基于PID算法的温度控制系统的设计.pdf
《基于PID算法的温度控制系统的设计.pdf》由会员分享,可在线阅读,更多相关《基于PID算法的温度控制系统的设计.pdf(4页珍藏版)》请在冰豆网上搜索。
科技信息高校理科研究基于PID算法的温度控制系统的设计陕西理工学院物理系王小虎卢超摘要设计了一种温度控制系统。
以AT89S52单片机为核心,包括电源电路,温度信号采样电路,键盘及显示电路,加温控制电路等模块。
软件采用PID算法进行了建模和编程,在SIMULINK环境中进行了仿真,系统无稳态误差,调节时间为30s,无超调量,满足设计要求。
关键词温度控制单片机PID算法电加热温度控制具有升温单向性、大惯性、大滞后性和时变性的特点,应用传统的模拟电路控制方法,很难达到理想的控制效果。
采用模糊PID算法,运用AT89S52单片机对电阻炉温度实现智能控制,可以解决上述种种不足,实现高精度的控制。
1系统设计PID调节的温度控制系统的框图如图l所示。
由按键模块设定温嗖。
单片机对设定温度值进行查表计算后转换为对应的电压数字值,】|三过16位的数模转换器得到与之精确对应的电压信号,此电压值于温度传感器测量的电压值进行比较产生一个误差信号,经过PID电路后,获得一个控制量给加热电路,构成实时闭环系统,同时实际测量电压值并显示在显示模块上。
输出控制DA转换电路转换成电压信号来控制可控硅触发电路,从而控制可控硅通断率,通过调节加热功率即可达到控制温度恒定的目的。
显示模块I(:
=爿E二:
|E:
CA匕爿PK)电路匕爿功放温度传感器按键模块岸I一7童茄b回蹦加热电路图1系统原理框图2主要模块硬件电路设计21温度测量电路温度测量转换部分是整个系统的数据来源,直接影响系统的可靠性。
传统的温度测量方法是:
温度传感器例如AD590,将测量的温度转换成模拟电信号,再经过MD转换器把模拟信号转换成数字信号,单片机再对采集的数字信号进行处理,实现起来比较复杂,滤波消噪难度大,系统稳定性不高,设计采用数字式温度传感器DSl8820。
DSl8820为单总线接口,测量温度的范围为一55+125。
C。
温度采集电路如图2所示DQ为数字信号输入输出端;GND为电源地;VDD为外接供电电源输入端。
DSl8820的DQ引脚接AT89S52的P14口线,用于将采集到的温度送人单片机中处理,2脚和3脚之间接一个47K上拉电阻。
DSl8820内部结构主要由四部分组成:
64位光刻ROM、温度传感器、非挥发的温度报警触发器TH和TL、配置寄存器。
以12位转化为例,用16位符号扩展的二进制补码读数形式提供,以O0625LSB形式表达,其中s为符号位。
数据转换如下表l。
