气液联动执行机构操作维护.docx
《气液联动执行机构操作维护.docx》由会员分享,可在线阅读,更多相关《气液联动执行机构操作维护.docx(19页珍藏版)》请在冰豆网上搜索。
气液联动执行机构操作维护
气液联动执行机构(SHAFER)操作维护手册
1设备简介
SHAFER阀操作系统的基本功能是爆管紧急切断和人为的开/关阀,其中人为的开关阀操作分为远程操作、就地手泵操作和就地自动操作三种方式。
SHAFER阀操作系统在安装调试测试正常后,一般不需要修改系统参数或调整阀位操作。
需要时须由专业技术人员通过便携PC机进行有关参数重新设定或修改。
1.1SHAFER气液联动执行机构结构与控制原理
1.1.1结构
SHAFER气液联动执行机构包括三大部分,分别是:
控制器、驱动器、液压操作系统。
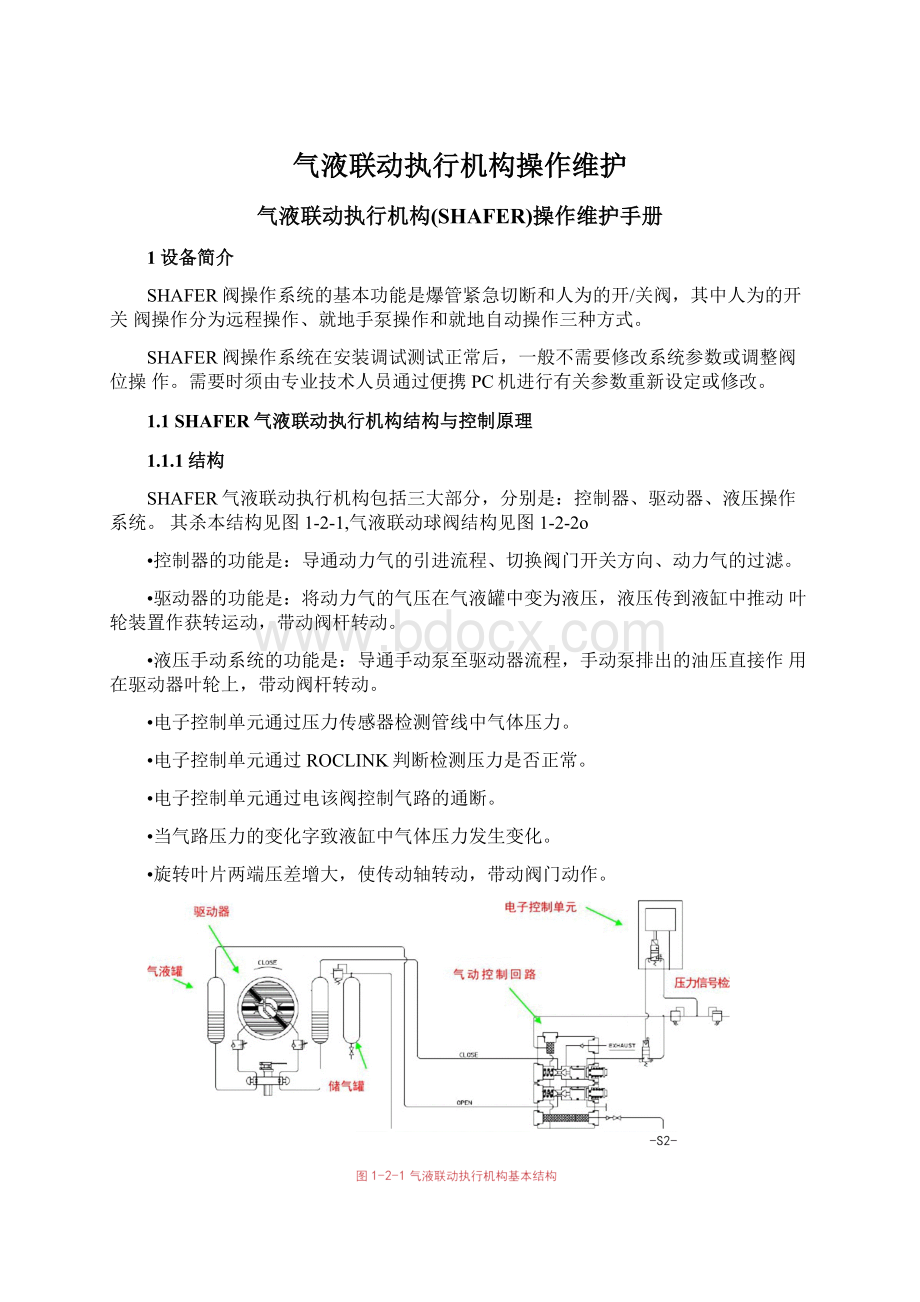
其杀本结构见图1-2-1,气液联动球阀结构见图1-2-2o
•控制器的功能是:
导通动力气的引进流程、切换阀门开关方向、动力气的过滤。
•驱动器的功能是:
将动力气的气压在气液罐中变为液压,液压传到液缸中推动叶轮装置作获转运动,带动阀杆转动。
•液压手动系统的功能是:
导通手动泵至驱动器流程,手动泵排出的油压直接作用在驱动器叶轮上,带动阀杆转动。
•电子控制单元通过压力传感器检测管线中气体压力。
•电子控制单元通过ROCLINK判断检测压力是否正常。
•电子控制单元通过电该阀控制气路的通断。
•当气路压力的变化字致液缸中气体压力发生变化。
•旋转叶片两端压差增大,使传动轴转动,带动阀门动作。
01-2-2气液联动球阀结构图
1.1.2控制原理
川气东送天然气管道工程支线气液联动执行机构共分四种类型,分别为:
•手动阀室所使用的气液联动执行机构
•过站干线所使用的气液联动执行机构
•站场进出站紧急关斷阀ESDV所使用的气液联动执行机构
•站场紧急泄放阀BDV所使用的气液联动执行机构
1.1.2.1线路截断阀气液联动执行机构
手动阀室所使用的气液联动执行机构,其控制原理图见图1-2-3o此气液联动执行机构具有就地控制,电子控制单元检测管线压力,自动关阀等功能。
本控制原理图是应用气/液联动系统操作阀门的旋转叶片执行器的原理图,动力气体是天然气。
在整个回路中包括阀门执行器
(1)、一套气/液联动罐
(2)和(3)、手动液压泵(4)、开关一个冲程的储气罐(6)、“梭阀”控制模块(门)、两通路通常关闭的先导阀(18)、压力调节器(19)、安全放空阀(21)、一组电子式爆管保护控制系统(20)、太阳能板(22)O
a)电子式爆管保护功能(关阀)
在电子控制单元(20)中,带有压力传感器,通过管路与天然气主管线连接以获得压力信号。
当管线中的实际压力数据达到并超过电子控制单元中设定的三种压力参数中的任何一种时(高压关阀,低压开阀,压降速率关阀),并且此事件持续时间达到电子控制单元中设定的延时时间后,电子控制单元中的正常处于关闭状态的三通路电磁阀通电,并使气流流向正常处于关闭状态的二通路先导阀(18)。
由于“梭阀”模块(11,14,16)的信号与动力的比是33比1,这样二通路先导阀(18)打开'‘梭阀”打开,容许动力气体从动力接口到气缸中活寒接口(14),动力“梭子”(16)被打开,容许动力气流进入原来被气缸封闭住的空间,从而进入执行器关闭阀门的气/液联动罐(3),气流将进一步通过手动泵(4)和速度调节装置(5),从而进入隸转叶片执行器的本体,执行器在这个动力驰使下,运动直至关闭阀门。
