项目二激光雷达的安装与标定调试工单.docx
《项目二激光雷达的安装与标定调试工单.docx》由会员分享,可在线阅读,更多相关《项目二激光雷达的安装与标定调试工单.docx(11页珍藏版)》请在冰豆网上搜索。
项目二激光雷达的安装与标定调试工单
项目二激光雷达的安装与标定
一、实验目的:
1.掌握激光雳达的拆卸与安装方法:
2.了解激光雷达的标定方法:
3.学会对激光雷达的数据及信号显示结果进行分析,从而判断故障。
二、实验要求:
1.实验前认真阅读实验指导书:
2.严格按照指导教师的指导进行操作。
三、实验设备:
1•实物:
智能网联汽车传感器实验台:
2.教具:
专用装卸工具、位姿调整装置等。
四、知识准备:
2.1激光需达传感器的概念
无人驾驶汽车怎么实现自动驾驶呢?
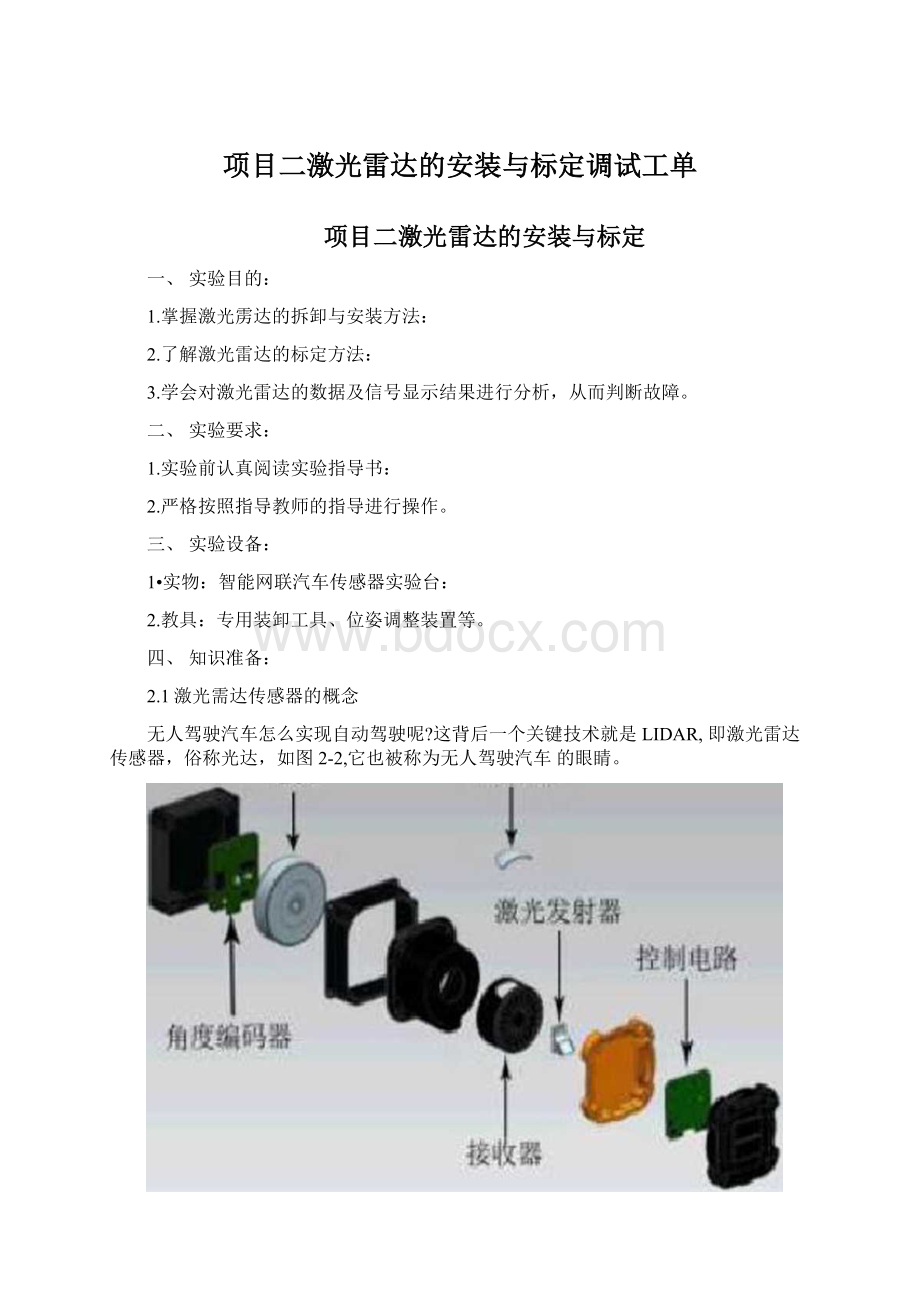
这背后一个关键技术就是LIDAR,即激光雷达传感器,俗称光达,如图2-2,它也被称为无人驾驶汽车的眼睛。
图2-1车载激光雷达零件分解图
激光雷达,英文全称为LightDetecticaAndRanging,简称LIDAR,即充探测与测量,是一种集激光、全球定位系统(GPS)和IMU(InertialMeasurcementUnit,惯性测量装置)三种技术于一身的系统,用于获得数据并生成精确的DEM(数字高程模型)。
这三种技术的结合,可以高度准确地定位激光末打在物体上的光斑,测距精度可达来级,激光雷达最大的优势就是“精准“和“快速、高效作业”。
它是一种用于精确获得三维位置;息的传感器,其在机器中的作用相当于人类的眼睛,能够确定物体的位置、大小、外部形貌甚至材质。
