第6章全站仪测量技术分解.docx
《第6章全站仪测量技术分解.docx》由会员分享,可在线阅读,更多相关《第6章全站仪测量技术分解.docx(20页珍藏版)》请在冰豆网上搜索。
第6章全站仪测量技术分解
第六章 全站仪测量技术
全站型电子速测仪简称全站仪,它是一种可以同时进行角度(水平角、竖直角)测量、距离(斜距、平距、高差)测量和数据处理,由机械、光学、电子元件组合而成的测量仪器。
由于只需一次安置,仪器便可以完成测站上所有的测量工作,故被称为“全站仪”。
本章主要讲述全站仪的测量原理和技术,并指出全站仪在使用过程的注意事项。
通过本章的学习学生应能够:
理解全站仪的构造与测量原理;正确操作和使用全站仪;学会全站仪的基本测量方法和主要模块测量技术。
第一节概述
早期的全站仪是将电子经纬仪与光电测距仪组装在一起,称为积木式全站仪,积木式全站仪可以拆分成电子经纬仪和测距仪两个独立的部分。
后来改进成将光电测距仪的光波发射接收系统的光轴和经纬仪的视准轴组合为同轴的整体式全站仪,并且配置了微处理机(CPU)、储存单元和输入输出设备(I/O),从而使全站仪能根据外业观测数据(角度、距离)实时计算并显示出所需要的测量成果:
平距、高差或点的三维坐标等。
通过输入输出设备可以与计算机交互通讯,一方面可以将测量数据直接传输至计算机,进行计算、编辑和绘图;另一方面,测量作业所需要的已知数据也可以从计算机输入全站仪。
一、全站仪的结构原理
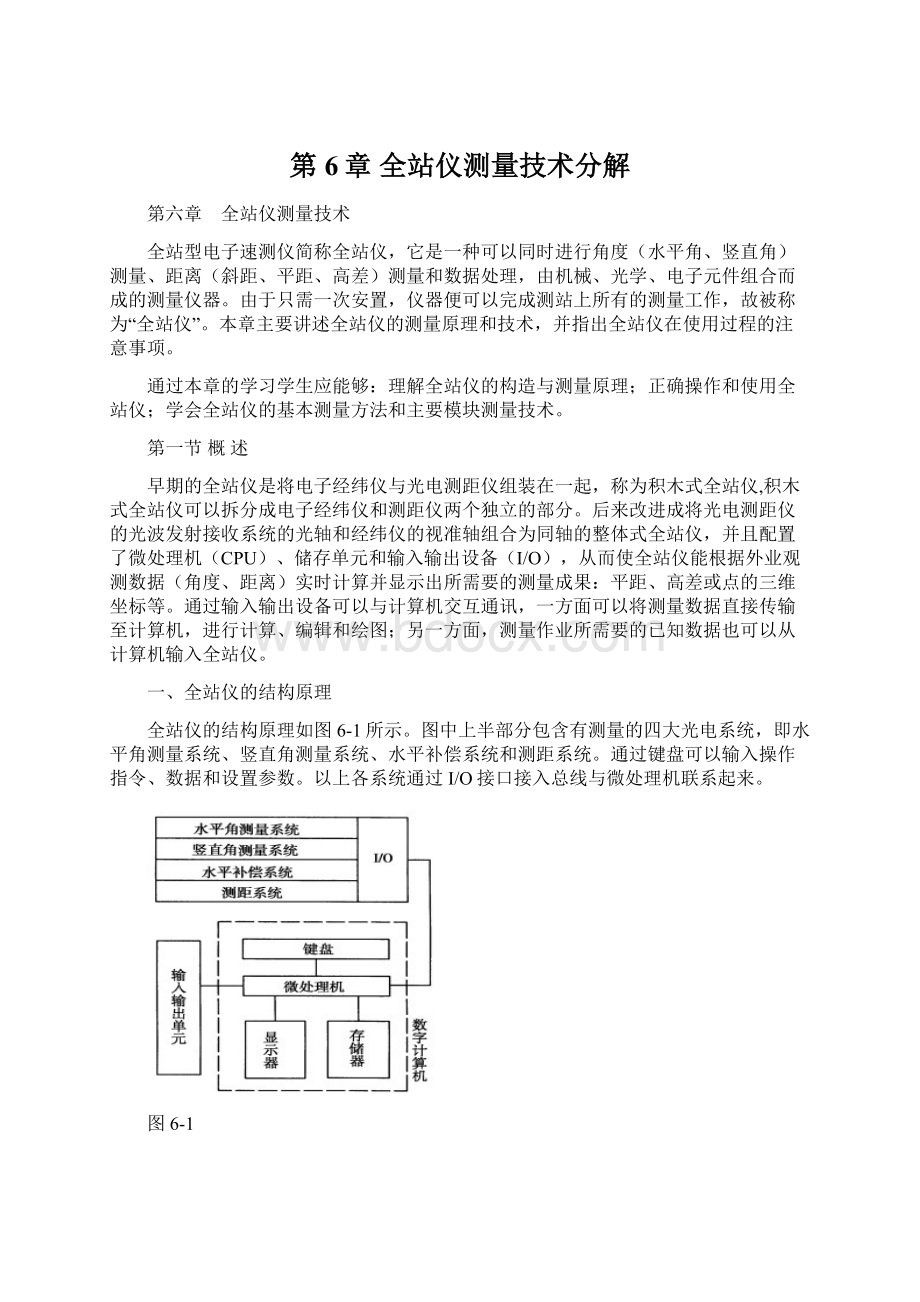
全站仪的结构原理如图6-1所示。
图中上半部分包含有测量的四大光电系统,即水平角测量系统、竖直角测量系统、水平补偿系统和测距系统。
通过键盘可以输入操作指令、数据和设置参数。
以上各系统通过I/O接口接入总线与微处理机联系起来。
图6-1
微处理机(CPU)是全站仪的核心部件,主要有寄存器系列(缓冲寄存器、数据寄存器、指令寄存器)、运算器和控制器组成。
微处理机的主要功能是根据键盘指令启动仪器进行测量工作,执行测量过程中的检核和数据传输、处理、显示、储存等工作,保证整个光电测量工作有条不紊地进行。
输入输出设备是与外部设备连接的装置(接口),输入输出设备使全站仪能与磁卡和微机等设备交互通讯、传输数据。
二、典型全站仪简介
目前,国内外许多著名的测绘仪器生产厂商均生产有各种型号的全站仪,图6-2所示是瑞士徕卡公司生产的TPS1100系列全站仪,它具有如下特点:
图6-2
1.马达驱动与自动目标识别。
在自动目标识别模式下,只需要粗略照准棱镜,仪器内置的CCD相机立即对返回信号加以分析,并通过伺服马达驱动照准部与望远镜旋转,自动照准棱镜中心进行测量,并自动进行正、倒镜观测。
该观测模式对于需要进行多次重复观测的点非常有用,如可以实现对大型水坝变形点进行无人值守的连续观测。
2.自动跟踪。
在自动跟踪模式下,仪器能自动锁定目标棱镜并对移动的360°棱镜进行自动跟踪测量,仪器内设的智能化软件利用CCD相机对返回信号进行分析处理,排除外界其它反射物体成像的干扰,可以保证在锁定目标暂时失锁时,也能立即恢复跟踪。
3.镜站遥控测量。
镜站可以通过操作RCS1100控制器遥控测站的全站仪进行放样测量,放样数据及测得的镜站当前坐标直接显示在RCS1100控制器中,这使得一个人进行测量成为可能。