当电子控制单元(20)中预先设定的电该阀“待命”时间(10-255秒)完成时,此时电磁阀斷电,信号气从通常关闭的二通路先导阀(18)排出。
当先导阀关闭时,引字气从“梭阀“模块(14)的孔板处排出,位于“梭阀”模块中负责关闭阀门功能的那一侧梭子关闭,致使负责关闭阀门的气/液联动罐(3)压力降低减压。
当气/液联动罐(3)压力降低全部完成,整个气/液联动系统重新回到初始的平衡状态。
b)就地手动操作开或关阀门和执行器
开阀:
拉开“梭阀”模块(11)上的开阀手柄(15),此机械式的手柄直接将力作用在动力梭阀(16)上,使其动作打开原来被“梭阀”(16)和动力气缸活寒(14)封锁住的密闭空间,使得动力气体进入到负责开阀功能的气/液联动罐
(2),动力气驰动液压油使获转叶片执行器动作。
持续地拉住手柄(15)直到执行器
(1)驱动阀门达到全开的位置。
当阀门与执行器全部动作完成后,松开手柄(15),“梭阀”模块(门)将恢复到初始全封闭的位置,全部系统达到新的平衡状态。
关阀:
拉开“梭阀”模块(11)上的关阀手柄(15),手柄直接将力作用在动力梭阀(16)上,使其动作打开原来被"梭阀”(16)和动力气缸活塞(14)封锁住的密闭空间,使得动力气体进入到负责关阀功能的气/液联动罐(3),动力气驱动液压油使璇转叶片执行器动作。
持续地拉住手柄(15)直到执行器
(1)驱动阀门达到全关的位置。
当阀门与执行器全部动作完成后,松开手柄(15)“梭阀”模块(门)将恢复到初始全封闭的位置,系统达到新的平衡状态。
c)就地手动泵开/关阀门和执行器
无论想开或关阀,最简单的就是用一个手柄装在执行器控制箱的手动泵(4)的接口上,使用这个手柄上下压动,将力推向泵的中部。
(注:
泵的标记将指明开或关阀的动作方向。
)
使用供货时提供的手动泵手柄,向上抬举这个手柄时,手动泵的插销提超,使得液压油进入手动泵,再向下推压手柄,给液压油加压,使得液压油进入执行器。
重复上抬、下压手柄的动作,直至开或关阀的过程全部完成。
泵被泄压并回到初始状态,此时任何自动控制这个执行器的功能可以被使用。
1.1.2.2越站干线使用的气液联动执行机构
过站干线所使用的气液联动执行机构,其控制原理图见图1-2-4o此气液联动执行机构具有就地控制,远程开关控制,ESD紧急关断控制,电子控制单元检测管线压力,自动关阀控制,ESD及电子控制单元关阀后的手动复位控制等功能,另外本控制原理图1-2-4也能够保证电子控制单元关阀及ESD关阀具有最高的优先级。
图1-2-4控制原理图
本控制原理图是应用气/液联动系统操作阀门的获转叶片执行器的原理图,动力气体是天然气。
在整个回路中包括阀门执行器
(1)、一套气/液联动罐
(2)和(3)、手动液压泵(4)、开关一个冲程的储气罐(6)、“梭阀”控制模块(11)、两通路通常关闭的先导阀(18)、压力调节器(19)、安全放空阀(21)、一组电子式爆管保护控制系统(20)、三通路通常开启的先导阀(22)和一个三通路通常关闭的先导阀带有锁定功能(23)等31项容,具体见图1-2-4o
