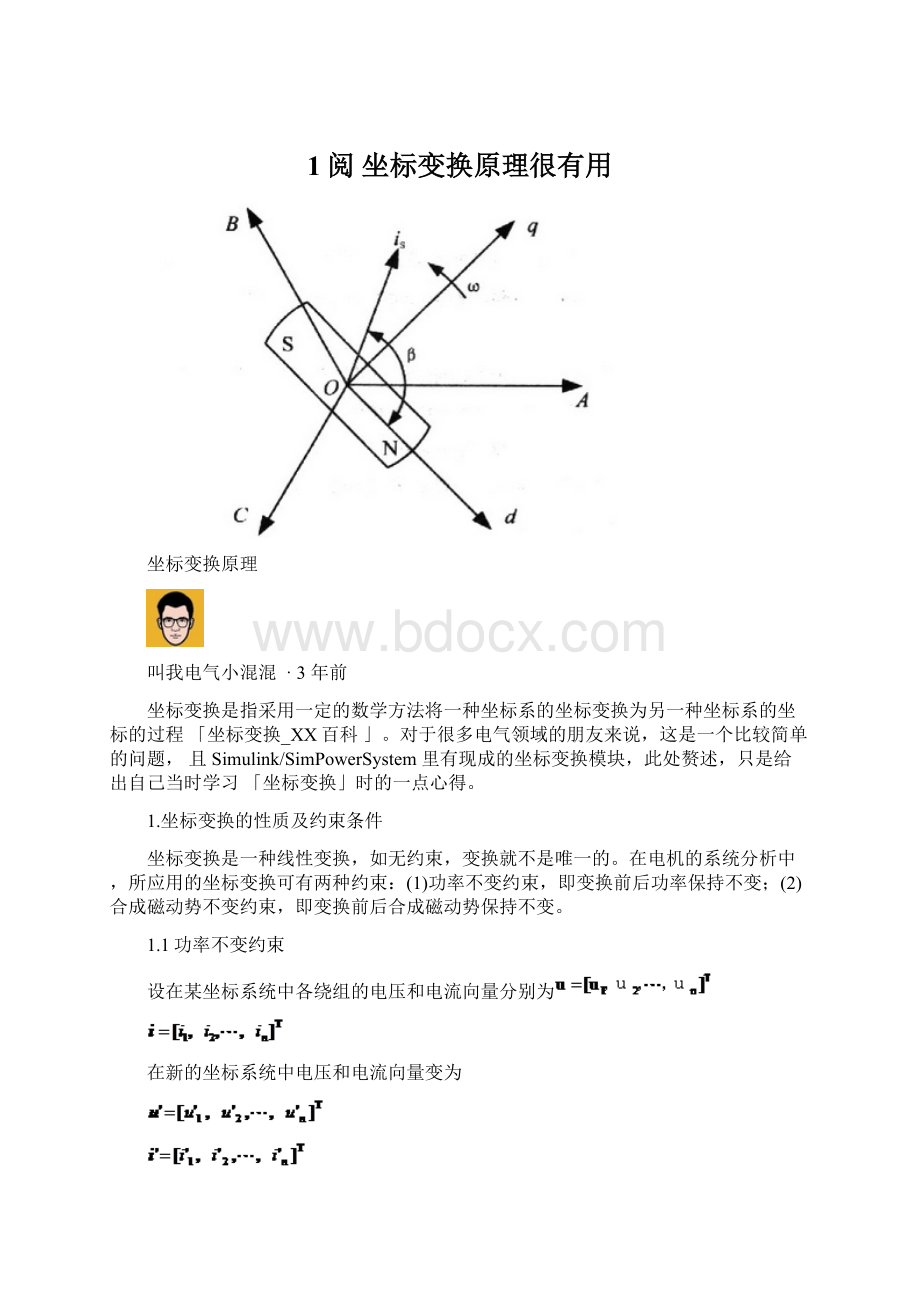
图1给出了A-B-C坐标系和alpha-beta坐标系,为方便起见,取A轴和alpha轴重合。
设三相绕组每相有效匝数为N3,两相绕组每相有效匝数为N2,各相磁动势为有效匝数与电流的乘积,其空间矢量均位于有关相的坐标轴上。
由于交流磁动势的大小随时间在变化着,图中磁动势矢量的长度是随意的。
图1三相和两相坐标系与绕组磁动势的空间矢量
设磁动势波形是正弦分布的,当三相总磁动势与二相总磁动势相等时,两套绕组瞬时磁动势在alpha、beta轴上的投影都应相等,即
写成矩阵形式,得
考虑变换前后总功率不变,在此前提下,匝数比应为
从而,
令C3/2表示从三相静止坐标系A-B-C到两相静止坐标系alpha-beta的变换矩阵,则
令C2/3表示从两相静止坐标系alpha-beta到三相静止坐标系A-B-C的变换矩阵,则
按照所采用的条件,电流变换阵也就是电压变换阵,同时还可证明,它们也是磁链的变换阵。
2.2Clarke变换的MATLAB实现
在MATLAB/SIMULINK环境下,建立Clarke变换模块,并封装为一个子系统,如图
(2)所示。
图2Clarke变换模块(a)封装示意图;(b)内部示意图
图
(2)中的“alphaFun”和“BetaFun”均为SIMULINK/USER-DEFINEDFUNCTIONS中的Fcn模块,可设定较为复杂的函数表达式。
两个函数的设置如图(3)所示,可实现C3/2所描述的Clarke变换。
图3函数设置示意图(a)alphaFun模块设置;(b)BetaFun模块设置
而C2/3表示的逆变换可按照类似的过程生成。
利用这两个模块建立如图(4)所示的仿真模型,进行Clarke变换的验证。
图4Clarke变换仿真模型
其中的三个正弦信号分别为
表示A-B-C坐标系下的分量,频率为50Hz。
经Clarke变换后所得变量,再经逆变换后又可得到原来的三相正弦信号,图(5)为仿真结果。
图5Clarke变换仿真图(a)原信号;(b)Clarke变换后信号;(c)Clarke逆变换后信号;(d)误差信号
3.两相-两相变换(2s/2r变换)
两相-两相变换即指在两相静止坐标系alpha-beta和两相旋转坐标系d-q之间的变换,简称2s/2r变换或Park变换。
3.1Park变换矩阵
图(6)给出了两相静止坐标系alpha-beta和两相旋转坐标系d-q。
图中,两相交流电流i_alpha、i_beta和两相直流电流i_d、i_q产生同样的以同步转速W1旋转的合成磁动势Fs。
由于各绕组匝数都相等,可以消去磁动势中的匝数,直接用电流表示。