12位转化后得到的12位数据,存储在18820的两个8BYTE的RAM中,二进制中的前面5位是符号位,如果测得的温度大于0,这5位为0,将测到的数值乘于00625即可得到实际温度;如果温度小于0,这5位为1,测到的数值需要取反加l再乘于00625即可得到实际温度。
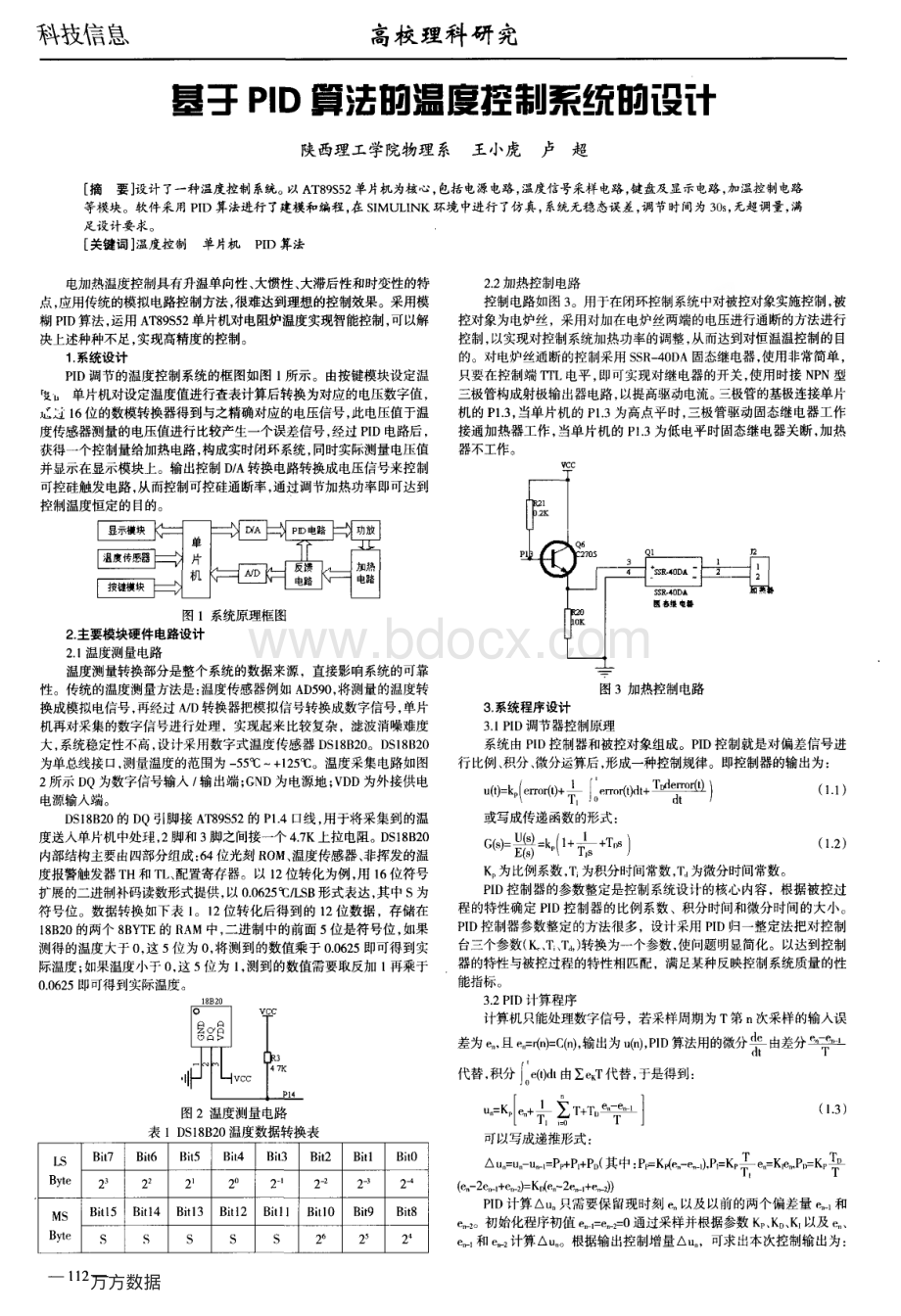
图2温度测量电路表1DSl8820温度数据转换表LSBit7Bit6Bit5Bit4Bit3Bit2BitlBit0Byte23222120212-22_32_4MSBitl5Bitl4Bitl3Bitl2BitllBitlOBit9Bit8ByteSSSSS26252411222加热控制电路控制电路如图3。
用于在闭环控制系统中对被控对象实施控制,被控对象为电炉丝,采用对加在电炉丝两端的电压进行通断的方法进行控制,以实现对控制系统加热功率的调整,从而达到对恒温温控制的目的。
对电炉丝通断的控制采用SSR一40DA固态继电器,使用非常简单,只要在控制端1TrL电平,即可实现对继电器的开关,使用时接NPN型三极管构成射极输出器电路,以提高驱动电流。
三极管的基极连接单片机的P13,当单片机的P13为高点平时,三极管驱动固态继电器工作接通加热器工作,当单片机的P13为低电平时固态继电器关断,加热器不工作。
VCC图3加热控制电路3系统程序设计3IPID调节器控制原理系统由PID控制器和被控对象组成。
PID控制就是对偏差信号进行比例、积分、微分运算后,形成一种控制规律。
即控制器的输出为:
u(t)=k,(eITO卅J。
tem郴+坠地dt邋)(11)或写成传递函数的形式:
G(s)=器=k。
1+专+T|)s)(12)K。
为比例系数,T,为积分时间常数,T。
为微分时间常数。
PID控制器的参数整定是控制系统设计的核心内容,根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。
PID控制器参数整定的方法很多,设计采用PID归一整定法把对控制台三个参数(k、T、Td,)转换为一个参数,使问题明显简化。
以达到控制器的特性与被控过程的特性相匹配,满足某种反映控制系统质量的性能指标。
32PID计算程序计算机只能处理数字信号,若采样周期为T第n次采样的输入误差为en,且e。
=n)=c(n),输出为u(n),PID算法用的微分ide由差分鱼;吐代替,积分ie(t)dt由eKT代替,于是得到:
un-Kple。
+T仉旦箐吐(13)可以写成递推形式:
Au。
=Hn-Hpl=PP+PI+PD(其中:
Pr=Kp(e。
一epl),PI=KP一e。
l-KIen,Pn=KP(en-2e,l+e,2)=KD(e-2e,l+e)PID计算u。