本流程图具有如下操作功能:
a)电子式爆管保护功能(关阀)
在电子控制单元(20)中,带有压力传感器,通过管路与天然气主管线连接以获得压力信号。
当管线中的实际压力数据达到并超过电子控制单元中设定的三种压力参数中的任何一种时(高压关阀,低压关阀,压降速率关阀),并且此事件持续时间达到电子控制单元中设定的延时时间后,电子控制单元中的正常处于关闭状态的电磁阀通电,并使气流流向正常处于关闭状态的先导阀08)。
由于''梭阀”模块(11,14,16)的信号与动力的比是33比1,这样先导阀(18)打开后,“梭阀”打开,容许动力气体从动力接口到气缸中活寒接口(14),动力"梭子”(16)被打开,容许动力气流进入原来被气缸封闭住的空间,从而进入执行器关闭阀门的气/液联动罐(3),气流将进一步通过手动泵(4)和速度调节装置(5),从而进入璇转叶片执行器的本体,执行器在这个动力驰使下,运动直至关闭阀门。
当电子控制单元(20)中预先设定的电磁阀“待命”时间(10-255秒)完成吋,此时电礁阀断电。
当先导阀关闭时,引导气从"梭阀“模块(14)的孔板处排出,位于“梭阀”模块中负责关闭阀门功能的那一侧梭子关闭,致使负责关闭阀门的气/液联动耀(3)压力降低减压。
当气/液联动罐
(3)压力降低全部完成,整个气/液联动系统重新回到初始的平衡状态。
b)锁定功能(防止开阀)
当上述的的电子式爆管保护系统工作的时候,气流同时通过带有锁定功能的先导阀(23)o此先导打开使得正常情况开启的先导阀(22)关闭,当有爆管关阀命令执行后,璇转叶片执行器将使阀门继续处于关闭的状态和位置。
这个具有锁定功能的正常关闭的先导阀(23)连续不断地提供了恒定的信号压力给另一个正常开启的先导阀(22),从而防止了通过这个控制回路去驱动旋转叶片执行器动作进而打开阀门。
这个锁定功能的解锁,只有通过人工进行手动复位操作,使正常开启的先导阀(22)泄放压力直至重新恢复正常开启的状态。
c)二通路电遥控(开或关阀)
开阀:
当阀门处于关闭状态的位置,给正常关闭状态的电械阀(28)带电,该阀打开,
动力乞体通过动力接口进入“梭阀”模块(11)号气缸的活寒(14)。
“梭阀”(16)
打开,动力气进入原来被“梭阀”和气缸封锁住的空间,同时进入负责开阀功能的气/液联动罐
(2),动力气体驱动液压油经过手动泵(4)和速度调节孔板(5),进入了旋转叶片执行器
(1),直至执行器驰动阀门到全开的位置。
当阀门全开后,正常关闭的电磁阀(28)在执行器完成全部动作E断电,系统重新回到平衡的位置。
关阀:
当阀门处于开启状态的位置,给正常关闭状态的电砂阀(27)带电,该阀打开,动力气体通过动力接口到它的气缸接口,经过梭阀(26)作用到梭阀模块(11)中的信号活寒(14),动力气进入到原来被"梭阀”(16)和气缸封锁住的空间,进入到负责关阀功能的气/液联动罐(3)o动力气体驱动液压油经过手动泵(4),速度调节孔板
(5)进入了璇转叶片执行器,直至执行器驰动阀门到全关位置。
当阀门全关后,负责关闭功能的正常关闭的电磁阀(27),在执行器完成全部动作后斷电。
系统重新回到平衡的位置。
d)就地手动操作开或关阀门和执行器
开阀:
拉开“梭阀”模块(11)上的开阀手柄(15),此机械式的手柄直接将力作用在动力梭阀(16)上,使其动作打开原来被“梭阀”(16)和动力气缸活寒(14)封锁住的密闭空间,使得动力气体进入到负责开阀功能的气/液联动罐
