欧拉角速率和机体角速度转换详细推导_精品文档.pdf
《欧拉角速率和机体角速度转换详细推导_精品文档.pdf》由会员分享,可在线阅读,更多相关《欧拉角速率和机体角速度转换详细推导_精品文档.pdf(2页珍藏版)》请在冰豆网上搜索。
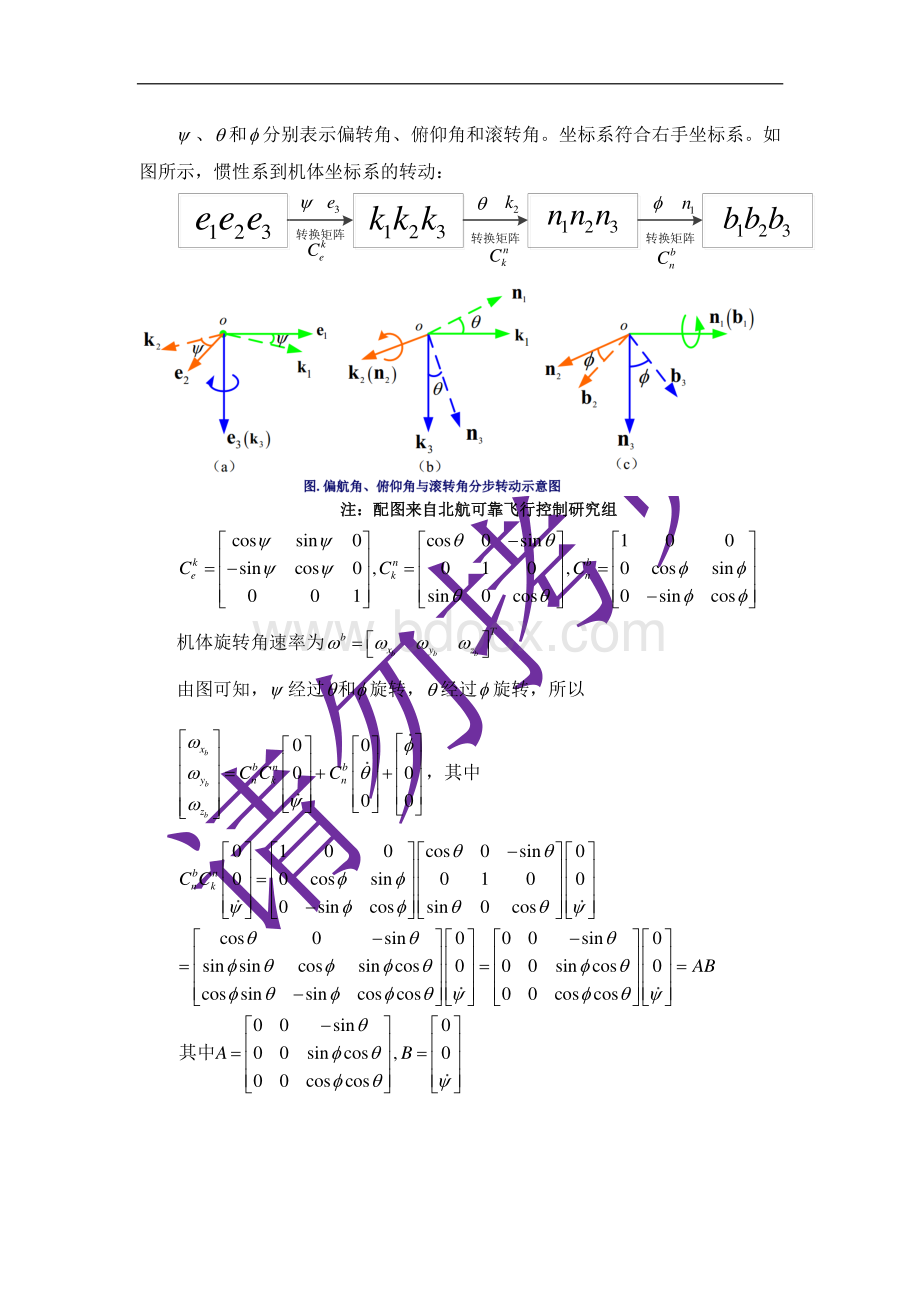
、和分别表示偏转角、俯仰角和滚转角。
坐标系符合右手坐标系。
如图所示,惯性系到机体坐标系的转动:
123kkk123eee123nnn123bbb3e2k1n转换矩阵keCnkC转换矩阵bnC转换矩阵注注:
配图来:
配图来自北航可靠飞行控制研究组自北航可靠飞行控制研究组cossin0cos0sin100sincos0,010,0cossin001sin0cos0sincosknbeknCCC机体旋转角速率为bbbTbxyz由图可知,经过和旋转,经过旋转,所以000000bbbxbnbynknzCCC,其中0100cos0sin000cossin01000sincossin0coscos0sin000sinsinsincossincos000sincoscossinsincoscos00coscbnnkCC00os00sin000sincos,000coscosABAB其中0100000000cossin0cos000sincos00sin0000000cos0,0sin00bnCMNMN其中1000010000010100010,00010PQPQ其中Bai由以上可知AMPBNQABMNPQ,其他项都为零。
则10sin0cossincos0sincoscosbbbxyzABMNPQAMPBNQ即10sin0cossincos0sincoscosbbbxyz注:
仅用于个人学习,未经同意不能私自上传注:
仅用于个人学习,未经同意不能私自上传其他网站其他网站
 升级会员
升级会员 