4.无反射棱镜测量。
仪器内置有红外光和可见激光两种测距信号,当使用激光信号测距时,可以不用反射棱镜,直接照准目标测距。
无棱镜测距的范围为1.5m~80m,加长测程的仪器可以达到200m,测距精度3mm+2ppm。
该功能对测量天花板、壁角、塔楼、隧道断面等有用。
5.支持用户自编应用程序。
仪器提供了GeoBASIC语言,它与标准BASIC语言相似,提供了数学计算、字符串管理和文件操作等功能。
在使用GeoBASIC语言编程时,通过大量调用仪器提供的子程序,可以很容易编写出满足特定需要的应用程序。
将编写出的应用程序装入仪器中后,应用程序将成为仪器菜单中的一部分。
图6-3为日本拓普康公司的GTS-600系列全站仪,它具有如下的特点:
图6-3
1.仪器的ROM中固化有MS-DOS3.22操作系统,用户可以修改仪器自带的应用程序,也可以开发适合特殊需要的应用程序,系统提供给用户存储应用程序的空间达2MB。
2.仪器用于存储测量数据的内存为320KB,可以存储约5000个点的坐标数据,如果不够,可以使用闪存卡。
仪器使用16MB或32MB两种PCMCIA(personalcomputermemorycardinternationassociation)闪存卡,数据采集完成后,可以从仪器中取出闪存卡,并将其插入卡适配器中,再将插入了闪存卡的卡适配器装入计算机的PCMCIA卡槽中(笔记本电脑一般都带有PCMCIA卡槽),即可将闪存卡中的数据读入计算机。
3.仪器除带有一个RS-232C串行接口外,还带有一个12针的并行接口,将Centronics标准(12针)的打印机连接到并行接口,操作仪器可以直接打印测量成果。
4.自动调焦。
观测员只需要使望远镜大致照准棱镜,按下仪器上的“AF”键,仪器就会立刻对目标棱镜进行自动调焦。
5.防水。
仪器按照IEC529标准制造,具有超强的防水性能,当水龙头的水从任何方向喷射仪器的外壳时,均不会对仪器的性能产生影响。
6.可选配的定线点指示器。
定线点指示器可以同时发射两束光,其中一束为恒定激光,用于指向;另一束为闪烁光,用于帮助司镜员正确识别定线方向。
7.屏幕显示采用全中文菜单界面,便于中国用户操作与使用。
图6-4为中国南方公司生产的NTS系列全站仪,它具有如下的特点:
图6-4
1.NTS的技术指标为:
角度测量:
显示1″(5″)。
距离测量:
精度:
±(5mm+5ppm.D);
测程,1.5-2.5Km;
测量时间,正常测距6S,
连续测距3S,跟踪测距1S。
2.南方NTS全站仪键盘操作键功能见图6-5所示。
图6-5
3.南方NTS全站仪基本应用操作
1)仪器安置。
注意:
(1)仪器对中整平后应纵转望远镜的初始化操作,此时屏幕显示两行角度值。
(2)应用中未关机,电池不得卸下。
(3)仪器不平时屏幕将显示不平情况。
2)测量准备。
(1)角度测量:
HRHL的设定;方向值零;度盘配置。
(2)距离测量:
反射器常数气象改正的设定。
(3)加常数乘常数的设定。
3)角度测量。
从显示窗获得瞄准目标后的方向值,或按REC键。
4)距离测量。
(1)测距方式选择。
按MODE键一次。
(2)连续测距。
瞄准反射器后,显示窗有“*”标志,按MEAS键,每3秒测距。
中断按MODE键。
(3)单次测距。