(2),动力气驰动液压油使璇转叶片执行器动作。
持续地拉住手柄(15)直到执行器
(1)驱动阀门达到全开的位置。
当阀门与执行器全部动作完成后,松开手柄(15),“梭阀”模块(剑)将恢复到初始全封闭的位置,全部系统达到新的平衡状态。
关阀:
拉开“梭阀”模块(剑)上的关阀手柄(15),手柄直接将力作用在动力梭阀(16)上,使其动作打开原来被"梭阀”(16)和动力气缸活寒(14)封锁住的密闭空间,使得动力气体进入到负责关阀功能的气/液联动罐(3),动力气驱动液压油使旋转叶片执行器动作。
持续地拉住手柄(15)直到执行器
(1)驰动阀门达到全关的位置。
当阀门与执行器全部动作完成后,松开手柄(15)“梭阀”模块(门)将恢复到初始全封闭的位置,系统达到新的平衡状态。
e)就地手动泵开/关阀门和执行器
无论想开或关阀,最简单的就是用一个手柄装在执行器控制箱的手动泵(4)的接口上,使用这个手柄上下压动,将力推向泵的中部。
(注:
泵的标记将指明开或关阀的动作方向。
)
使用供货时提供的手动泵手柄,向上抬举这个手柄时,手动泵的插销提起,使得液压油进入手动泵,再向下推压手柄,给液压油加压,使得液压油进入执行器。
重复上抬、下压手柄的动作,直至开或关阀的过程全部完成。
泵被泄压并回到初始状态,
此时任何自动控制这个执行器的功能可以被使用。
f)站控系统ESD控制(站控系统对气液联动系统常供电,断电关阀)
正常情况下,站控系统给常开电触阀(30)常带电,一旦站控系统断掉此电磁阀的电源,先导阀(18)导通动力气,驰动阀门关闭,另外,ESD关阀同时,会触发先导阀(22)切斷开阀控制气路,保证在接到ESD关阀命令的同时,即使接到开阀命令也不会执行开阀操作,保证ESD关阀操作具有最高优先级。
1.1.2.3站场进出站使用的气液联动执行机构
站场进出站紧急关斷阀ESDV所使用的气液联动执行机构,其控制原理图见图1-2-5o此气液联动执行机构具有就地控制,远程开关控制,ESD紧急关斷控制及ESD关阀后的手动复位等功能,另外本控制原理图1-2-5也能够保证ESD关阀具有最高的优先级。
图1-2-5控制原理图
(1)执行器
(7)排液阀
(13)先导过滤器
(2)气/液联动耀
(8)排气阀
(14)活寒
(3)气/液联动耀
(9)单向阀
(15)手柄
(4)手动液压泵
(10)压力表
(16)梭阀
(5)速度调节孔板
(11)梭阀模块
(17)电饌阀
(6)储气罐
(12)过滤器
(18)电礁阀
本控制原理图是应用气/液联动系统操作阀门的旋转叶片执行器的原理图,动力气体是天然气。
在整个回路中包括阀门执行器
(1)、一套气/液联动罐
(2)和(3)、手动液压泵(4)、开关一个冲程的储气罐(6)、“梭阀”控制模块(门)、压力调节器
(24)、安全放空阀(25)、先导阀(2刀和常闭带有锁定功能的电濮阀(20)等27项容,具体见图3-5。
本控制原理图具有如下操作模式:
a)锁定功能(防止误操作)
通常情况下电磁阀(20)导通,使控制气路到达先导阀(27)的上端,从而先导阀(27)字通,一旦电触阀斷电,控制气被泄放掉,开气路被切斷,同时,(20)被锁定,阀门关闭,需要给(20)复位,才能重新打开阀门。
