PLC理论知识培训资料补充部分.docx
《PLC理论知识培训资料补充部分.docx》由会员分享,可在线阅读,更多相关《PLC理论知识培训资料补充部分.docx(14页珍藏版)》请在冰豆网上搜索。
PLC理论知识培训资料补充部分
培训资料的补充:
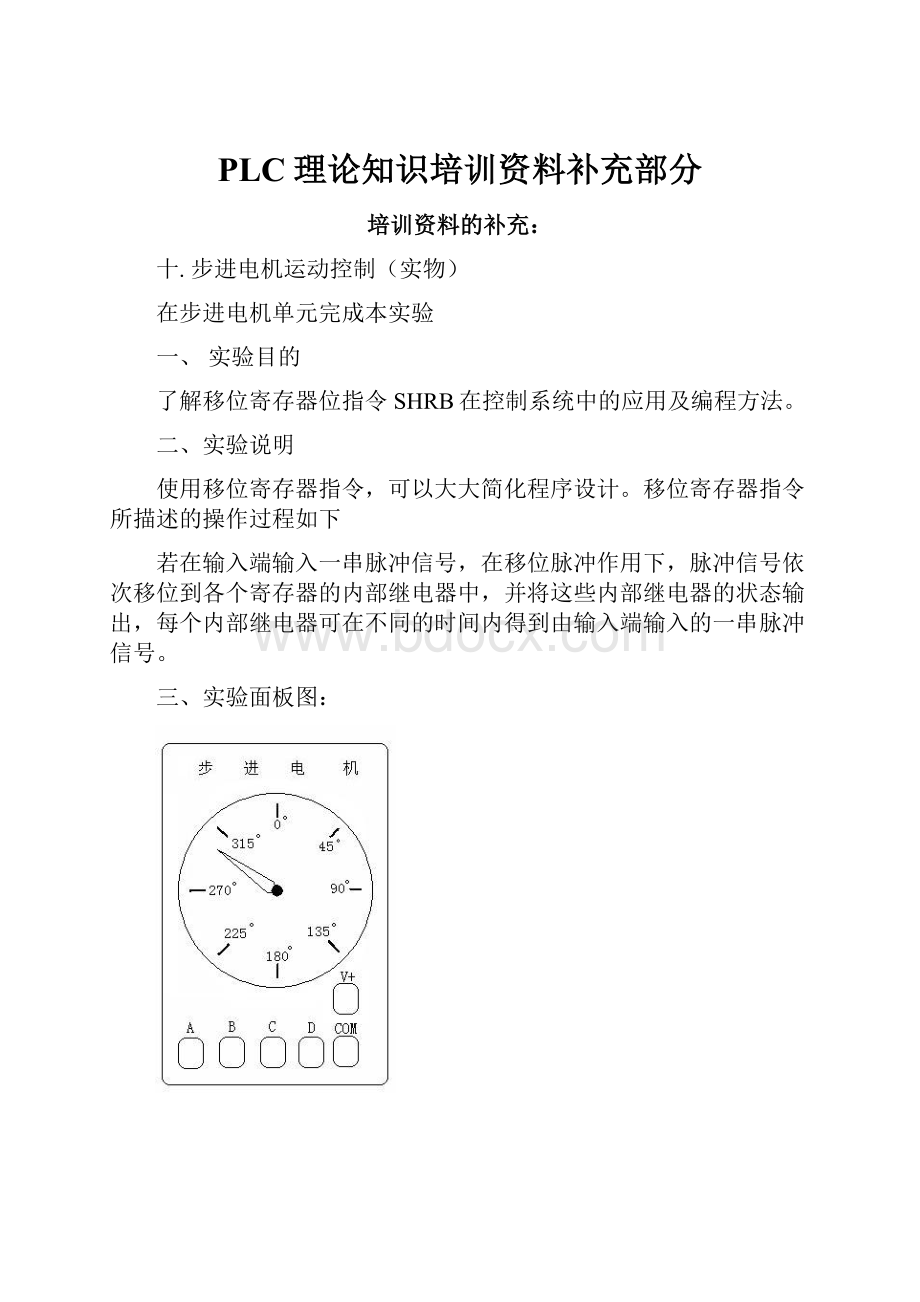
十.步进电机运动控制(实物)
在步进电机单元完成本实验
一、实验目的
了解移位寄存器位指令SHRB在控制系统中的应用及编程方法。
二、实验说明
使用移位寄存器指令,可以大大简化程序设计。
移位寄存器指令所描述的操作过程如下
若在输入端输入一串脉冲信号,在移位脉冲作用下,脉冲信号依次移位到各个寄存器的内部继电器中,并将这些内部继电器的状态输出,每个内部继电器可在不同的时间内得到由输入端输入的一串脉冲信号。
三、实验面板图:
四、实验步骤
1、输入输出接线
输入
SD
I0.0
输出
A
B
C
D
Q0.0
Q0.1
Q0.2
Q0.3
(启动开关与LED数码显示的共用)
2、打开主机电源将程序下载到主机中。
3、启动并运行程序观察实验现象。
五、梯形图参考程序
用非移位指令编写该程序:
假如步进电机的角位移为8度.要求电机转240度停下来5S,依次循环.
