自动控制原理胡寿松第四版课后答案.docx
《自动控制原理胡寿松第四版课后答案.docx》由会员分享,可在线阅读,更多相关《自动控制原理胡寿松第四版课后答案.docx(49页珍藏版)》请在冰豆网上搜索。
自动控制原理胡寿松第四版课后答案
1-3
解:
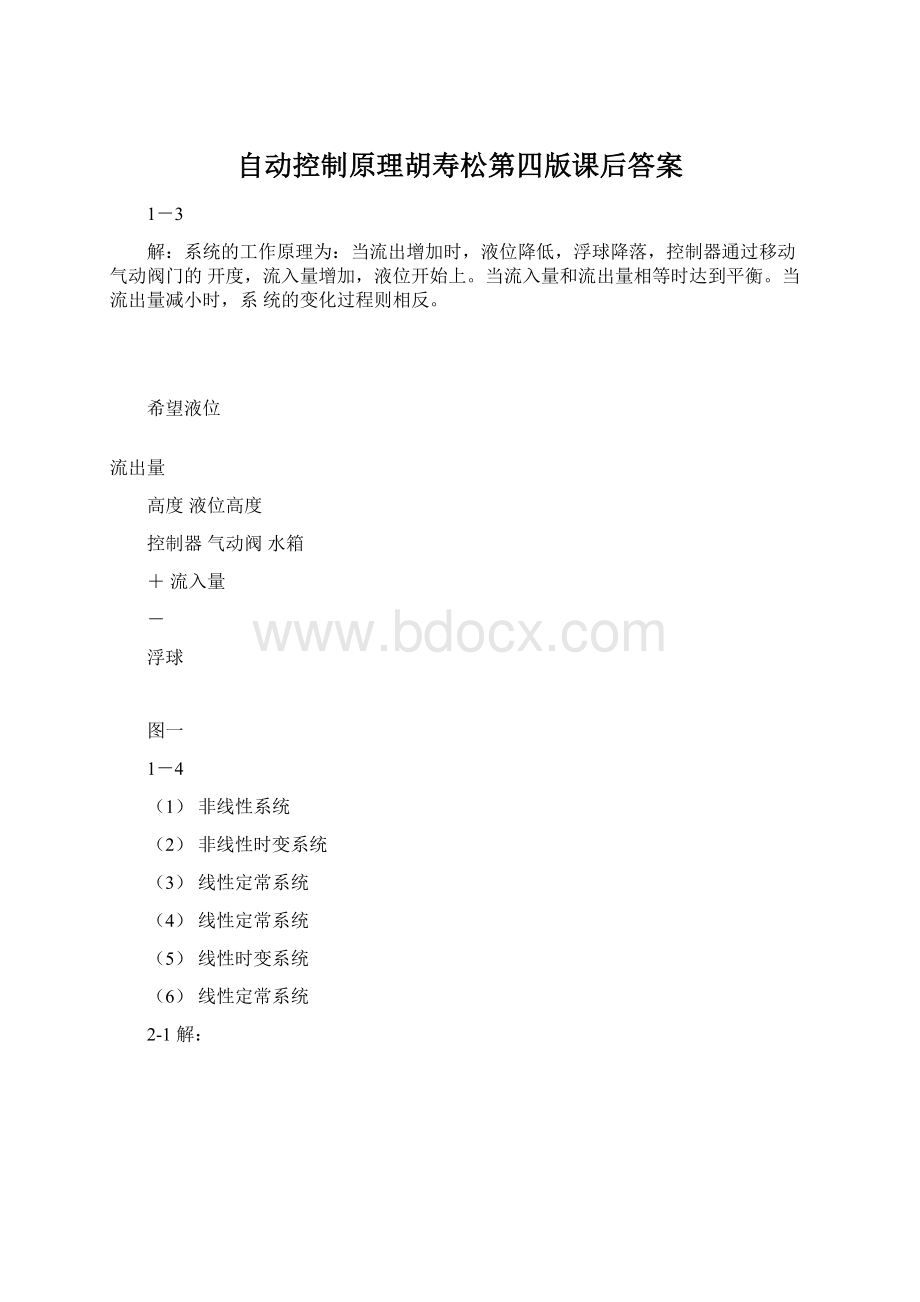
系统的工作原理为:
当流出增加时,液位降低,浮球降落,控制器通过移动气动阀门的开度,流入量增加,液位开始上。
当流入量和流出量相等时达到平衡。
当流出量减小时,系统的变化过程则相反。
希望液位
流出量
高度液位高度
控制器气动阀水箱
+流入量
-
浮球
图一
1-4
(1)非线性系统
(2)非线性时变系统
(3)线性定常系统
(4)线性定常系统
(5)线性时变系统
(6)线性定常系统
2-1解:
显然,弹簧力为kx(t),根据牛顿第二运动定律有:
F(t)−kx(t)=m
移项整理,得机械系统的微分方程为:
d2x(t)
dt2
2
mdx(t)+kx(t)=F(t)
dt2
对上述方程中各项求拉氏变换得:
ms2X(s)+kX(s)=F(s)
所以,机械系统的传递函数为:
G(s)=
X(s)=
F(s)
1
ms2+k
2-2解一:
由图易得:
i1(t)R1=u1(t)−u2(t)
uc(t)+i1(t)R2=u2(t)
duc(t)
i1(t)=C
dt
由上述方程组可得无源网络的运动方程为:
C(R+R)du2(t)
u(t)=CR
du1(t)
u(t)
12dt
+22+1
dt
对上述方程中各项求拉氏变换得:
C(R1+R2)sU2(s)+U2(s)=CR2sU1(s)+U1(s)
所以,无源网络的传递函数为:
G(s)=U2(s)=
U1(s)
1+sCR2
1+sC(R1+R2)
解二(运算阻抗法或复阻抗法):
U(s)
1
+R2
1+RCs
2=Cs=2
U(s)
R+1+R
1+(R+R)Cs
112
1Cs2
2-5解:
按照上述方程的顺序,从输出量开始绘制系统的结构图,其绘制结果如下图所示:
依次消掉上述方程中的中间变量X1,X2,X3,可得系统传递函数为:
C(s)=
R(s)
G1(s)G2(s)G3(s)G4(s)
1+G2(s)G3(s)G6(s)+G3(s)G4(s)G5(s)+G1(s)G2(s)G3(s)G4(s)[G7(s)−G8(s)]
2-6解:
①将G1(s)与G1(s)组成的并联环节和G1(s)与G1(s)组成的并联环节简化,它们的
等效传递函数和简化结构图为:
G12(s)=G1(s)+G2(s)
G34(s)=G3(s)−G4(s)
②将G12(s),G34(s)组成的反馈回路简化便求得系统的闭环传递函数为:
2-7解:
C(s)=