b)二通路电遥控(开或关阀)
开阀:
当阀门处于关闭状态的位置,给常闭状态的电磁阀(18)带电,该阀打开,动力气体通过动力接口进入''梭阀”模块(门)号气缸的活寒(14)。
“梭阀”(16)打开,动力气进入原来被“梭阀”和气缸封锁住的空间,同时进入负责开阀功能的气/液联动罐
(2),动力气体驱动液压油经过手动泵(4)和速度调节孔板(5),进入了旋转叶片执行器
(1),直至执行器驰动阀门到全开的位置。
当阀门全开后,正常关闭的电该阀(18)在执行器完成全部动作后断电,系统重新回到平衡的位置。
关阀:
当阀门处于开启状态的位置,给常闭状态的电磁阀(1刀带电,该阀打开,动力气体通过动力接口到它的气缸接口,经过梭阀(26)作用到梭阀模块(门)中的信号活寒(14),动力气进入到原来被"梭阀”(16)和气缸封锁住的空间,进入到负责关阀功能的气/液联动罐(3)o动力气体驱动液压油经过手动泵(4),速度调节孔板(5)进入了旋转叶片执行器,直至执行器驱动阀门到全关位置。
当阀门全关后,负责关闭功能的正常关闭的电磁阀(17),在执行器完成全部动作后斷电。
系统重新回到平衡的位置。
c)就地手动操作开或关阀门和执行器
开阀:
拉开“梭阀”模块(11)上的开阀手柄(15),此机械式的手柄直接将力作用在动力梭阀(16)上,使其动作打开原来被"梭阀”(16)和动力气缸活寒(14)封锁住的密闭空间,使得动力气体进入到负责开阀功能的气/液联动罐
(2),动力气驰动液压油使获转叶片执行器动作。
持续地拉住手柄(15)直到执行器
(1)驱动阀门达到全开的位置。
当阀门与执行器全部动作完成后,松开手柄(15),“梭阀”模块(门)将恢复到初始全封闭的位置,全部系统达到新的平衡状态。
关阀:
拉开“梭阀”模块(11)X的关阀手柄(15),手柄直接将力作用在动力梭阀(16)上,使其动作打开原来被"梭阀”(16)和动力气缸活寒(14)封锁住的密闭空间,使得动力气体进入到负责关阀功能的气/液联动罐(3),动力气驱动液压油使旋转叶片执行器动作。
持续地拉住手柄(15)直到执行器
(1)驱动阀门达到全关的位置。
当阀门与执行器全部动作完成松开手柄(15)“梭阀”模块(11)将恢复到初始全封闭的位置,系统达到新的平衡状态。
d)就地手动泵开/关阀门和执行器
无论想开或关阀,最简单的就是用一个手柄装在执行器控制箱的手动泵(4)的接口上,使用这个手柄上下压动,将力推向泵的中部。
(注:
泵的标记将指明开或关阀的动作方向。
)
使用供货时提供的手动泵手柄,向上抬举这个手柄时,手动泵的插销提超,使得液压油进入手动泵,再向下推压手柄,给液压油加压,使得液压油进入执行器。
重复上抬、下压手柄的动作,直至开或关阀的过程全部完成。
泵被泄压并回到初始状态,此时任何自动控制这个执行器的功能可以被使用。
e)站控系统ESD紧急关阀控制(站控系统对ESD电磁阀常供电,断电关阀)
正常情况下,站控系统给常开电触阀(20)常带电,一旦站控系统断掉此电磁阀的电源,动力气将通过限位阀(21),驱动阀门关闭,另外,ESD关阀同吋,会触发先字阀(27)切断开阀控制气路,保证在接到ESD关阀命令的同时,即使接到开阀命令也不会执行开阀操作,保证ESD关阀操作具有最高优先级。
1.1.2.4紧急泄放阀气液联动执行机构
