机械原理 第二单元习题答案 中南大学出版.docx
《机械原理 第二单元习题答案 中南大学出版.docx》由会员分享,可在线阅读,更多相关《机械原理 第二单元习题答案 中南大学出版.docx(11页珍藏版)》请在冰豆网上搜索。
机械原理第二单元习题答案中南大学出版
第二章习题及解答
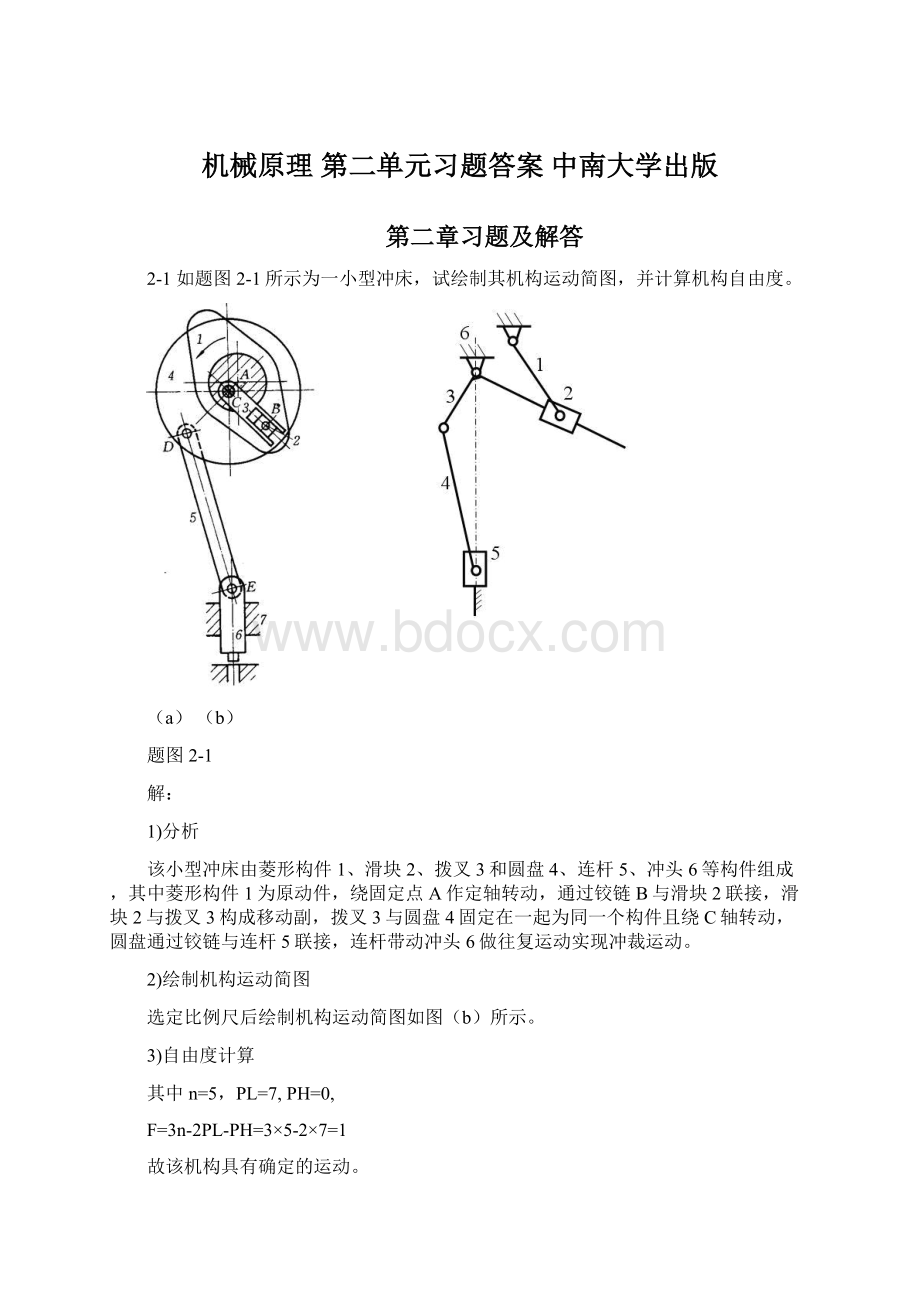
2-1如题图2-1所示为一小型冲床,试绘制其机构运动简图,并计算机构自由度。
(a)(b)
题图2-1
解:
1)分析
该小型冲床由菱形构件1、滑块2、拨叉3和圆盘4、连杆5、冲头6等构件组成,其中菱形构件1为原动件,绕固定点A作定轴转动,通过铰链B与滑块2联接,滑块2与拨叉3构成移动副,拨叉3与圆盘4固定在一起为同一个构件且绕C轴转动,圆盘通过铰链与连杆5联接,连杆带动冲头6做往复运动实现冲裁运动。
2)绘制机构运动简图
选定比例尺后绘制机构运动简图如图(b)所示。
3)自由度计算
其中n=5,PL=7,PH=0,
F=3n-2PL-PH=3×5-2×7=1
故该机构具有确定的运动。
2-2如题图2-2所示为一齿轮齿条式活塞泵,试绘制其机构运动简图,并计算机构自由度。
(a)(b)
题图2-2
解:
1)分析
该活塞泵由飞轮曲柄1、连杆2、扇形齿轮3、齿条活塞4等构件组成,其中飞轮曲柄1为原动件,绕固定点A作定轴转动,通过铰链B与连杆2联接,连杆2通过铰链与扇形齿轮3联接,扇形齿轮3通过高副接触驱动齿条活塞4作往复运动,活塞与机架之间构成移动副。
2)绘制机构运动简图
选定比例尺后绘制机构运动简图如图(b)所示。
3)自由度计算
其中n=4,PL=5,PH=1
F=3n-2PL-PH=3×4-2×5-1=1
故该机构具有确定的运动。
2-3如图2-3所示为一简易冲床的初步设计方案,设计者的意图是电动机通过一级齿轮1和2减速后带动凸轮3旋转,然后通过摆杆4带动冲头实现上下往复冲压运动。
试根据机构自由度分析该方案的合理性,并提出修改后的新方案。
题图2-3
解:
1)分析
2)绘制其机构运动简图(图2-3b)
选定比例尺后绘制机构运动简图如图(b)所示。
3)计算机构自由度并分析其是否能实现设计意图
由图b可知,
故
因此,此简易冲床根本不能运动,需增加机构的自由度。
4)提出两种修改方案
为了使机构能运动,应增加机构的自由度。
方法可以是:
在机构的适当位置,增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c图d给出其中的两种方案。
