Simulink模型及输入节约信号后系统的响应曲线.docx
《Simulink模型及输入节约信号后系统的响应曲线.docx》由会员分享,可在线阅读,更多相关《Simulink模型及输入节约信号后系统的响应曲线.docx(11页珍藏版)》请在冰豆网上搜索。
Simulink模型及输入节约信号后系统的响应曲线
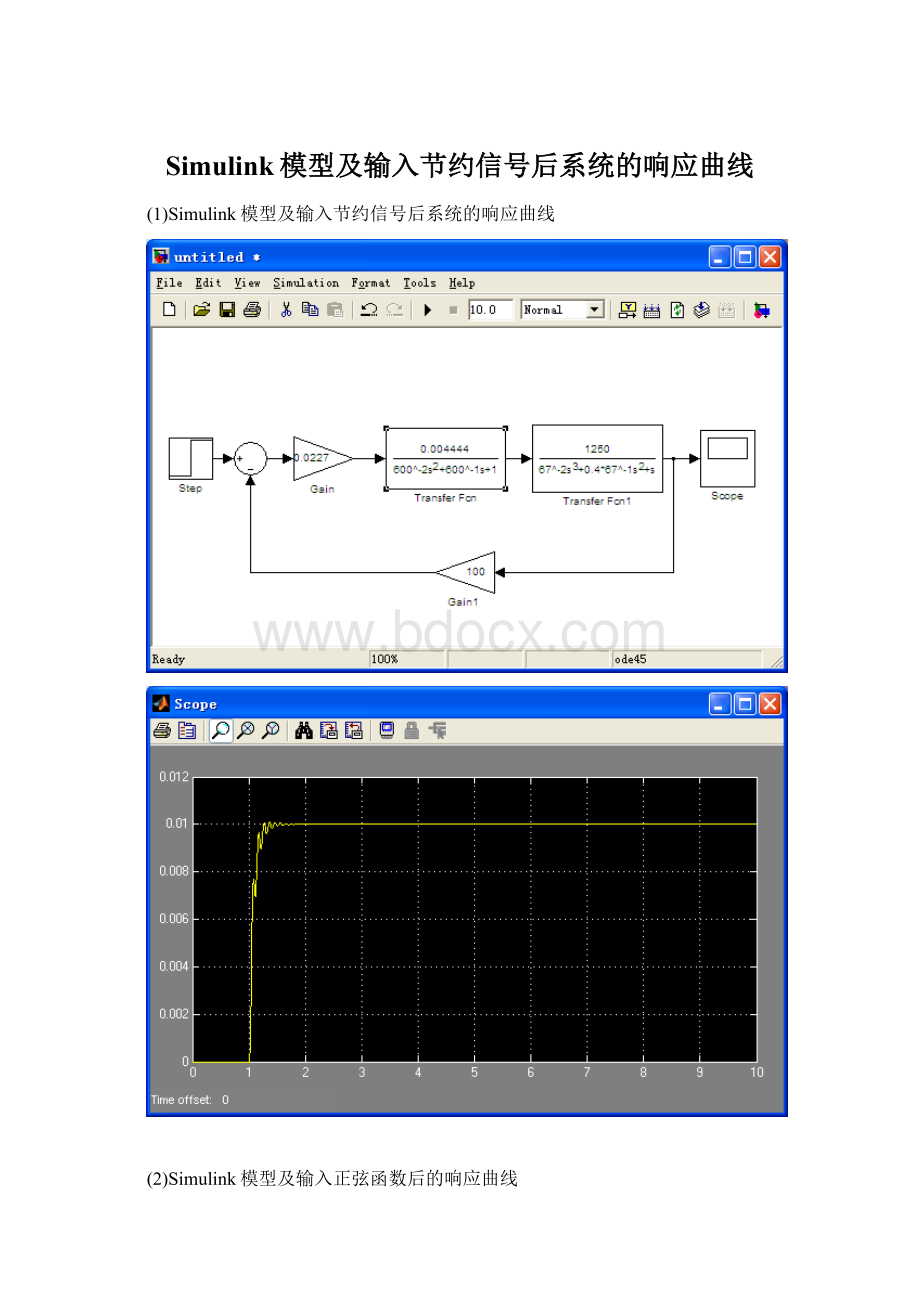
(1)Simulink模型及输入节约信号后系统的响应曲线
(2)Simulink模型及输入正弦函数后的响应曲线
(3)速度校正
k=4
k=8
k=16
结论:
随着k值的增大,系统系统响应逐渐不稳定
(4)PID校正
图一
Kp=0.1,ki=1,kd=0.05
图二
Kp=0.5,ki=1,kd=0.05
图三
Kp=1,ki=1,kd=0.05
图四
Kp=2,ki=1,kd=0.05
图五
Kp=2.2,ki=1,kd=0.05
图六
Kp=2.3,ki=1,kd=0.05
图七
Kp=2.5,ki=1,kd=0.05
图八
Kp=1,ki=10,kd=0.05
图九
Kp=1,ki=100,kd=0.05
图十
Kp=1,ki=200,kd=0.05
图十一
Kp=1,ki=0.5,kd=0.01
图十二
Kp=1,ki=0.5,kd=0.1
图十三
Kp=1,ki=0.5,kd=0.2
结论
由一至七图可以看出积分和微分环节一定时,比例环节在1——2.2之间是输出波形和输入波形重叠比较好,当比例环节大于2.2时,输出波形震荡比较明显。
由八、九、十图可以看出比例和微分一定时,积分对系统稳定性影响较小,当积分大于100左右时波形出现震荡,大于200时系统输出不稳定。
由图十一、图十二、图十三可以看出比例和积分一定时,微分要小于等于0.1,波形能较好的显示而大于等于0.2时波形出现了震荡,系统输出不稳定。
 升级会员
升级会员 