川大学控制系统CAD设计cad次实验报告.docx
《川大学控制系统CAD设计cad次实验报告.docx》由会员分享,可在线阅读,更多相关《川大学控制系统CAD设计cad次实验报告.docx(20页珍藏版)》请在冰豆网上搜索。
川大学控制系统CAD设计cad次实验报告
控制系统CAD设计
实验报告
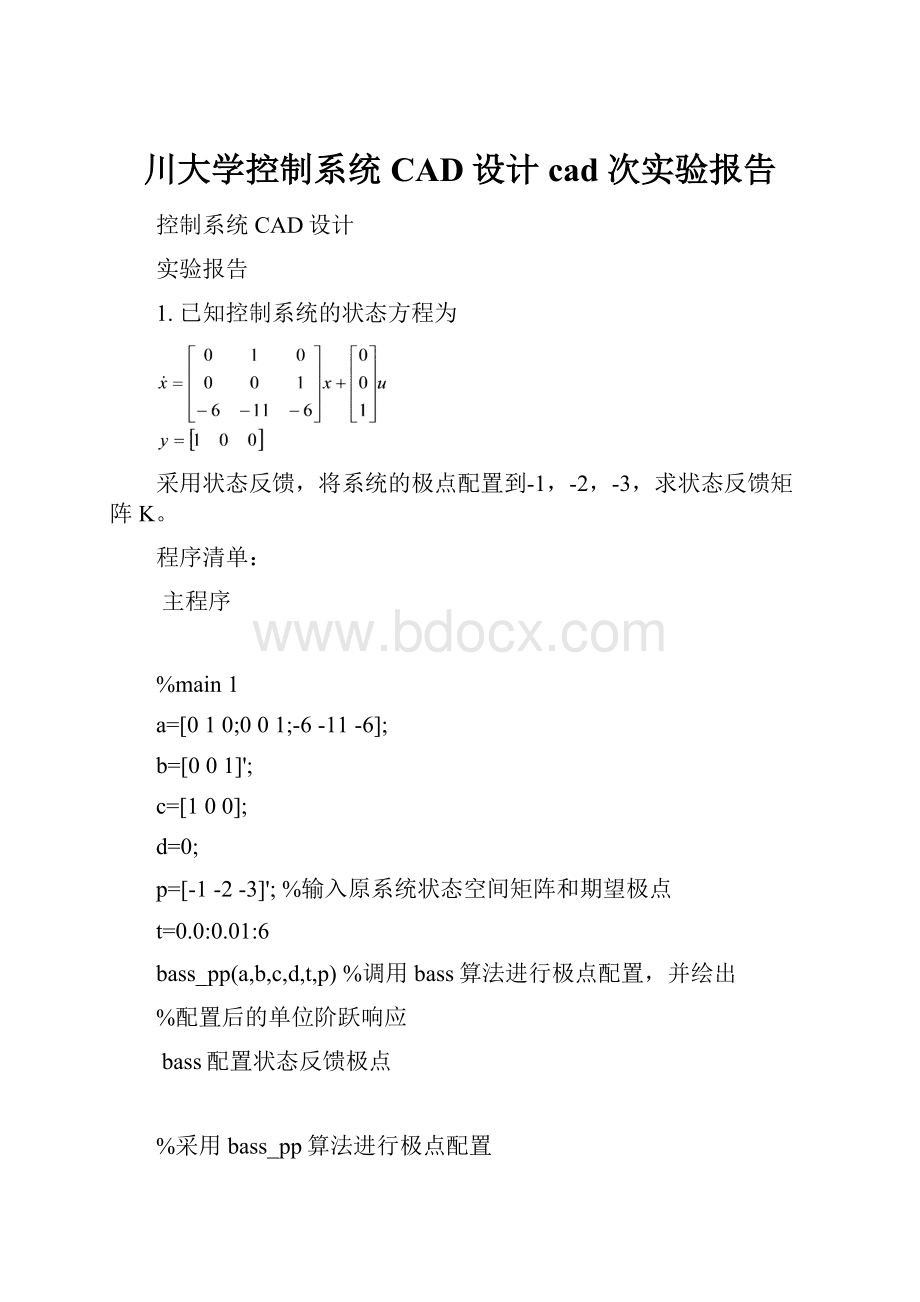
1.已知控制系统的状态方程为
采用状态反馈,将系统的极点配置到-1,-2,-3,求状态反馈矩阵K。
程序清单:
主程序
%main1
a=[010;001;-6-11-6];
b=[001]';
c=[100];
d=0;
p=[-1-2-3]';%输入原系统状态空间矩阵和期望极点
t=0.0:
0.01:
6
bass_pp(a,b,c,d,t,p)%调用bass算法进行极点配置,并绘出
%配置后的单位阶跃响应
bass配置状态反馈极点
%采用bass_pp算法进行极点配置
functionk=bass_pp(A,b,c,d,t,p)%t是用于绘制单位阶跃响应的步长
ifrank(ctrb(A,b))~=length(b),disp('No!