新方案中:
新方案的机构自由度:
改进后的方案具有确定的运动。
2-4如题图2-4所示为一小型压力机,试绘制其机构运动简图,并计算机构自由度。
(a)(b)
题图2-4
解:
1)分析
该压力机由齿轮1、偏心轮1’、连杆2、导杆3、叉形连杆4、齿轮5、滚子6、滑块7、冲头8所组成,其中齿轮1与偏心轮1’固定连接组成一个构件,且为原动件,偏心轮1’与连杆2通过转动副联接,连杆通过铰链推动导杆移动,导杆的另外一端与连杆4构成转动副,连杆4的中部有一个滚子6,齿轮5的端面加工有一个凹槽,形成一个端面槽形凸轮,滚子6嵌入凸轮槽中,叉形连杆4另外一端与滑块7构成移动副,滑块7通过铰链与冲头联接,驱动冲头滑块作往复上下冲压运动。
2)作机构运动简图
选定比例尺后绘制机构运动简图如图(b)所示。
3)计算该机构的自由度
故该机构具有确定的运动。
2-5如题图2-5所示为一人体义腿膝关节机构,若以胫骨1为机架,试绘制其机构运动简图,并计算机构自由度。
(a)(b)
题图2-5
解:
1)分析
该机构所有构件均为杆状,且都是通过转动副相联接,
2)绘制机构运动简图
选定比例尺后绘制机构运动简图如图(b)所示。
3)计算自由度
故该机构具有确定的运动。
2-6 计算图2-6所示压榨机机的机构自由度。
(a)(b)
题图2-6
解:
该机构中存在结构对称部分,构件4、5、6和构件8、9、10。
如果去掉一个对称部分,机构仍能够正常工作,故可将构件8、9、10上转动副G、H、I、D处带来约束视为虚约束;构件7与构件11在左右两边同时形成导路平行的移动副,只有其中一个起作用,另一个是虚约束;构件4、5、6在E点处形成复合铰链。
机构中没有局部自由度和高副。
去掉机构中的虚约束,则得到图(b)中实线所示的八杆机构,其中活动构件数为
,机构中低副数
,于是求得机构的自由度为:
故该机构具有确定的运动。
2-7计算题图2-7所示测量仪表机构的自由度。
题图2-7
解:
1)分析
该机构包括6个活动构件,其中导杆与扇形齿轮固联在一起组成构件5,齿轮与指针固联在一起组成构件6。
2)计算自由度
活动构件数为
,机构中低副数
,高副数
于是求得机构的自由度为:
故该机构具有确定的运动。
2-8如题图2-8所示为一物料输送机构,试绘制机构运动简图,并计算机构的自由度。
(a)(b)
题图2-8
解
1)分析
该机构中共包含有8个构件,且所有构件均通过转动副联接,其中曲柄为原动件。