十一温度PID实验(实物)
在温度控制单元完成实验
一、实验目的
熟悉使用西门子S7-200系列PLC的PID控制,通过对实例的模拟,熟练地掌握PLC控制的流程和程序调试。
二、实验说明
(1)本实验说明
本实验的给定值(目标值)可以预先设定后直接输入到回路中;过程变量由在受热体中的Pt100测量并经温度变送器给出,为单极性电压模拟量;输出值是送至加热器的电压,其允许变化范围为最大值的0%至100%。
(2)理解S7系列的PID功能指令
PID循环(PID)指令根据表格(TBL)中的输入和配置信息对引用LOOP执行PID循环计算。
提供PID循环指令(成比例、整数、导出循环)进行PID计算。
逻辑堆栈(TOS)顶值必须是“打开”(功率流)状态,才能启用PID计算。
本指令有两个操作数:
表示循环表起始地址的TBL地址和0至7常量的“循环”号码。
程序中可使用八条PID指令。
如果两条或多条PID指令使用相同的循环号码(即使它们的表格地址不同),PID计算会互相干扰,结果难以预料。
循环表存储九个参数,用于控制和监控循环运算,包括程序变量、设置点、输出、增益、样本时间、整数时间(重设)、导出时间(速率)以及整数和(偏差)的当前值及先前值。
如果循环表起始地址或指令中指定的PID循环号码操作数超出范围,CPU编译器将生成一则错误(范围错误),编译将会失败。
PID指令不对某些循环表输入值进行范围检查。
您必须保证程序变量和设置点(以及作为输入的偏差和先前程序变量)是0.0和1.0之间的实数。
如果进行PID计算的数学运算时遇到错误,将设置SM1.1(溢出或非法数值)并终止PID指令的执行。
(对循环表中的输出数值的更新可能不完整,因此您应当忽略这些数值,并在执行下一个循环PID指令之前纠正引起数学错误的输入值。
)
在PID指令框中输入的表格(TBL)起始地址为循环表分配三十六(36)个字节。
偏移量
域
格式
类型
说明
0
PVn
进程变量
双字-实数
入
包含进程变量,必须在0.0至1.0范围内。
4
SPn
定点
双字-实数
入
包含定点,必须在0.0至1.0范围内。
8
Mn
输出
双字-实数
入/出
包含计算输出,在0.0至1.0范围内
12
Kc
增益
双字-实数
入
包含增益,此为比例常量,可为正数或负数。
16
Ts
样本时间
双字-实数
入
包含样本时间,以秒为单位,必须为正数。
20
Ti
积分时间或重设
双字-实数
入
包含积分时间或重设,以分钟为单位,必须为正数。
24
Td
微分时间或速率
双字-实数
入
包含微分时间或速率,以分钟为单位,必须为正数。
28
Mx
偏差
双字-实数
入/出
包含0.0和1.0之间的偏差或积分和数值。
32
PVn-1
以前的进程变量
双字-实数
入/出
包含最后一次执行PID指令存储的进程变量以前的数值。
在P,I,D这三种控制作用中,比例部分与误差部分信号在时间上时一致的,只要误差一出现,比例部分就能及时地产生与误差成正比例的调节作用,具有调节及时的特点。
比例系数越大,比例调节作用越强,系统的稳态精度越高;但是对于大多数的系统来说,比例系数过大,会使系统的输出振荡加剧,稳定性降低。
调节器中的积分作用与当前误差的大小和误差的历史情况都有关系,只要误差不为零,控制器的输出就会因积分作用而不断变化,一直要到误差消失,系统处于稳定状态时,积分部分才不再变化,因此,积分部分可以消除稳态误差,提高控制精度。
但是积分作用的动作缓慢,可能给系统的动态稳定性代来不良影响,因此很少单独使用。
积分时间常数增大时,积分作用减弱,系统的动态性能(稳定性)可能有所改善,但是,消除稳态误差的速度减慢。
根据误差变化的速度(即误差的微分),微分部分提前给出较大的调节作用,微分部分反映了系统变化的趋势,它较比例调节更为及时,所以微分部分具有预测的特点。
微分时间常数增大时,超调量减小,动态性能得到改善,但抑制高频干扰的能力下降。
如果微分时间常数过大,系统输出量在接近稳态值时上升缓慢。
采样时间按常规来说应越小越好,但是时间间隔过小时,会增加CPU的工作量,相邻两次采样的差值几乎没有什么变化,所以也不易将此时间取的过小,另外,假如此项取比运算时间短的时间数值,则系统无法执行。
三、实验步骤
1、输入输出接线
2、打开主机电源将程序下载到主机中。
3、启动并运行程序观察实验现象。
四、梯形图参考程序
MAIN
SBR_0
INT_0
把结果直接输出:
把结果经过处理再输出:
五、注意事项
1、不要把实验目标值设置过高,以免损坏实验装置。
一般设置为高于室温10~20℃即可。
2、由于季节或气温的影响,如果在不同的时间和环境内使用同一种参数做此实验,则可能造成控制效果的优劣差异。
为了弥补这方面的差异,也为了达到更好的控制目的,请在不同的时间和环境下设置更佳的P、I、D参数。
3、在实验的过程中,由于硬件及其他原因,系统温度与系统输出电压之间可能存在一定的误差,因此,为了更好的控制系统温度,目标值的设定应遵循以下步骤:
先把中断程序中的目标值MD104设定为较大的数值,启动系统加热,进入监控模式。
当系统温度上升到预期所要达到的温度值时,读取子程序中网络1中的MD100中的数值,此数值即为预期目标值,把此值填入中断程序中的目标值MD104中,再次下载程序,从新启动PID控制即可。
[关于程序讲解部分,暂且讲以上内容。
至于在平时的调试中的内容可以根据平时的一些实验程序再加以分析。
]
第五课时:
讲解电气控制基本常识
常用电气图形符号:
(国标)
常见的几个线路:
1全压启动控制线路
2.正反转控制线路:
(SB1正转启动
SB2反转
SB3停止)
3.星三角降压启动控制线路:
一般4KW以上的电动机要采用降压启动。
因为降压启动的电压是额定电压的。
从而减小电流对电网的影响。
星型启动的电流为三角形接法的。
星三角降压启动控制线路适合于电动机空载或轻载启动场合。
 升级会员
升级会员 