!
!
'),%进行系统的可控性判别,
%只对可控的额系统进行极点配置
else
n=length(b);%得到系统的状态数
alpha=poly(diag(p',0));%构成期望的系统特征多项式
a=poly(A);%系统原有的特征多项式
aa=[a(n:
-1:
2),1];%将特征多项式的各阶系数按降次排列
W=hankel(aa);%建立用于第二可控规范型变换的hankel矩阵,
M=ctrb(A,b);%建立原系统能控型判别矩阵,和M矩阵一起合成对角变换阵
k=(alpha(n+1:
-1:
2)-a(n+1:
-1:
2))*inv(W)*inv(M);
%求解反馈增益矩阵,
sysnew=ss((A-b*k),b,c,d);
sysnew_cl=feedback(sysnew,1);
step(sysnew_cl,t),holdon,gridon
end
End
运行结果(配置后的闭环系统和状态反馈矩阵):
sysnew_cl=
a=
x1x2x3
x1010
x2001
x3-7-11-6
b=
u1
x10
x20
x31
c=
x1x2x3
y1100
d=
u1
y10
Continuous-timestate-spacemodel.
ans=
1.0e-14*
-0.7994-0.5329-0.1776
可以看到,配置状态反馈所用的K矩阵值几乎为0,这主要期望极点-1,-2,-3就是系统本身的极点,系统不需要进行极点配置所致。
2.已知控制系统的状态方程为
设计全维状态观测器,将观测器极点配置到
。
利用对偶原理,可以将状态观测器的极点配置转化为状态反馈的极点配置
程序清单:
主程序
****************************************************************
%4_3调用函数
a=[010;001;-6-11-6];
b=[001]';
c=[100];
d=0;
p1=[-3+2*sqrt(3)-3-2*sqrt(3)-5]';%观测器期望极点
l=place(a',c',p1)',%由对偶原理求出观测器反馈矩阵
eig(a-l*c)'%极点配置后的特征值
[xh,x,t]=simobsv(a,b,c,d,l)%返回重构状态和受控状态的阶跃响应矩阵
****************************************************************
%全维观测器状态
function[xh,x,t]=simobsv(A,B,C,D,L)
G=ss(A,B,C,D);
[y,t,x]=step(G);%原系统的闭环阶跃响应
[y1,xh1]=step((A-L*C),B,C,D,1,t);
[y2,xh2]=lsim((A-L*C),L,C,D,y,t);
xh=xh1+xh2;
plot(t,x,'-',t,xh,':
');gridon;
运行结果:
l=;状态反馈矩阵H
5.0000
-14.0000
8.0000
ans=;配置后状态矩阵A-HC的特征值
0.4641-6.4641-5.0000
可以看到,重构状态和原状态响应基本上相同的,实际中只需要重构状态在允许时间收敛到原状态,考虑到状态观测器存在模型失配等问题,理想的重构状态是难以实现的。
3.已知控制系统的状态方程为
a)采用状态反馈,将系统的极点配置到-1,-2,-3,求状态反馈矩阵K。
假设该系统的状态不可测量,同时设计全维状态观测器,将观测器极点配置到
。
b)写出带有观测器下的6阶闭环系统的状态空间模型,判断此系统的可控和可观性,求此时系统的传递函数数学模型,并与不带观测器下系统闭环传递函数进行对比。
c)对带与不带观测器下闭环系统单位阶跃响应的y与x的曲线进行对比。
注:
前者为6阶系统后者为3阶系统。
程序清单:
%4_4调用程序
a=[010;001;-6-11-6];
b=[001]';
c=[100];
d=0;
p=[-1-2-3]';%输入原系统状态空间矩阵和期望极点
t=0.0:
0.01:
6;
k=place(a,b,p)%调用bass算法进行极点配置,并绘出
%配置后的单位阶跃响应
p1=[-3+2*sqrt(3)-3-2*sqrt(3)-5]';%观测器期望极点
l=place(a',c',p1)',%由对偶原理求出观测器反馈矩阵
a1=cat(2,a-b*k,b*k),
a2=cat(2,zeros(size(a-b*k)),a-l*c),%构造带状态反馈观测器的负反馈
AA=cat(1,a1,a2)
BB=cat(1,b,[0;0;0])
CC=cat(2,c,[0,0,0])
DD=0%拼接出带状态观测器的负反馈
rank_c=rank(ctrb(AA,BB))
rank_o=rank(ctrb(AA',CC'))
ifrank_c==3&rank_o==3
disp('系统完全可控可观测')
end%对带状态观测器的负反馈进行可控可观性判别
[xh,x,t]=simobsv(a,b,c,d,l)
sys0=ss(a,b,c,d);
sys0_cl=feedback(sys0,1);
sys1=ss(AA,BB,CC,DD);
sys1_cl=feedback(sys1,1);%产生原系统和状态反馈后
%的闭环传函
step(sys0_cl,t),holdon,gridon
step(sys1_cl,t),%绘制单位阶跃响应
tf(sys0_cl),
tf(sys1_cl)
运行结果:
AA=
01.00000000
001.0000000
-6.0000-11.0000-6.0000000
000-5.00001.00000
00014.000001.0000
-0.0000-0.00000.0000-14.0000-11.0000-6.0000
BB=
0
0
1
0
0
0
CC=
100000
DD=
0
rankQc=
3
rankQo=
3
系统完全可控可观测
ans=
1
----------------------
s^3+6s^2+11s+7
Continuous-timetransferfunction.