R(s)
G12(s)
1+G12(s)G34(s)
=G1(s)+G2(s)
1+[G1(s)+G2(s)][G3(s)−G4(s)]
由上图可列方程组:
[E(s)G1(s)−C(s)H2(s)]G2(s)=C(s)
R(s)−H1
(s)C(s)
G2(s)
=E(s)
联列上述两个方程,消掉E(s),得传递函数为:
C(s)=
R(s)
G1(s)G2(s)
1+H1(s)G1(s)+H2(s)G2(s)
联列上述两个方程,消掉C(s),得传递函数为:
E(s)=
R(s)
1+H2(s)G2(s)
1+H1(s)G1(s)+H2(s)G2(s)
2-8解:
将①反馈回路简化,其等效传递函数和简化图为:
0.4
1
G(s)=2s+1=
1+0.4*0.5
2s+1
1
5s+3
将②反馈回路简化,其等效传递函数和简化图为:
1
2
2
G(s)=s+0.3s+1=
5s+3
2
2
3
1+0.4
5s+4.5s
+5.9s+3.4
(s+0.3s+1)(5s+3)
将③反馈回路简化便求得系统的闭环传递函数为:
0.7*(5s+3)
Θo(s)=5s3+4.5s2+5.9s+3.4=
3.5s+2.1
Θi(s)
1+0.7*Ks(5s+3)
5s3
+(4.5+3.5K)s2
+(5.9+2.1K)s+3.4
5s
3-3解:
该二阶系统的最大超调量:
σp=e
−ζπ/
1−ζ2
*100%
当σp
=5%时,可解上述方程得:
ζ=0.69
当σp
=5%时,该二阶系统的过渡时间为:
ts≈
3
ζwn
所以,该二阶系统的无阻尼自振角频率wn
3-4解:
≈3
ζts
=3
0.69*2
=2.17
由上图可得系统的传递函数:
10*(1+Ks)
C(s)=
R(s)
s(s+2)
1+10*(1+Ks)
s(s+2)
==10*(Ks+1)
2
s+2*(1+5K)s+10
所以wn=
10,ζwn=1+5K
⑴若ζ
=0.5时,K≈0.116
所以K≈0.116时,ζ
=0.5
⑵系统单位阶跃响应的超调量和过渡过程时间分别为:
σp=e
−ζπ/
1−ζ2
*100%=e
−0.5*3.14/
1−0.52
*100%≈16.3%
ts=
3
ζwn
=3
0.5*
≈1.9
10
⑶加入(1+Ks)相当于加入了一个比例微分环节,将使系统的阻尼比增大,可以有效
地减小原系统的阶跃响应的超调量;同时由于微分的作用,使系统阶跃响应的速度(即变
化率)提高了,从而缩短了过渡时间:
总之,加入(1+Ks)后,系统响应性能得到改善。
3-5解:
由上图可得该控制系统的传递函数:
C(s)=
1
10K1
R(s)
二阶系统的标准形式为:
C(s)
R(s)
s2+(10τ+1)s+10K
w2
=n