LIDAR通过测量激光你号的时间差、相位差确定距离,通过水平
旋转扫描或相控扫描测角度,并根据这两个数据建立二拳的极坐标系;
再通过获取不同端仰角度的信号获得第三炸的高度信息。
高频微光可在一秒内获取大量(206407数量级)的位置点信息
(称为点云),并根据这些信息进行三染建模。
除了获得位置信息外,
它还可通过激光信号的反射率初步区分不同材质,如图2-2所示。
图2-2RS-LIDAR-32点云效果图
2.2激光臂达传感器的类型
激光需达按有无机械旋转部件分类,分为机械激光需达和固态微光需达。
如图2-3和图2-4所示,机械微光需达带有控制激光发射角度的旋转部件,而园态激光需达则依靠电子部件来控制激光发射角度,无需机械旋转部件。
图2-3机械激光雷达图2-4固态微光需达
固态激光雷达优势:
响应速度快。
控制电压低,扫描角度大。
价格低。
由于内部结构有所差别,两科激光需达的体积大小也不尽相同。
机械激充需达体积较大、价格品费、测最精度相对较高,一般置于汽车外部。
国态激光雷达尺寸较小、性价比较高、测量精度相对低一些,但可隐藏于汽车车体内,不会破坏外形美观。
根据线束爱量的多少,激光雷达又可分为单级束激光雷达与多线束激光雷达。
顾名思义,单线束激光需达扫描一次只产生一条扫描线,其所获得的数据为2D数据,因此无法区别有关目标物体的3D信息。
不过,由于单线束激光雷达具有测量速度快、数据处理量少等特点,多被应用于安全防护、地彩测绘等领域。
传统的激光雳达扫描视场非常小,如果想360度的观察周围,怎么办?