瞄准反射器后,显示窗有“*”标志,连续按MEAS键二次,6秒测距。
连续按MODE键二次,回角度测量。
(4)跟踪测距。
瞄准反射器后,显示窗有“*”标志,按TRK键,每1秒测距。
中断按MODE键。
4.NTS设有数据存储器。
仪器可采用外接数据存储器(或称电子手簿)。
仪器机内设数据存储器,可存1000组测量数据。
图6-6是全站仪的配套棱镜示意图。
图6-6
第二节全站仪的测量原理
全站仪的基本功能是测量水平角、竖直角和斜距,借助于机内固化的软件,可以组成多种测量功能,如可以计算并显示平距、高差以及镜站点的三维坐标,进行偏心测量、悬高测量、对边测量、面积计算等。
全站仪具有的显著特点是三同轴望远镜,即:
在全站仪的望远镜中,照准目标的视准轴、光电测距的红外光发射光轴和接收光轴是同轴的,其光路如图6-7所示。
因此,测量时使望远镜照准目标棱镜的中心,就能同时测定水平角、垂直角和斜距
图6-7
一、测角原理
光学经纬仪是通过光学元件,利用几何光学的放大和折射来进行水平和竖直刻度盘读数的。
而全站仪则利用电子经纬仪的光电转换原理和微处理机,自动对度盘进行读数并显示出来(具体测量原理和方法详见第三章第六节),使观测时操作简单、避免产生读数误差。
二、测距原理
1.光电测距仪的测程与测距精度
光电测距仪的测程是指一次所测得的最远距离,一般认为:
(1)短程测距仪—测程在5km以内;
(2)中程测距仪—测程在5~30km;
(3)远程测距仪—测程在30km以上。
光电测距仪的测距精度是该仪器重要的技术指标之一,其表达式为:
md=±(a+bppmD)(6—1)
式中:
md—测距中误差,mm;
a—固定误差,mm;
b—比例误差;
D—距离,km。
2.测距原理
1)脉冲法测距的基本原理
脉冲法测距就是直接测定仪器所发射的脉冲信号往返于被测距离的传播时间,从而得到待测距离。
图6—8为其工作原理示意图。
图6—8
由光电脉冲发射器发射出一束光脉冲,经发光学射系统投射到被测目标,与此同时由棱镜取出一小部分光脉冲,送入光电接收系统,并由光电接收器转换为电脉冲(称为主脉冲波),作为计时的起点;从被测目标反射回来的光脉冲也通过光电接收系统后,由光电接收器转换为电脉冲(也称为回脉冲波),作为计时的终点。
由此可见主脉冲波和回脉冲波之间的时间间隔是光脉冲在测线上往返传播的的时间t,而t是通过计数器并由标准时间脉冲振荡器不断产生的具有时间间隔Δt的电脉冲数n来决定的。
因为
t=n·Δt(6—2)
则D=1/2·C·n·Δt(6—3)
在测距之前,“电子门”是关闭的,标准时间脉冲不能进入计数系统。
测距时在光脉冲发射的同一瞬间,主脉冲把“电子门”打开,标准时间脉冲就一个一个地经过“电子门”进入计数系统,计数系统就开始记录脉冲数。
当回拨脉冲到达时就把“电子门”关上,计数器就停止计数。
由此可见计数器所记录的脉冲数目就代表了标准时间脉冲震荡器所产生的Δt的数目。
2)相位法测距的基本原理
如图6-9所示,用全站仪测定A、B两点的距离,在A点安置全站仪,在B点安置棱镜。
由全站仪发出的调制光波,经过距离D达棱镜,经棱镜反射后回到仪器接收系统。
如果能测出调制光波在距离D往返传播的时间t,距离D按下式计算:
图6-9
(6-4)
式中:
c——调制光在大气中的传播速度。