只需要保留现时刻e。
以及以前的两个偏差量e,。
和e。
初始化程序初值e,l_e。
_2_0通过采样并根据参数K,、K。
、K。
以及e。
、e,和e。
计算u。
根据输出控制增量u。
,可求出本次控制输出为:
万方数据科技信息高校理科研究U。
=u俨l+a11。
-11卅1+PP+PI+PD。
由于电阻炉一般是属于一阶对象和滞后的一阶对象,式中KP、KD、K。
的选择取决于电热丝的阶跃响应曲线和实际经验,设计采用Ziegler-Nicho|s提出的PID归一调整法,调整参数,主要是减少在线整定参数的数目,人为假定约束条件,以减少独立变量的个数,令:
T=0IT。
,T1_o5T。
,To=0125T。
,式中TU称为临界周期。
PID计算的程序流程图如图4所示。
图4P1D算法的流程图4系统测试和结语为了验证系统的准确性,在MATLAB的SIMULINK软件包中进行系统的仿真。
闭环调节系统可以用一个阶滞后环节来近似,方框图如图5所示。
可以得到系统PID调节的参数,当Kp=003,Ki=0029,Kd=0008时,系统无超调量,准确性高且调节时间为30s具有快速性。
设计的恒温控制系统不仅能满足各项设计指标,并且具有体积小,结构简单,价格便宜,准确性高,可行性强等优点。
瓶尹甚:
塑厂卅野一Lf一图5系统仿真方框图参考文献1徐薇莉,曹柱中控制理论与设计M上海交大出版社,200374-822卢超基于AT89C51多路信号检测和语音报警器的设计I佳木斯大学学报,2009,02:
1811843先锋工作室单片机程序设计实例M清华大学出版社,200314-304王幸之,钟爱琴等AT89系列单片机原理及接口技术M北京:
北京航天大学出版社,200439545卢超单片机同PC机通信的一种新方法I矿山机械,2007,04:
105-1076卢超分布式矿井温度监测系统的设计I煤炭科学技术,2007,12:
51-547李华MCS一51系列单片机实用接口技术M北京航空航天大学出版社,20018卢超单片机与PC机的通信设计I工矿自动化,2007,05:
1161189卢超负反馈放大电路的仿真分析I现代电子技术,2006,16:
11511710卢超PVDF型脉搏传感器信号处理电路的设计1齐齐哈尔大学学报(自然科学版),2009,06:
610(上接第11l页)处理方法相同,实验组和对照组也会因实验目的的不同而发生变化。
321实验目的相同,处理方法不同实验组和对照组的变换生物学实验具有一定的研究目的,也就是实验目的。
在实验中,实验手段的主动选择,实验对象的干预措施,实验的环境条件控制,都是受实验目的制约的。
因此,实验中的实验组就是针对实验目的来控制、干预研究对象而进行的实验操作,是用来证明实验假设的。