最自然的办法就是多加几束激光,就数越多覆盖的角度越大。
多线束激光需达扫描一次可产生多条扫描线,日前市场上多线束产品包括4线束、8线束、26统束、32线束、64线束等,其细分可分为2.5D激光雷达及30激光需达。
2.5D激光需达与3D激光需达最大的区别在于微光需达垂直视野的范围,前者柔直视野范围一般不超过10°,而后者可达到30°甚至40以上,这也就导致两者对于激光需达在汽车上的安装位置要求有所不同。
2・3激光惯达做感器的测试与标定方法
2.3.1激光需达传感器的测试
在车载激允需达的评测中,需要针对测试指标构建车用激光需达测试场景,建立标定场、控制点和检测点,通过设置标靶,结合己有的高精度、高置信度测试仪器进行激光需达标定,通过控制点进行测评指标精度分析,结合检测点进行指标精度对比分析,最后形成指标参数精度的置信描述。
比较重要的激光需达测评参数包括:
最大测面为最初看到采样目标的而离;检测距离为检测到有效目标时的距离:
分类距离为能够将车辆等目标与其他物体分离出来的距离;最住分类距离为能够将日标的形状识别出来的最住距离。
2.3.2激光雷达的标定
激光雷达与车体为刚性连接。
两者间的相对姿态和位移固定不变,为了建立各个激光需达之间的相对坐标关系,需要对激光需达的安装进行简单的标定,并使激光雷达数据从激光雷达坐标统一转换至车体坐标上。
通过建立车辆质心坐标系,雷达基准坐标系以及车载激光雷达坐标系,将激光需达的数据转换到基准坐标系中,再将其统一转换到车辆坐标系下。
激充需达外部安装参数的标定,通常采用等腰直角三角标定板和正方形标定板来完成。
需要标定的激光雷达的安装参数包扌舌激光雷达的仰角与侧倾角等。
其他较好的标定方法还包括交互信息最大化外部自动标定法。
激光摄像头融合的边缘对齐联合口动标定法和测距与图像融合的基于线段外部参数标定法等,如图2-5所示。
图2-5激光雷达在UBER无人车上的安装位置
五、实验步骤方法及往意事现:
1•实验实施步骤:
(1)拆卸
1)切断实验台电源。
请勿带电作业:
2)将激光需达电漂及控制线束与其他功能部件新开;
3)使用专用工具将激光雷达从实验台取下(轻拿轻放),完成拆卸步骤,如图26所示。
图2-6激光雷达拆卸图
(2)安装
1)确定微光雷达的安装高度以及安装仰角度(激光雷达安装的俯仰角度为180°,横摇角为0P(360),侧倾角为0(360),安装高度根据前方障碍物高度进行调整,横向安装位置为车锅正中央轴线上),如图2-7所示,使用专用工具将激光雷达与实验台进行结构安装;
横摆角侧倾角
俯仰角
图2-7各位姿调整装置刻度示意图
2)将激光需达电源及控制线束与其他功能部件连接,如图2-8所示;
图2-8激光雷达信号愉出控制线束
3〉接通实验台电源,激光雷达安袭完毕。
如图2-9所示。
图2-9激光
图2-9激光雷达安装完成图
(3)标定
激光雷达标定的目的是求解激光雷达测量坐标系相对于其他测量坐
标系的相对变换关系,以便获取障碍物相对本车的距离、速度、角度
等信息。
以单线激光雷达为例,介绍激光雷达安装在真实车辆中的标定理。
选定车体坐标X轴为激光雷达扫描角度为零时车体的指向,Z轴指向车体上方,XYZ轴构成右手系,单线激光雷达所有的扫描点在同一个几何平而St,将扫描点P投影到坐标面和坐标轴,如图2-10
所示。
图2-10单线激光雷达模型
从而得到扫描点P在车体坐标系中的坐标
ft:
osOrosot)
ftin0
-ho—ft*osOsinot)-
式中:
p是扫描点到激光雷达的距离;8是扫描角度;ao是安装俯角;ho是安装咼度。
上而的公式可以重写为:
Ix、y.乙1|丁=/i*o.0o)(ao>.