目前,要想直接通过测定时间t来达到较高的测距精度是很难做到的,因此采用间接测时的方法,即通过测定连续调制光信号在测线上往返传播的相位差进行测距,称为相位法测距。
光电测距系统多以砷化镓发光二极管作为光源,给发光二极管加上频率为f的交变电流,其发出光的强度也按频率f发生变化,这种光称为调制光。
通过测量连续的调制光信号在待测距离上往返传播所产生的相位变化来间接地测定信号抟播的时间,从而求得被测距离。
为便于说明,将由棱镜返回的光波在测线方向上展开,如图6-10所示。
调制光返回到A点的相位比发射时延迟了
:
图6-10
(6-5)
式中N为完整波形的个数,
为不足一个整波的相位尾数。
又因
(6-6)
式中f为调制光的频率。
则有
(6-7)
将式(6-6)和(6-7)代入式(6-4)得
(6-8)
顾及调制光的波长
(6-9)
则
(6-10)
令
则
(6-11)
与钢尺量距公式相比,若把
视为整尺长,则N为整尺段数,
·ΔN为不足一整尺的零尺段长,所以通常就把
称为“光尺”的长度。
光尺长度可由下式确定:
(6-12)
光在大气中的传播速度c为:
(6-13)
式中:
c0——是光波在真空中的传播速度,迄今所知的精确数值为c0=299792458±1.2m/s;
n——为大气折射率,它与气温、气压等因素有关,因此在光电测距过程中,还需测定现
场的气温和气压,对所测距离作气象改正。
由于测相装置只能测定不足一个整周期的相位差
,不能测定整周期数N,只有当光尺长度大于待测距离时,方可确定距离值(此时N=0),否则就存在多值解问题。
因此,要想使仪器具有较大的测程,就应选用较长的光尺(通过改变调制信号的频率f来改变光尺长度),例如用10m的光尺只能测定10m以内的距离,用1000m的光尺就能测定1000m以内的距离。
同时由于仪器的测相误差与光尺长度成正比,约为光尺长度的1/1000,因此光尺越长,测距误差就越大。
为了既保证测程又保证精度,目前多采用两把光尺配合使用,一把光尺的调制频率为15MHz,光尺长度为10m,用来确定米、分米、厘米、毫米位数,以保证测距精度,称为精测尺;另一把光尺的调制频率为150kHz,光尺长度为1000m,用来确定米、十米、百米位数,以满足测程要求,称为粗测尺。
把两把测尺结合起来,就可直接测定1000m以内距离。
光电测距测定的是斜距,再通过竖直角观测,可计算两点间的平距和高差。
3)水平距离和高差测量
如图6-11所示,在A点安置全站仪,B点置棱镜,全站仪可根据测得的斜距S和视线方向的竖直角
自动计算水平距离D和高差h:
图6-11
(6-14)
(6-15)
或
(6-16)
式中:
hi——仪器高;
hr——棱镜高。
以上公式是未考虑大气折光和地球曲率改正时的计算公式,全站仪在进行距离测量时,已顾及到大气折光和地球曲率改正,大气折光和地球曲率改正均由全站仪自行完成。
第三节全站仪的操作与使用
在公路与桥梁测量中,应根据测区平面控制测量的等级与测距精度要求来选用全站仪。
具体规定见表6-1。
全站仪(测距)的选用表6-1
测距仪精度等级
每公里测距中误差mD(mm)
适用的平面控制测量等级
Ⅰ级
mD≤±5
二、三、四等,一、二级
Ⅱ级
±5<mD≤±10
三、四等,一、二级
Ⅲ级
±10<mD≤±20
一、二级
不同型号的全站仪,其具体操作方法会有较大的差异。