而对照组同样是针对实验目的,达到排除其他无关因素或非研究因素对研究对象的于扰而进行的操作。
只要明确实验目的与实验组和对照组的关系后,就不难区分实验组和对照组。
同一个实验,实验目的相同,实验组和对照组会因为处理方法的不同而发生变换。
如在做土壤中的细菌对农药是否有降解作用的实验,我们设置两组实验,甲组:
将土壤灭菌处理后,喷洒“敌草隆”,一段时间后检测土壤中“敌草隆”的含量;乙组:
土壤不经过灭菌处理,直接喷洒“敌草隆”,一段时间后检测土壤中“敌草隆”的含量。
根据实验组和对照组的含义,可以判断甲组(无细菌)为实验组,乙组(有细菌)为对照组。
但当实验处理方法改成将甲、乙两组土壤都先经过灭菌处理,然后对甲组土壤施加细菌,乙组土壤不施加细菌,甲乙两组土壤都喷洒“敌草隆”,一段时间后检测甲乙两组土壤中“敌草隆”的含量,此时,甲组(有细菌)的成了实验组,乙组(无细菌)的成了对照组。
322实验目的不同,处理方法相同实验组和对照组的变换同一个实验,实验处理方法相同,实验组和对照组也会因为实验目的的不同而发生变化。
如”pH值对唾液淀粉酶活性的影响”的实验中,我们设置三组实验,分别使酶处于pH值20、70和100的环境中,观察酶活性的强弱。
如果实验目的是为了验证唾液淀粉酶的最适pH值为70左右,则pH值为70处理的那组为实验组,pH值为20和pH值为100处理的组为对照组;但当实验目的是“验证强酸或强碱环境下唾液淀粉酶的活性”的情况下,pH值为20和pH值为100处理的组就成了实验组,pH值为70处理的那组就成为对照组了。
又如:
1864年,德国科学家萨克斯将绿色叶片放在暗处几小时,然后把此叶片一半遮光,一半曝光。
经过一段时间后,用碘蒸气处理叶片,成功地证明绿色叶片在光合作用中产生了淀粉。
萨克斯对这个实验的设计具有严密的逻辑性,具体体现在:
是曝光处作为对照实验还是遮光处作为对照实验。
在这个实验中,究竞是曝光处作为对照实验还是遮光处作为对照实验,这就要分析在当时的科学背景下,该实验的目的是为了“证明植物光合作用需要光照”还是“证明植物光合作用能产生淀粉”?
在1864年人们对光合作用的过程还不清楚,植物能否产生淀粉并不完全确定,不可能以淀粉作为检测光合作用是否进行的标准,由此可确定萨氏做该实验的目的是为了“证明植物在光下能产生淀粉”。
为了证明这一点,以达到这个实验目的,只需进行直接的实验证明即可:
直接把饥饿处理后无淀粉的叶片置于光下,观察有无淀粉产生即知,曝光处为实验组,遮光处为对照组。
并以此证明淀粉不是来源于其他途径,而是来自光合作用的过程。
以现在的科学背景来分析“萨克斯实验”,到底是曝光处为对照实验还是
 升级会员
升级会员 