自动控制原理胡寿松主编课后习题答案详解.pdf
《自动控制原理胡寿松主编课后习题答案详解.pdf》由会员分享,可在线阅读,更多相关《自动控制原理胡寿松主编课后习题答案详解.pdf(102页珍藏版)》请在冰豆网上搜索。
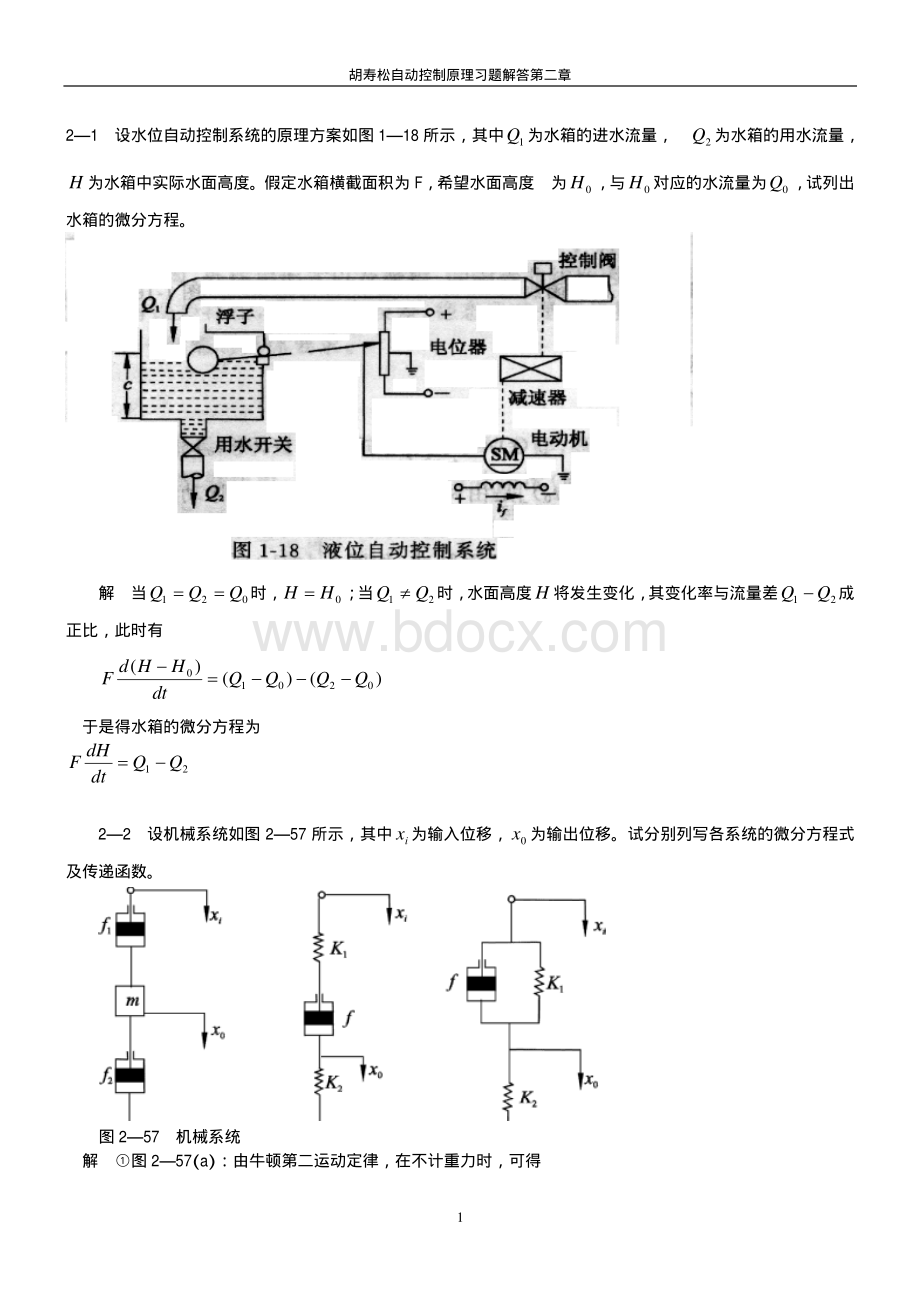
胡寿松自动控制原理习题解答第二章21设水位自动控制系统的原理方案如图118所示,其中Q为水箱的进水流量,为水箱的用水流量,12QH为水箱中实际水面高度。
假定水箱横截面积为F,希望水面高度为,与对应的水流量为,试列出水箱的微分方程。
0H0H0Q解当Q时,H;当021QQ=0H=21QQ时,水面高度H将发生变化,其变化率与流量差Q21Q成正比,此时有)()()(02010QQQQdtHHdF=于是得水箱的微分方程为21QQdtdHF=22设机械系统如图257所示,其中为输入位移,为输出位移。
试分别列写各系统的微分方程式及传递函数。
ix0x图257机械系统解图257(a):
由牛顿第二运动定律,在不计重力时,可得1胡寿松自动控制原理习题解答第二章00201)(xmxfxxfi&=整理得dtdxfdtdxffdtxdmi1021202)(=+将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得)()()(10212ssXfsXsffmsi=+于是传递函数为2110)()(ffmsfsXsXi+=图257(b):
其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:
)()(01xxfxxKi&=)(002xxfxK&=消去中间变量x,可得系统微分方程dtdxfKxKKdtdxKKfi1021021)(=+对上式取拉氏变换,并计及初始条件为零,得系统传递函数为212110)()()(KKsKKfsfKsXsXi+=图257(c):
以的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:
0x0201)()(xKxxfxxKii=+&移项整理得系统微分方程iixKdtdxfxKKdtdxf10210)(+=+对上式进行拉氏变换,并注意到运动由静止开始,即0)0()0(0=xxi则系统传递函数为)()()(2110KKfsKfssXsXi+=2-3试证明图2-58()的电网络与(b)的机械系统有相同的数学模型。
2胡寿松自动控制原理习题解答第二章图2-58电网络与机械系统解:
(a):
利用运算阻抗法得:
11111/111111111111+=+=+=sTRsCRRsCRsCRsCRZ()()1111122222222+=+=+=sTsCsCRsCsCRZ所以:
)1)(1()1)(1()1(11)1
(1)()(2121212211222120+=+=+=sTsTsCRsTsTsTsCsTRsTsCZZZsUsUi(b)以和之间取辅助点A,并设A点位移为1K1fx,方向朝下;根据力的平衡原则,可列出如下原始方程:
)()()(010202xxfxxfxxKii&=+
(1))(011xxfxK&=
(2)所以(3)xKxxfxxKii10202)()(=+&对(3)式两边取微分得xKxxfxxKii&10202)()(=+(4)将(4)式代入
(1)式中得)()()()(021021011021021xxffxxKfxfKxxfKxxKKiiii&=+整理上式得iiiixKKxfKxKfxffxKKxfKxfKxKfxff21212121021021011021021+=+&对上式去拉氏变换得3胡寿松自动控制原理习题解答第二章)()()()(212121221021211121221sXKKsfKKfsffsXKKsfKfKKfsffi+=+所以:
21221221212212212122122121212111212212121212210)1)(1()1)(1
(1)