下面简要介绍全站仪的基本操作与使用方法。
一、测前的准备工作
1、安置仪器
将全站仪安放到测站三脚架上,对中并整平。
多数全站仪有双轴补偿功能,所以仪器整平后,在观测过程中,既使气泡稍有偏离,对观测也无影响。
把棱镜安置在测点上。
2、开机
按POWER或ON键,开机后仪器进行自检,自检结束后进入测量状态。
有的全站仪自检结束后须设置水平度盘与竖盘指标,设置水平度盘指标的方法是旋转照准部,听到鸣响即设置完成;设置竖盘指标的方法是纵转望远镜,听到鸣响即设置完成。
设置完成后显示窗才能显示水平度盘与竖直度盘的读数。
3、照准
全站仪照准被测点上的棱镜。
二、全站仪的基本测量技术
全站仪的基本测量技术包括光电测距、电子测角(水平角、竖直角)两部分,显示的数据为观测数据,测量的原理及技术要求与光电测距仪和电子经纬仪相同。
1、距离测量
距离测量必须选用与全站仪配套的反光棱镜共同完成。
由于光电测距为仪器中心到棱镜中心的倾斜距离,因此仪器和棱镜均需要精确对中、整平。
在距离测量前应进行气象改正、棱镜类型选择、棱镜常数改正、测距模式的设置和测距回光信号的检查。
仪器的各项改正要按设置仪器参数,经微处理器对原始观测数据计算并改正后显示观测数据和计算数据的。
测距参数包括气象改正(ppm);棱镜常数改正(PC:
一般PC=-30mm);仪器加常数改正(K)。
距离测量的一般操作方法是:
(1)设置棱镜常数
测距前须将棱镜常数输入仪器中,仪器会自动对所测距离进行改正。
(2)设置大气改正值或气温、气压值
光在大气中的传播速度会随大气的温度和气压而变化,15℃和760mmHg是仪器设置的一个标准值,此时的大气改正为0ppm。
实测时,可输入温度和气压值,全站仪会自动计算大气改正值(也可直接输入大气改正值),并对测距结果进行改正。
(3)量仪器高、棱镜高并输入全站仪。
(4)距离测量
照准目标棱镜中心,按测距键,距离测量开始,测距完成时显示斜距、平距、高差。
全站仪的测距模式有精测模式、跟踪模式、粗测模式三种。
精测模式是最常用的测距模式,测量时间约2.5S,最小显示单位1mm;跟踪模式,常用于跟踪移动目标或放样时连续测距,最小显示一般为1cm,每次测距时间约0.3S;粗测模式,测量时间约0.7S,最小显示单位1cm或1mm。
在距离测量或坐标测量时,可按测距模式(MODE)键选择不同的测距模式。
应注意,有些型号的全站仪在距离测量时不能设定仪器高和棱镜高,显示的高差值是全站仪横轴中心与棱镜中心的高差。
2、角度测量
角度测量的主要误差是仪器的三轴误差(视准轴、水平轴、垂直轴),对观测数据的改正可按仪器参数设置结果由仪器自动完成。
垂直角可测量天顶距或竖直角。
度量单位一般不需要设置。
仪器在出厂时已按照用户对象由生产厂家完成度量单位的设置。
角度测量的一般操作方法是:
(1)按角度测量键,使全站仪处于角度测量模式,照准第一个目标A。
(2)设置A方向的水平度盘读数为0°00′00″。
(3)照准第二个目标B,此时显示的角度读数即为两方向间的水平角和B方向的竖直角。
三、全站仪的模块测量技术
全站仪的模块测量技术包括水平距离和高差切换显示、三维坐标测量、放样测量、悬高测量、对边测量、偏心测量、面积测量等。