站场紧急泄放阀BDV所使用的气液联动执行机构,其控制原理图见图1-2-6o此气液联动执行机构具有就地控制,远程开关控制,紧急开(放空)控制,紧急放空后的手动复位控制等功能,另外本控制原理图3-6也能够保证紧急放空具有最高的优先级。
(1)执行器
(2)气/液联动耀
(3)
气/液联动罐
(4)手动液压泵
(5)速度调节孔板
(6)储气耀
(7)排液阀
(8)排气阀
(9)单向阀
(10)压力表
(11)梭阀模块
(12)过滤器
(13)先字过滤器
(14)活寒
(15)手柄
(16)梭阀
(17)电磁阀
(18)电磁阀
(19)截断阀
(20)带有锁定功能的常关电
磁阀
(21)限位阀
(22)就地操作装置
(23)叶片
(24)压力调节器
(25)
图1-2-6控制原理图
(26)梭阀
(27)先导阀
安全放空阀
本控制原理图是应用气/液联动系统操作阀门的旋转叶片执行器的原理图,动力气体是天然气。
在整个回路中包括阀门执行器
(1)、一套气/液联动罐
(2)和(3)、手动液压泵(4)、开关一个冲程的储气罐(6)、“梭阀”控制模块(11)、压力调节器(24)、安全放空阀(25)、常开的先导阀(2刀和一个带有锁定功能的常关电牍阀(20)等27项容,具体容见控制原理图1-2-6o
本流程图具有如下操作模式:
◊锁定功能(需现场手动复位后才能重新关阀)
◊远程遥控功能(开/关阀)
◊就地气动手柄操作(开/关阀)
◊就地手动泵操作(开/关阀)
◊站控系统紧急开(放空)控制(站控系统对用于紧急放空的电礁阀常供电,斷电开阀放空)
a)锁定功能(防止误操作)
通常情况下电磁阀(20)导通,使控制气路到达先导阀(27)的上端,从而先导阀(27)导通,一旦电磁阀斷电,控制气被泄放掉,关气路被切斷,同时,(20)被锁定,如需再次关闭阀门,需要给(20)复位,才能重新关阀。
b)二通路电遥控(开致关阀)
-开阀:
当阀门处于关闭状态的位置,给正常关闭状态的电磁阀(18)带电,该阀打开,动力气体通过动力接口进入"梭阀”模块(11)号气缸的活寒(14)。
'‘梭阀”(16)打开,动力气进入原来被“梭阀”和气缸封锁住的空间,同时进入负责开阀功能的乞/液联动罐
(2),动力气体驱动液压油经过手动泵(4)和速度调节孔板(5),进入了旋转叶片执行器
(1),直至执行器驱动阀门到全开的位置。
当阀门全开后,二通路正常关闭的电磁阀(18)在执行器完成全部动作后断电,系统重新回到平衡的位置。
-关阀:
当阀门处于开启状态的位置,给正常关闭状态的电磁阀(17)带电,该阀打开,动力气体通过动力接口到它的气缸接口,经过梭阀(26)作用到梭阀模块(“)中的信号活寒(14),动力气进入到原来被“梭阀”(16)和气缸封锁住的空间,进入到负责关阀功能的气/液联动罐(3)o动力气体驱动液压油经过手动泵(4),速度调节孔板(5)进入了旋转叶片执行器,直至执行器驰动阀门到全关位置。
当阀门全关后,负责关闭功能的二通路正常关闭的电磁阀(17),在执行器完成全部动作E断电。
系统重新回到平衡的位置。
c)就地手动操作开或关阀门和执行器
开阀:
拉开“梭阀”模块(11)上的开阀手柄(15),此机械式的手柄直接将力作用在动力梭阀(16)上,使其动作打开原来被“梭阀”(16)和动力气缸活寒(14)封锁住的密闭空间,使得动力气体进入到负责开阀功能的气/液联动罐
