高校工业机器人虚拟仿真实训中心建设方案.pdf
《高校工业机器人虚拟仿真实训中心建设方案.pdf》由会员分享,可在线阅读,更多相关《高校工业机器人虚拟仿真实训中心建设方案.pdf(21页珍藏版)》请在冰豆网上搜索。
1工业机器人教学实训工业机器人教学实训室方案室方案1、XS-XN虚拟工业机器人教学实训系统技术指标虚拟工业机器人教学实训系统技术指标:
(可对(可对FANUCFANUC、ABBABB、KUKAKUKA、MOTOMANMOTOMAN(安川)等工业机器人进行现场示教编程学习)(安川)等工业机器人进行现场示教编程学习)1.11.1、虚拟工业机器人教学实训系统组成:
虚拟工业机器人教学实训系统组成:
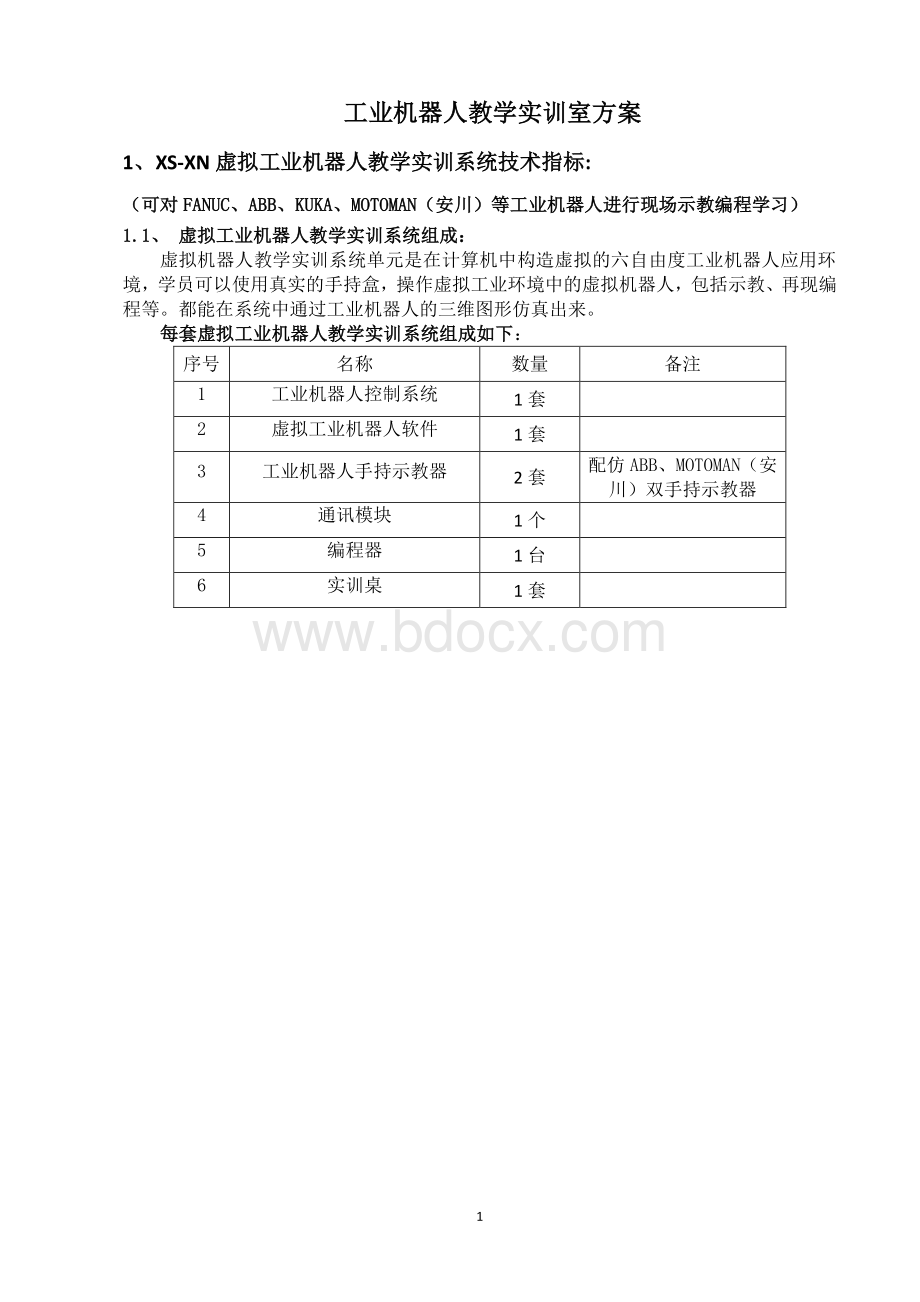
虚拟机器人教学实训系统单元是在计算机中构造虚拟的六自由度工业机器人应用环境,学员可以使用真实的手持盒,操作虚拟工业环境中的虚拟机器人,包括示教、再现编程等。
都能在系统中通过工业机器人的三维图形仿真出来。
每套虚拟工业机器人教学实训系统组成如下每套虚拟工业机器人教学实训系统组成如下:
序号名称数量备注1工业机器人控制系统1套2虚拟工业机器人软件1套3工业机器人手持示教器2套配仿ABB、MOTOMAN(安川)双手持示教器4通讯模块1个5编程器1台6实训桌1套2配仿ABB、MOTOMAN(安川)双手持示教工业机器人手持示教工业机器人手持示教器可根据需求选配器可根据需求选配31.21.2、虚拟工业机器人教学实训系统功能要求:
虚拟工业机器人教学实训系统功能要求:
该实训系统需采用真实的工业机器人控制系统和真实手持示教器控制虚拟的工业机器人完成工业机器人的现场示教编程教学要求。
该实训系统配两个不同工业机器人手持示教盒,通过更换手持示教器能够对ABB、FANUC两种品牌工业机器人进行现场示教编程训练;该实训系统能够支持外部三维模型的导入功能,增加教学的多样性。
该实训系统具有工业机器人的理论考试考工及实践考试考工功能,能够自动出题、评分。
该实训系统具有机器人碰撞检测功能,可以检测学示教过程中发生的碰撞错误。
1.31.3虚拟工业机器人教学实训系统技术要求:
虚拟工业机器人教学实训系统技术要求:
序号名称技术参数1工业机器人控制系统1、采用完全工业用六自由度机器人控制器;2、控制系统能够和多个品牌工业机器人手持示教器通讯,通过更换手持示教器能够对FANUC、ABB、KUKA、MOTOMAN(安川)多种品牌工业机器人进行现场示教编程训练;3、控制系统能够实时控制虚拟机器人的位置、动作及状态;4、控制系统预留二次开发接口,控制系统能够根据用户的需求开放相应的算法,以实现工业机器人原理性实验。
5、该实训系统具有工业机器人的理论考试考工及实践考试考工功能,能够自动出题、评分。