应特别注意的是只要开机电子测角系统即开始工作,并随仪器望远镜找准目标的变化实时显示观测数据,测量模块只是测距及数据处理,测量结果为计算数据,且只是半个测回的测量结果。
全站仪的测量模块很多,但不同类型的仪器大同小异。
本书就在路桥工程建设中常用的三个模块做一般介绍。
1、三维坐标测量
全站仪可直接测算测点的三维坐标(X,Y,H)。
如图6-12所示,A为测站点,B为后视点,两点坐标分别为(XA,YA,HA)和(XB,YB,HB),求测点P的坐标。
其数学模型为:
图6-12
(6-17)
(6-18)
(6-19)
式中
—所测方向与起始方向间的左角值。
在测站A安置全站仪后,设定测站点的三维坐标,并设置已知方向AB的水平度盘读数为其坐标方位角
,当照准目标P时,便可自动计算P点的坐标。
全站仪平面坐标测量原理是用极坐标法直接测定待定点坐标的,也就是在已知测站点架设全站仪,待定点设置棱镜,找准后同时采集角度和距离观测值,经微处理器实时进行数据处理,由显示器输出测量结果。
全站仪高程测量原理与三角高程测量的原理相同。
需要说明的是,全站仪上多用(N,E,Z)表示点的三维坐标,其中N对应X、E对应Y、Z对应H。
全站仪三维坐标测量的一般操作方法是:
(1)设定测站点的三维坐标。
(2)设定后视点的坐标或设定后视方向的水平度盘读数为其方位角。
当设定后视点的坐标时,全站仪会自动计算后视方向的方位角,并设定后视方向的水平度盘读数为其方位角。
(3)设置棱镜常数。
(4)设置大气改正值或气温、气压值。
(5)量仪器高、棱镜高并输入全站仪。
(6)照准目标棱镜,按坐标测量键,全站仪开始测距并计算显示测点的三维坐标。
2、放样测量
放样的基本工作包括角度和距离、平面位置及高程放样等多种形式。
在放样过程中,通过对找准目标点的角度、距离、坐标测量,仪器将显示输入放样值与实测值之间的差值,以指导放样。
用极坐标法放样点的平面位置,如图6--13所示,A、B为已知平面控制点,其坐标值分别为A(xA,yA)、B(xB,yB),P点放样点,其坐标值为P(xP,yP)。
首先计算放样数据DAP和β:
图6—13
(6-20)
(6-21)
(6-22)
(6-23)
将要测设的角度β和边长DAP(或坐标值)输入全站仪,在放样过程中仪器显示角度和边长的实测值与放样值之差,根据显示的偏离值及符号调整棱镜位置,直至偏离值为零,此时棱镜所处位置即为要测设的点位。
有的全站仪还可通过图形显示出棱镜上下左右前后的移动方向。
3、面积测量
利用全站仪的面积测量模块可进行土地面积测量工作,并能自动计算和显示所测地块的面积,特别适合于小范围的土地面积测量。
如图6--14所示,全站仪的面积测量原理是:
通过观测多边形各顶点的水平角βi、竖直角αi、以及斜距Si,先由观测数据自动计算出各顶点在测站坐标系xOy中的坐标(xi,yi)。
x轴指向水平度盘0°分划线,原点位于测站点O的铅垂线上,y轴垂直于x轴。
任一顶点的坐标可用下式进行计算:
(6-24)
(6-25)
然后再利用坐标值自动计算并显示被测多边形的面积A:
(6-26)
或
(6-27)
式中:
当i=1时,yi-1=yn,xi-1=xn;当i=n时,yi+1=y1,xi+1=x1。
对于如图6—15所示的1234为任意四边形。
欲测定其面积可在适当位置O点安置全站仪,选定面积测量模式后,按顺时针方向分别在四边形各顶点1、2、3、4上竖立棱镜,并进行观测。