2)绘制机构运动简图
选定比例尺后绘制机构运动简图如图2-8(b)所示。
3)计算自由度
活动构件数为
,机构中低副数
,高副数
于是求得机构的自由度为:
故该机构具有确定的运动。
2-9如题图2-8所示为一拟人食指机械手,试绘制该机构的运动简图,并计算机构的自由度。
(a)(b)
题图2-9
解:
1)分析
该机构共有8个构件,其中手掌体为机架,活塞A作直线移动,为原动件,其余运动副均为转动副。
2)绘制运动简图
选定比例尺后绘制机构运动简图如图2-9(b)所示。
3)自由度计算
机构中活动构件数:
故该机构具有确定的运动。
2-9如题图2-9所示为某一机械中制动器的机构运动简图,工作中当活塞杆1被向右拉时,通过各构件传递运动迫使摆杆4、6作相向摆动,制动块压紧制动轮实现制动;当活塞杆1被向左拉时,迫使构件4、6作反相摆动,此时制动块与制动轮脱离接触,不起制动作用。
试分析该机构由不制动状态过渡到制动状态时机构自由度变化情况。
解:
1)分析工作过程
制动过程中闸瓦经历了不接触制动轮,到单边闸瓦接触制动轮,再到两侧闸瓦全部压紧制动轮三种情况。
闸瓦接触到制动轮之后,摆杆停止摆动,此时的摆杆可认为变成了机架的一部分,因此,制动过程中机构的构件数目会发生变化。
1)未刹车时,刹车机构的自由度
2)闸瓦
之一刹紧车轮时,刹车机构的自由度
3)闸瓦
同时刹紧车轮时,刹车机构的自由度
2-10题4-3图为外科手术用剪刀。
其中弹簧的作用是保持剪刀口张开,并且便于医生单手操作。
忽略弹簧,并以构件1为机架,分析机构的工作原理,画出该机构的运动简图。
(a)(b)
题图2-10
解:
1)工作原理分析
若以构件1为机架,则该手术用剪刀由机架1、原动件2、从动件3、4组成,共4个构件。
属于平面四杆机构。
当用手握住剪刀,即构件1(固定钳口)不动时,驱动构件2,使构件2绕构件1转动的同时,通过构件3带动构件4(活动钳口)也沿构件1(固定钳口)上下移动,从而使剪刀的刀口张开或闭合。
2)绘制运动简图
选定比例尺后绘制机构运动简图如图2-10(b)所示。
3)自由度计算
2-11如题图2-11所示为一内燃机简图,试计算该机构的自由度,并确定该机构的级别,若选构件5为原动件,该机构又是几级机构。
(a)(b)(c)
题图2-11
解:
1)计算此机构的自由度
2)取构件
为原动件时,机构的基本杆组图如图b所示,此机构为Ⅱ级机构。
3)取构件
为原动件时,机构的基本杆组图如图c所示,此机构为Ⅲ级机构。
 升级会员
升级会员 