上述公式实现了由激光雷达数据点(0,6)到三维空间坐标的转换,其中(ho,a0)为标定参数。
本实验台中,当激光雷达的位姿调整装置中的三个刻度盘均指示
为0时,即标定完成。
在激光雷达安装完毕后,标定参数保持不变。
(4)调试
1)激光雷达工作时,每一组采样数粥都是通过通讯接口输出,如图2-11所示。
输岀数据具有统一的报文格式,外部系统可以通过请求、停止等指令控制激光需达管出数据,或者对输出数据的格式进行配置。
图2-12激光需达通讯接口
2)打开电脑上的实验台实训操作界而,选择“传感器的安装与标定一
激光雷达的安装与标定“菜单,点击“开始实验”,此时,软件界面
中包括两个活动区域。
分别是“激光雷达实时显示界“和“激光雷达
数据流是示界面”。
点击“启动雷达”后,雷达启动,此时,“激光雷
达实时显示界而“是示数据点云图,“激光雷达数据流显示界面“是
示实时的数据流,如图2-12所示。
图2-12激光雷达实时数据采集图
3)通过观察激光雷达数据采集情况,明确安装、通信、标定等步骤是否准确完成。
确认无误后,可点击“关闭雷达”,关闭激光雷达。
也可点击“保存数据”,对雷达采集的数据进行保存,便于后期的调用和分析。
2•注意事项:
1)实验台使用过程中和准备上电之前,必须确保所有侧板完好,必须确保没有人员接触路而、本车、前车等可动部件,否则可能造成人员伤害。
2)实验台使用过程中和准备上电之前,必须确保道路路面上没有异物,否则可能造成设备损坏。
3)非专业人员严禁打开电控柜,否则可能造成设备或人身伤害。
4)实验台必须由经过培训的人员操作,否则可能造成设备故障。
5)实验台使用AC220V电源供电,直接接触强电端子等带电裸露部分可能造成人身伤亡。
6)实验台使用时必须可靠接地,接地电阻小于4欧姆。
而且定期检查实验台各部分的接地情况。
7)操作前应检查所使用的工具是否完好、齐全。
操作时工具必须摆放整齐,不得随意乱放,操作后应将工具清点检查并擦干净,按要求放入工具车或者工具箱内。
8)在使用实训台架前应对试验台进行完整的检查,确认实训台架完好无损坏、无故障。
9)设备在运行时禁止直接切断电源,否则会损坏电器元件。
10)实训室应通风良好,避免高温多湿以及直接日晒,无易燃/腐蚀性气体和液体,避免对台架及而板造成损坏。
12)在做教学实验和维护时应遵循维修手册的操作严格执行,否则可能会对设备造成损坏。
12)长时间不使用本实训台应拔下电源插头。
13)操作使用时必须在专业老师的指导下进行实训操作。
14)检查各个线路连接处有无松脱,以及各线路有无破损,如有,应用电工胶布包好,以防止漏电产生短路。
15)在进行实训操作时不要带手表、戒指,也不要穿宽大的衣服,避免产生不必要的伤害。
16)严禁在使用过程中抽烟或产生明火。
17)做试验台元器件拆装实验时必须遵循正确的工具使用方法和拆装零部件的先后顺序。
项目二激光雷达的安装与标定调试工单
学生姓名
班级
学号
成
绩
实验地点
日期
所需器材
仪器设备:
工量具:
材料:
实验目的
1.掌灵激允雷达的拆阳与安装方法:
2.了解激光•雷达的标宦方法:
3.学会对激光雷达的数漏及信号显示结果进行分析,从而判断故障。
实验步骤
2.注意:
安装和桥卸微充雷达时应切新,请匆.
2.使用专用工具常激充雷达从实验台取下前,一泄要先将激光需达电源及与其他功能部脊断开。
3.使用专用工具将激光雷达与实检台选行结构安装前,要确怎微充雷达的安装
高度和_
4.微充需达工作时,每一组采样数据驾是场过输出.输密数系具
有统一的根文格式输出,外部系统可以游过等拥今控制微完雷达输出数据,或者对输出数据给格式选行配置。
5.激光雷达标建的日的是求解相对于其他测疑坐标系的
相对变换关系,以便获取障群物板对本车的距离、速度、角度等信息。
6.打开“微光雷达的安装与标泄“操作界而后,凝光雷达数漏浓显示异而”中会是示算法都析后做障碍物的信息。
任务总结
你可以从收获、问题与建议等方留进行总站
 升级会员
升级会员 