(1)()()()()(1111KfsKfsKfsKfsKfKfsKfKfsKKffsKfKfsKKffKKsfKfKKfsffKKsfKKfsffsXsXi+=+=+=所以图2-58()的电网络与(b)的机械系统有相同的数学模型。
24试分别列写图2-59中个无源网络的微分方程式。
解:
(a):
列写电压平衡方程:
Ciuuu=0dtduCCC=i11RuiCR=()210021210)(RRuudtuudCRRudtduCRiiuiiCCRC+=+=+=整理得:
iiuRRCdtduCRuRRCdtduCR122012021+=+(b):
列写电压平衡方程:
10Ciuuu=
(1)dtduCiCC111=
(2)dtRiudCdtduCiRuiRRiuCCCCCCCC)(210222111112i=+=+=(3)4胡寿松自动控制原理习题解答第二章即:
dtRiudCiRuCCC)(210211=+(4)将
(1)
(2)代入(4)得:
2122102010)(2dtudRCCdtduCdtuudCRuuCii=+即:
20221222102011022dtudRCCdtudRCCdtduCdtduCdtduCRuRuiii+=+整理得:
dtduCRudtudRCCRudtduCCdtudRCCiii122210012202212)2(+=+2-5设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态。
(1);)()(2ttxtx=+&解:
对上式两边去拉氏变换得:
(2s+1)X(s)=1/s212411)12
(1)(22+=+=ssssssX运动模态te5.0所以:
)1
(2)(21tettx=())。
ttxtxtx()()()(=+&解:
对上式两边去拉氏变换得:
1)()1(2=+sXss4/3)2/1
(1)1
(1)(22+=+=ssssX运动模态tet23sin2/所以:
=tetxt23sin32)(2/(3)。
ttxtxtx
(1)()
(2)(=+&解:
对上式两边去拉氏变换得:
ssXss1)()12(2=+222)1(1111)1
(1)12
(1)(+=+=+=sssssssssX5胡寿松自动控制原理习题解答第二章运动模态e)1(tt+所以:
)1(11)(teteetxttt+=2-6在液压系统管道中,设通过阀门的流量满足如下流量方程:
PKQ=式中K为比例常数,P为阀门前后的压差。
若流量Q与压差P在其平衡点附近作微小变化,试导出线性化方程。
),(00PQ解:
设正常工作点为A,这时00PKQ=在该点附近用泰勒级数展开近似为:
)()()(000xxdxxdfxfyx+=即Q)(010PPKQ=其中011210PKdPdQKPP=2-7设弹簧特性由下式描述:
1.165.12yF=其中,是弹簧力;是变形位移。
若弹簧在变形位移附近作微小变化,试推导的线性化方程。
解:
设正常工作点为A,这时1.10065.12yF=在该点附近用泰勒级数展开近似为:
)()()(000xxdxxdfxfyx+=即)(010yyKFF=其中1.001.0011.1915.131.165.120yydydFKyy=2-8设晶闸管三相桥式全控整流电路的输入量为控制角,输出量为空载整流电压,它们之间的关系为:
cos0ddEe=式中是整流电压的理想空载值,试推导其线性化方程式。
解:
设正常工作点为A,这时00cosddEE=6胡寿松自动控制原理习题解答第二章在该点附近用泰勒级数展开近似为:
)()()(000xxdxxdfxfyx+=即)(cos000=sddKEe其中00sinddsEddeK=2-9若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应c,试求系统的传递函数和脉冲响应。
tteet+=21)(解:
对输出响应取拉氏变换的:
)2)(1(2411211)(2+=+=sssssssssC因为:
)
(1)()()(sssRssC=所以系统的传递函数为:
22111)2)(1
(1)2)(1(24)(2+=+=+=ssssssssss系统的脉冲响应为:
tteettg2)()(+=2-10设系统传递函数为232)()(2+=sssRsC且初始条件c(0)=-1,(0)。
试求阶跃输入r(t)=1(t)时,系统的输出响应c(t)。
c&解:
由系统的传递函数得:
)
(2)
(2)(3)(22trtcdttdcdttcd=+
(1)对式
(1)取拉氏变换得:
)
(2)
(2)0(3)(3)0()0()(2sRsCcssCcscsCs=+&
(2)将初始条件代入
(2)式得sssCss123)()23(2=+即:
2214123622)23(32)(222+=+=+=sssssssssssssC所以:
tteetc2242)(+=7胡寿松自动控制原理习题解答第二章2-11在图2-60中,已知和两方框相对应的微分方程分别是)(20)(10)(6tetcdttdc=+)(10)(5)(20tctbdttdb=+且初始条件均为零,试求传递函数及)(/)(sRsC)(/)(sRsE解:
系统结构图及微分方程得:
10620)(+=ssG52010)(+=ssH250230120)520(200200)520)(106()520(200520101062011062010)()
(1)(10)()(2+=+=+=+=ssssssssssHsGsGsRsC25023012050015001200200)520)(106()106)(520(105201010620110)()(110)()(22+=+=+=+=sssssssssssHsGsRsE2-12求图2-61所示有源网络的传递函数解:
(a)0000000000001111/CRTsTRsCRsCRsCRZ=+=+=8胡寿松自动控制原理习题解答第二章)1()()(001010+=sTRRZRsUsUi(b)0000000000001111/CRTsTRsCRsCRsCRZ=+=+=1111111111CRTsCsTsCRZ=+=+=)1)(1
(1)()(0110010+=sTsTsCRZZsUsUi(c)2221221221221221221121)1(111/)1/(CRTRsTsTRsCsTRsCsTRsCsTRsCRRZ=+=+=+=+=11)()(122010120+=RsTsTRRRZsUsUi2-13由运算放大器组成的控制系统模拟电路如图2-62所示,试求闭环传递函数U()()。
图2-62控制系统模拟电路解:
0101)()()(RZsUsUsUi=+
(1)0212)()(RZsUsU=
(2)0220)()(RRsUsU=(3)式
(1)
(2)(3)左右两边分别相乘得9胡寿松自动控制原理习题解答第二章02020100)()()(RRRZRZsUsUsUi=+即2213002213000)()
(1)()()(RZZRsUsURZZRsUsUsUii=+=+所以:
1)()(221300=RZZRsUsUi21302121221130221122130221221300)1(111111)()(RRsRCsTRRRsCsTRRRsCsTRRZZRRZZRZZRsUsUi+=+=+=+=2-14试参照例2-2给出的电枢控制直流电动机的三组微分方程式,画出直流电动机的结构图,并由结构图等效变换求出电动机的传递函数和)(/)(sUsam)(/)(sMscm解:
由公式(2-2)、(2-3)、(2-4)取拉氏变换)()()(sIRsLsEsUaaaaa=+)()(sCsEmea=)()(sMsICmam=)()()(sfsJsMsMmmmcm=+得到系统结构图如下:
Ua(s)Ia(s)CmCeMmMc1Las+RaJms+fm1m(s)10胡寿松自动控制原理习题解答第二章memmaammmaamemmaamamCCfsJRsLCfsJRsLCCfsJRsLCsUs+=+=)(111)()(memmaaaammaamemmcmCCfsJRsLRsLfsJRsLCCfsJsMs+=+=)(111)()()(/)(0ssi0016515VK=3103
 升级会员
升级会员 