但必须注意,这里的电流都是空间矢量,而不是时间相量。
图6两相和两相坐标系与绕组磁动势的空间矢量
d,q轴和矢量Fs都以转速W1旋转,分量i_d、i_q的长短不变,相当于d-q绕组的直流磁动势。
但alpha,beta轴是静止的,alpha轴与d轴的夹角随时间变化,因此i_s在alpha,beta轴上分量也是随时间变化的,相当于绕组交流磁动势的瞬时值。
由此可知,
则两相静止坐标系变换到两相旋转坐标系的变换阵是:
两相旋转坐标系变换到两相静止坐标系的变换阵是:
电压和磁链的旋转变换阵也与电流(磁动势)旋转变换阵相同。
3.2Park变换的MATLAB实现
在MATLAB/SIMULINK环境下,建立Park变换模块,并封装为一个子系统,如图(7)所示。
图7Park变换模块(a)封装示意图;(b)内部示意图
图8函数设置示意图(a)dFun模块设置;(b)qFun模块设置
而式C2r/2s表示的逆变换可按照类似的过程生成。
利用这两个模块建立如图(9)所示的
仿真模型,进行Park变换的验证。
图9Park变换仿真模型
把图(9)中经Clarke变换后得到的两相静止坐标系下的分量输入到Park变换模块,并令d轴与A、B、C三相分量合成的空间矢量重合,即Park变换模块输入的角度为wt,则可得Pake变换后的分量,再经Park逆变换又可得到原来经Clarke变换后得到的分量。
图(10)为仿真结果。
图10Park变换仿真图
(a)原信号;(b)Clarke变换后信号;(c)Park变换后信号;(d)Park逆变换后信号
4.三相-两相变换(3s/2r变换)
三相-两相变换即指在三相静止坐标系A-B-C和两相旋转坐标系d-q之间的变换,简称3s/2r变换。
4.13s/2r变换矩阵
图(11)给出了三相静止坐标系A-B-C和两相旋转坐标系d-q坐标系。
图11三相静止坐标系A-B-C和两相旋转坐标系d-q
从三相静止坐标系A-B-C到两相旋转坐标系d-q的变换式为:
其反变换式为:
4.23s/2r变换的MATLAB实现
在MATLAB/SIMULINK环境下,建立3s/2r变换模块,并封装为一个子系统,如图(12)所示。
图113s/2r变换模块(a)封装示意图;(b)内部示意图
图12函数设置示意图(a)dFun模块设置;(b)qFun模块设置
而式C2r/3s表示的逆变换可按照类似的过程生成。
利用这两个模块建立如图(13)所示的仿真模型,进行3s/2r变换的验证。
图(13)3s/2r变换仿真模型
仿真结果如图(14)所示。
图(14)3s/2r变换仿真图
原信号;(b)3s/2r变换后信号;(c)3s/2r逆变换后信号;(d)误差信号
 升级会员
升级会员 