(2),动力气驱动液压油使旋转叶片执行器动作。
持续地拉住手柄(15)直到执行器
(1)驱动阀门达到全开的位置。
当阀门与执行器全部动作完成后,松开手柄(15),"梭阀”模块(门)将恢复到初始全封闭的位置,全部系统达到新的平衡状态。
关阀:
拉开“梭阀”模块(11)上的关阀手柄(15),手柄直接将力作用在动力梭阀(16)上,使其动作打开原来被"梭阀”(16)和动力气缸活寒(14)封锁住的密闭空间,使得动力气体进入到负责关阀功能的气/液联动罐(3),动力气驱动液压油使旋转叶片执行器动作。
持续地拉住手柄(15)直到执行器
(1)驱动阀门达到全关的位置。
当阀门与执行器全部动作完成后,松开手柄(15)"梭阀”模块(11)将恢复到初始全封闭的位置,系统达到新的平衡状态。
d)就地手动泵开/关阀门和执行器
无论想开或关阀,最简单的就是用一个手柄装在执行器控制箱的手动泵(4)的接口上,使用这个手柄上下压动,将力推向泵的中部。
(注:
泵的标记将指明开或关阀的动作方向。
)
使用供货时提供的手动泵手柄,向上抬举这个手柄时,手动泵的插销提起,使得液压油进入手动泵,再向下推压手柄,给液压油如压,使得液压油进入执行器。
重复上抬、下压手柄的动作,直至开或关阀的过程全部完成。
泵被泄压并回到初始状态,此时任何自动控制这个执行器的功能可以被使用。
e)站控系统紧急开阀(放空)控制(站控系统对用于紧急放空的电牍阀常供电,断电开阀)
正常情况下,站控系统给常开电磁阀(20)常带电,一旦站控系统斷掉此电磁阀的电源,动力气将通过限位阀(21),驱动阀门打开,另外,开阀同时,会触发先导阀(27)切斷关阀控制气路,保证在接到紧急开阀命令的同时,即
使接到关阀命令也不会执行关阀操作,保证紧急放空操作具有最高优先级。
检修、测试、维护、保养
3.1检修与维护
3.1.1执行器排空
在正常情况下,旋转叶片执行器腔体不应有气体存在。
有气体存在时,执行器动作迟缓或运行不稳定。
此时就应对执行器进行排空。
操作步骤如下:
1)将执行器上盖的任意两个对顶清污寒卸下,手泵选择器旋至被卸去清污寒所在腔注油的位置;
2)用手泵打油,当从一个孔中流出纯液压油时,将卸下的这个孔的清污寒装上拧紧,继续用手泵打油,当这个对顶扇形腔中所有的气体和泡沬全部排除时,装上并拧紧第二个清污寒;
3)将另外对顶扇形腔所在的两个清污寒卸下,手泵选择器旋至该扇形腔注油的位置;
4)用手泵打油,当从一个孔中流出纯液压油时,将卸下的这个孔的清污寒装上拧紧,继续用手泵打油,当这个对顶扇形腔中所有的气体和泡沬全部排除时,装上并拧紧第二个清污寒。
5)在完成排空操作应重新恢复气液罐中的油位,油位正确后方可进行正常的操作。
3.1.2执行器排污
执行器应定期排污,以除去沉积的天然气凝液、水、残渣和磨损的铁屑。
排污频率取决天然气组分和气候条件,通常在冬季来临前应进行排污。
排污时卸下执行器底部的四个排污寒,凝液和污物就会排出。
排完积液应按本手册3.1.1执行器排空的方法重新建立正确的油位。
3.1.3正确操作油位
由于排污、排空或其它原因造成的泄漏会使油量减少,应及时补充。
一般气液罐中的油量是执行器充满油量的1.5倍,执行器的容积参数印在其规格型号标签上,标签已贴在了执行器醒目的位置。
3.2维
 升级会员
升级会员 