6、工业机器人控制系统具有自主知识产权(提供相关证明)2虚拟工业机器人软件该单元可模拟工业机器人的示教/再现过程,通过真实的机器人手持盒编辑工业机器人的程序并动态模拟工业机器人的运动过程,观察工业机器人的运动结果,检验所编写工业机器人程序的正确性;具有工业机器人轨迹训练、搬运、焊接、装配、机床上下料等场景;具有工业机器人模型库,可根据用户需求选择机器人,如ABB、KUKA、FANUC、MOTOMAN(安川)等品牌机器人模型;预留二次开发接口,机器人模型和场景用户可以自己添加。
支持物理仿真(外力、重力、反弹、摩擦力、碰撞、声光电烟雾等效果)通过佩戴3D眼镜,可以实现沉浸感比较好的工业机器人虚拟现实3D仿真(带至招标现场演示)4工业机器人考核系统(带至招标现场演示)1)理论考试系统:
a.B/S结构(浏览器和服务器结构)网页登陆b.后台管理平台(学生管理、教师管理、试题管理、成绩管理)c.学生使用帐号密码登陆、选科目、计时考试。
2)操作考试系统:
a.示教器操作考试b.自动出题c.自动打分虚拟工业机器人软件具有自主知识产权(提供相关证明)3工业机器人手持示教器1、采用完全真实的工业机器人手持示教器。
2、手持示教器1:
采用工业机器7寸液晶触摸屏,3D摇杆控制,键盘采用优质薄膜开关,方便后期维护,具有方式选择、急停、使能开关,能够对ABB工业机器人的示教编程进行教学。
3、手持示教器2:
采用工业级5.6寸液晶显示器,键盘采用优质薄膜开关,方便后期维护,具有方式选择、急停、使能开关。
能够对MOTOMAN(安川)双手持示教器工业机器人的示教编编程进行教学。
4、以上两种手持示教器需带至现场演示。
4通讯模块用于工业机器人手持盒与编程器之间的通讯:
1、完全兼容USB(UniversalSerialBus)Rev2.02、支持RS-485/422接口3、RS-422/485接口DB9针型连接器4、数据(TXD)自动流控,零延时设计5、1Mbps以上数据传输速率6、支持自动握手协议7、支持远程唤醒和电源管理8、USB总线直接取电,无需外接电源5编程器(计算机)AMD处理器,1GBDDR3显卡,内存2GB,硬盘:
500G,DVD光驱,光电鼠标,商务键盘(或更高配置)6实训桌材质:
采用优质冷轧板制作,厚度1.2mm。
表面处理:
表面采用整体磷化及静电喷塑处理。
尺寸:
700*500*1250mm51.41.4、基本技术参数基本技术参数输入电源:
AC220V10%(单相三线);配AC220V三眼插座1个整体功率:
400VA;工作环境:
温度-5C+40C;湿度85%(25C);海拔4000m;安全保护:
具有漏电保护,安全符合国家标准1.51.5、能够开设的实验内容能够开设的实验内容AA原理性实验:
原理性实验:
1.多自由度工业机器人关节运动控制底层算法实验2.多自由度工业机器人直线运动轨迹控制底层算法实验3.多自由度工业机器人圆弧运动轨迹控制底层算法实验4.多自由度工业机器人加减速约束控制底层算法实验B.B.应用性实验:
应用性实验:
1.工业机器人手持示教器的认知及使用实验2.工业机器人各类坐标系转换实验3.工业机器人编程指令的学习实验4.工业机器人工具坐标系和用户坐标系设置实验5.工业机器人控制器IO信号设置和监控实验6.工业机器人参数、变量的调整实验7.工业机器人程序调用和自动运行实验8.工业机器人机床上下料示教编程实验9.工业机器人的搬运/堆垛示教编程实验10.工业机器人的点胶/焊接示教编程实验11.工业机器人装配示教编程实验12.工业机器人碰撞实验C.C.技能考核技能考核1.工业机器人理论考试考工2.工业机器人实践考试考工1.61.6、配套资料配套资料工业机器人操作与编程理论教学大纲6工业机器人操作与编程实践教学大纲工业机器人操作与编程工业机器人操作与编程实验指导书工业机器人操作与编程授课计划工业机器人操作与编程教案71.7、虚拟工业机器人软件:
虚拟工业机器人软件:
虚拟机器人软件登录画面虚拟机器人软件登录画面工业机器人搬运工业机器人搬运8工业机器人轨迹训练工业机器人轨迹训练工业机器人焊接工业机器人焊接9工业机器人装配工业机器人装配工业机器人机床上下料工业机器人机床上下料10示教编程碰撞检测示教编程碰撞检测理论考试考工登陆理论考试考工登陆11理论考试考工画面理论考试考工画面实践考试考工登陆实践考试考工登陆12操作考试画面操作考试画面131.81.8、相关案例相关案例142.XSXS-IRB120IRB120-33型工业机器人型工业机器人应用应用工作站工作站:
(11)系统概述系统概述该设备主要提供一个开放式的平台,更多的是让老师、学生参与进来,充分发挥每个工作站的最大功能来进行示教教学。
学生可以根据任务不同,选择不同的工作站;也可以选择固定的工作站来制定不同的任务。
该系统主要包括:
1)工作台工作站2)机器人本体工作站3)搬运工作站4)码垛工作站5)模拟焊接工作站6)压铸工作站7)控制系统8)气动系统等组成。
(22)系统基本技术参数系统基本技术参数输入电源:
AC220VAC10%,50Hz;整机功率:
2Kw;气源要求:
0.4-0.6MPa(压力),55L/MIN(流量)设备尺寸:
L1600L1600W1350H1700;安全保护措施:
具有过载、短路、漏电等功能设备重量:
200Kg(3)3)系统的特点系统的特点功能齐全功能齐全该系统涵盖了多种机器人的功能应用,如抓取、搬运、码垛、轨迹模拟、生15产压铸等。
模块搭配灵活模块搭配灵活每个模块都有独立的气路和电路系统,模块间留有气源和线路接口,这样可以根据需要组成不同模块的选配,功能模块可以自由增减,搭配非常灵活。