观测完毕后仪器就会显示出该四边形的面积值。
图6—14
图6—15
第四节全站仪使用注意事项
全站仪是一种结构复杂、价格较贵的精密测量仪器。
如果仪器损坏或发生故障,都会给生产带来直接影响。
因此,使用时必须严格遵守操作规程,正确使用。
一、规范使用全站仪
应结合仪器认真阅读仪器使用说明书。
通过反复学习、使用和总结,力求做到“得心应手”,最大限度地发挥仪器的作用。
全站仪的测距头(望远镜)不能直接照准太阳,以免损坏测距的发光二极管。
在阳光下或阴雨天气进行测量时,应打伞遮阳、遮雨。
在整个测量过程中,观测者不得离开仪器,以免发生意外事故。
迁站时,即使距离较近,也应取下仪器装箱。
全站仪应保持干燥,遇雨后应及时将仪器擦干,放在通风处,完全凉干后才能装箱。
运输过程中应注意防震,长距离运输最好装在原包装箱内。
二、及时保养全站仪
仪器应经常保持清洁,用完后使用毛刷、软布将灰尘除去。
不能用手摸外露的光学部件如物镜、目镜等,这些部件如果脏了,可用吹风器吹去浮土,再用镜头纸擦净。
如果出现故障,应与仪器生产厂家或其委派的维修部联系修理,决不可自行折卸仪器,以免造成不应有的损害。
仪器应放在清洁、干燥、安全的地方,并应有专人保管。
棱镜应保持干净,不用时应装在箱内,以免碰坏。
电池充电应按说明书的要求进行。
三、正确使用全站仪的观测结果
全站仪的观测数据为水平角、竖直角和倾斜距离,其他测量方式实际上都是由这三个原始观测数据通过内置模块程序间接计算并显示出来的。
应特别注意的是,所有观测数据和计算数据都只是半个测回的数据,因此在等级测量中不能用内存模块功能计算结果,要通过记录所观测的水平角、竖直角和倾斜距离这三个原始数据进行平差计算。
全站仪角度测量是采用电子度盘,每一度盘位置可以设置为不同的角度值,如仪器照准某一后视方向时设置为0°,顺时针转动30°,显示角度为30°。
再照准同一后视方向设置为30°,再顺时针转动30°,则显示角度变为60°,而电子度盘的位置实际上并未改变,所以在使用时应注意,只要仪器在不同的测站点对中、整平后,对应电子度盘的位置已经固定,即使后视角度设置不同,角度值并不固定的对应度盘上某个位置。
测量时无需进行度盘配置。
四、全站仪的正、倒镜观测
光学经纬仪采用正、倒镜的观测方法进行角度测量时可以消除仪器的视准轴误差、水平轴倾斜误差和竖盘指标差。
全站仪虽然具有自动补偿改正功能,视准轴误差和竖盘指标差也可通过仪器检验后的参数预置自动改正。
但在不同的观测条件下,预置参数可能会发生变化导致改正数出现错误。
另外仪器自动改正后的残余误差也会给观测结果带来影响。
所以,在等级测量中仍需要正、倒镜观测,通过平差计算观测结果。
五、全站仪的左、右角观测
全站仪的右角观测(水平度盘刻度顺时针编号)是指仪器的水平度盘在望远镜顺时针转动时水平角度增加,逆时针角度转动时水平角度减少,左角观测则正好相反。
电子度盘的刻度可根据需要设置左、右角观测(一般为右角观测)。
这一点非常重要,在水平电子度盘设置时应特别注意,否则观测的水平角角度会出现错误。
如水平角实际为30°,则显示为330°。
特别是在平面坐标测量和施工放样测量中设置后视方位时,如果设置为左角就会出现测定点和测设点后视方位左右
 升级会员
升级会员 