ans=
1
----------------------
s^3+6s^2+11s+7
4.试编写m文件,绘制零初始条件下下列系统的单位阶跃响应曲线。
具体要求。
(1)K=1,T=[0.001:
0.1:
4]秒;
T=0.5秒,K=[0.5:
1:
20]。
(2)构建下列系统的simulink模型,并对虚线内的子系统进行封装,讨论采样周期和开环增益对系统稳定性的影响。
(1)程序清单:
%绘制零初始条件下系统的单位阶跃响应
k=1;%开环增益K为1时
holdon
forT=0.001:
0.1:
4
%改变采样周期得到一组阶跃响应
g0=tf([k],conv([1,0],[1,1]));
%不带零阶保持器的开环传递函数
g0=c2d(g0,T);%将连续系统离散化
g1=feedback(g0,1);
step(g1);%得到输入输出脉冲传递函数阶跃响应
end
holdoff
figure%重新建立一个绘图窗口
holdon
T=0.5
fork=0.5:
1:
20
%改变开环增益,其他过程和上一个循环相同
g0=tf(k,conv([1,0],[1,1]));
g0=c2d(g0,T);
g1=feedback(g0,1);
step(g1);
End
运行结果
执行过程非常耗时间
改变采样周期单位阶跃响应的变化:
可以看到,采样周期偏大时,响应的振幅和超调会增加,这也就说明了采样周期的存在会降低系统的稳定性。
改变开环增益后的单位阶跃响应变化
可以看到,随着开环增益的增大,在0.5s采样周期下的信号会迅速趋于发散。
(2)
采样周期对系统稳定性的影响(增益固定为1)
采样周期0.1s(20s)采样周期0.2s(20s)
采样周期0.5s(100s)采样周期1s(100s)
采样周期2s(100s)采样周期3s(100s)
采样周期10s(200s)
随着采样周期的增长,最终系统总会趋于不稳定,采样周期在一定范围内增加会增加响应的滞后,超调,使输出刻画连续系统响应的能力下降。
开环增益对系统稳定性的影响(固定采样周期为1s)
开环增益为3(1000s)开环增益2.364s(1000s)
开环增益2s(200)开环增益1.2s(200s)
开环增益1s(50s)开环增益0.2s(50s)
开环增益过大,系统最终不稳定,2.634为临界稳定的开环增益,随着开环增益的减小,系统的超调量,振荡减小,最后变为非周期增长的稳定系统,这和连续系统是一致的,只是连续系统离散化后稳定域大大减小,减小的程度与系统的阶次和所用的采样周期有关。
4.已知含有非线性环节的控制系统如图所示。
完成下列仿真。
(1)非线性环节特性如图a所示。
通过构造mdl模型或编写m文件,仿真对比非线性环节对系统特性的影响(稳定性,暂态以及稳态三方面),绘制有无非线性环节两种条件下系统单位阶跃响应曲线。
参考教材p285。
(2)非线性环节特性如图b所示。
通过仿真对比非线性环节参数m与h对系统特性的影响(稳定性,暂态以及稳态三方面)。
当m=1,h=0.5时,绘制零初始条件下,该系统单位阶跃响应的相轨迹图。
[t,x,y]=sim('m5_2',10);
plot(y(:
1),y(:
2));
(3)非线性环节特性如图c所示。
通过仿真对比非线性环节参数h对系统特性的影响(稳定性,暂态以及稳态三方面)。
当h=0.5时,绘制系统初始条件
时该系统的相轨迹图。
(1)死区对系统的影响(单位阶跃响应)
滞环(开关线-1,1,输出-1,+1)对系统的影响(单位阶跃响应)
饱和(-0.1,+0.1)对系统的影响(单位阶跃响应)
(2)
(3)c=3
可以看到,零初始条件下和初始输出为3时的相轨迹都收敛
(+1--1)处的极限环。
 升级会员
升级会员 