涉及的专业领域广涉及的专业领域广该系统涉及了工业机器人、自动控制、位置控制、电机控制、气动控制、可编程控制器、传感器应用、网络通讯等多种技术,涵盖了自动化控制、计算机应用、物联网通讯、仓储物流等多个专业领域。
(4(4)实验实训内容实验实训内容1工业机器人编程与操作2工业业机器人软件使用;3工业机器人的集成及应用4工业机器人设备维护与维修5工业机器人搬运与码垛应用6工业机器人焊接应用7工业机器人压铸应用8电气安装与调试9机械安装与调试10PLC编程与应用11组态监控软件的编程与调试应用(选配)12触摸屏的编程与应用;(选配)13气动控制元件的安装与调试(55)主要配置清单主要配置清单序号序号名称名称规格规格数量数量单位单位品牌品牌1.工业机器人含IRB120-3/0.6六自由度3Kg工业机器人本体、IRC5控制器、示教器1套ABB2.供料传输单元由供料装置、传输带、编码器、直流减速电机2套定制3.压铸单元由供料装置、压铸活动模和固定模等组成1套定制4.检测单元由压铸检测平台及传感器组成1套定制165.模拟焊接单元模拟焊接板及校对装置组成1套定制6.码垛单元主体铝合金加工制作,包括码垛工作台1套定制7.电控系统由PLC及低压电气组成1套定制8.机器人手爪主要由母体工装、搬运工装、画笔工装、打磨抛光工装组成1套定制9.气动系统由电磁阀、真空发生器、气泵等气动元件组成1套定制173、六自由度工业机器人六自由度工业机器人(ABBIRB(ABBIRB-14101410工业机器人工业机器人)采用ABB的IRB-1410型六自由度工业机器人,该工业机器人由机器人本体、机器人控制器、示教单元、输入输出信号转换器和总线通讯模块组成,可对工件进行抓取、搬运、装配、打磨、焊接等操作。
机器人本体具体参数如下:
机器人本体具体参数如下:
手腕持重:
5kg最大臂展半径:
1.44m轴数:
6轴重复定位精度:
0.05mm(多台机器人测试综合平均值)机器人版本:
标准版防护等级:
IP54电源:
3相四线380V(+15%,-10%),50Hz耗电量:
4KVA机器人尺寸:
底座:
620X450mm机器人重量:
225kg环境温度:
5C-45C最大湿度:
95%18最大噪音:
70dB(A)轴运动:
轴运动工作范围轴1旋转+170-170轴2手臂+70-70轴3手臂+70-65轴4手腕+150-150轴5弯曲+115-115轴6翻转+300-3001944、六自由度工业机器人六自由度工业机器人(XSXS-RB06)RB06)工业机器人手持示教工业机器人手持示教器可根据需求选配器可根据需求选配20(11)、概述概述XS系列工业机器人,能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手主要由手部、运动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机
 升级会员
升级会员 