s2+2ζws+w2
nn
所以
w
2
n=10K1
2ζwn=10τ+1
由
p
σ=e−ζπ/
π
1−ζ2
*100%
tp=
wn
1−ζ2
σp=9.5%
tp=0.5
可得
ζ=0.6
2
wn=10K1
ζ=0.6
wn=7.85
由和
2ζwn=10τ+1
wn=7.85
可得:
K1=6.16
τ=0.84
ts≈
3
ζwn
=0.64
3-6解:
⑴列出劳斯表为:
因为劳斯表首列系数符号变号2次,所以系统不稳定。
⑵列出劳斯表为:
因为劳斯表首列系数全大于零,所以系统稳定。
⑶列出劳斯表为:
因为劳斯表首列系数符号变号2次,所以系统不稳定。
3-7解:
系统的闭环系统传递函数:
K(s+1)
C(s)=
R(s)
=
s(2s+1)(Ts+1)=
1+K(s+1)
s(2s+1)(Ts+1)
K(s+1)
K(s+1)
s(2s+1)(Ts+1)+K(s+1)
2Ts3+(T+2)s2+(K+1)s+K
列出劳斯表为:
s32TK+1
s2T+2K
s1(K+1)(T+2)−2KTT+2
s0K
T>0,T+2>0,(K+1)(T+2)−2KTT+2
>0,K>0
T>0
K>0,(K+1)(T+2)−2KT>0
(K+1)(T+2)−2KT=(T+2)+KT+2K−2KT
=(T+2)−KT+2K=(T+2)−K(T−2)>0
K(T−2)<(T+2)
3-9解:
由上图可得闭环系统传递函数:
C(s)=
KK2K3
232323
R(s)(1+KKKa)s2−KKKbs−KKK
代入已知数据,得二阶系统特征方程:
(1+0.1K)s2−0.1Ks−K=0
列出劳斯表为:
s21+0.1K−K
s1−0.1K
s0−K
可见,只要放大器
−10
3-12解:
系统的稳态误差为:
ess
=lime(t)=limsE(s)=lims
R(s)
t→∞
s→0
s→01+G0(s)
⑴G0(s)=
10
s(0.1s+1)(0.5s+1)
系统的静态位置误差系数:
K=limG
(s)=lim10=∞
ps→00
s→0s(0.1s+1)(0.5s+1)
系统的静态速度误差系数:
K=limsG
(s)=lim
10s
=10
vs→00
s→0s(0.1s+1)(0.5s+1)
系统的静态加速度误差系数:
K=lims2G
(s)=lim
10s2
=0
as→00
s→0s(0.1s+1)(0.5s+1)
当r(t)=1(t)时,R(s)=1
s
ess
=lims
*1=0
当r(t)=4t时,R(s)=
s→010s
1+
s(0.1s+1)(0.5s+1)
4
s2
e=lims
*4=0.4
sss→0s2
当r(t)=t2时,R(s)=
1+10
s(0.1s+1)
 升级会员
升级会员 