中国农业大学网络教育自动控制原理作业.docx
《中国农业大学网络教育自动控制原理作业.docx》由会员分享,可在线阅读,更多相关《中国农业大学网络教育自动控制原理作业.docx(28页珍藏版)》请在冰豆网上搜索。
中国农业大学网络教育自动控制原理作业
中国农业大学网络教育--自动控制原理(作业)
第1套
您已经通过该套作业,请参看正确答案
1、在()的情况下应尽量采用开环控制系统
A系统的扰动量可以预计并能进行补偿
B.系统的扰动量大且无法预计
C.闭环系统不稳定
D.以上都不对
参考答案:
A您的答案:
A
2、数学模型()不能用来描述线性动态系统
A微分方程组
B.传递函数
C一个代数方程
D.一个高阶微分方程
参考答案:
C您的答案:
C
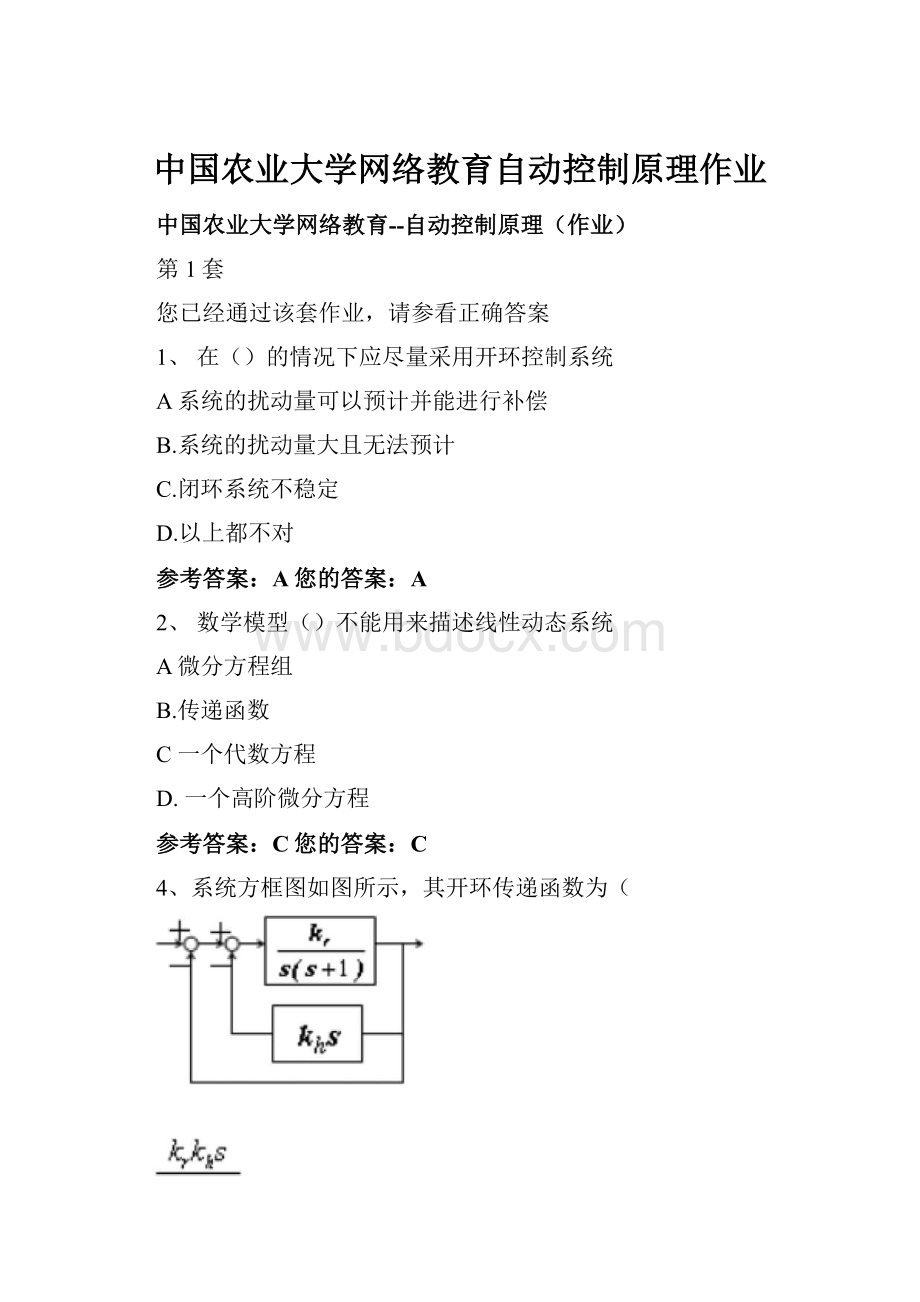
4、系统方框图如图所示,其开环传递函数为(
B.'■--
DUh
参考答案:
D您的答案:
D
4、系统方框图如图所示,其输出Y为()
&13(凤+禺)
A1+0兄+&心凤(?
屈+&屈
B.
C「
D:
参考答案:
C您的答案:
C
)在s复平面上的位置
5、系统的暂态响应的基本特征取决于系统(
A开环极点和开环零点
B.闭环极点和闭环零点
C开环极点和闭环极点
D.闭环极点和开环零点
参考答案:
B您的答案:
B
16
6、单位负反馈控制系统的开环传递函数为:
」*',其暂态性能指标为()
A调整时间约1.5秒(2%误差)、上升时间约0.9秒、过调量约16.3%
B.调整时间约0.9秒(2%误差)、上升时间约0.6秒、过调量约3.46%
C调整时间约2.2秒(2%误差)、上升时间约0.6秒、过调量约16.3%
D.调整时间约2.2秒(2%误差)、上升时间约0.9秒、过调量约3.46%
参考答案:
C您的答案:
C
7、已知系统框图中N为阶跃干扰信号,()系统对于消除或减小扰动误差更好
参考答案:
B您的答案:
B
8、()高阶系统可以近似为低阶系统
s+2
A.i—
/+2$+2.81
B上_lT一:
「’|
54-7
C:
一[一-一:
F+0-2s+2,81
参考答案:
D您的答案:
D
A稳定的
B.临界稳定的
C不稳定的
D.条件稳定的
参考答案:
B您的答案:
B
参考答案:
A您的答案:
A
B.二
kl(s2+2s+2)
C:
<1-■-1
岸(百+1)@+2)
D.j'■■-
参考答案:
B您的答案:
B
12、下列说法正确的是()
A频率特性是指系统在正弦输入信号作用下系统输出与输入之比
B.系统的频率特性包括幅频特性和相频特性它们都与频率3无关
C频率特性反映系统或环节对不同频率正弦输入信号的放大倍数和相移
D.以上都不正确
参考答案:
C您的答案:
C
13、某系统的开环传递函数在右半s平面内的极点数为P,当s沿奈魁斯特围线转
一圈时,其奈魁斯特图绕(-1,j0)点N圈,则下列说法正确的是()
A若N=0则系统是稳定的
B.若N=P则系统是稳定的
C若N<0则系统必为不稳定
D.若N=—P则系统是稳定的
参考答案:
D您的答案:
D
14、已知最小相位系统的渐近幅频特性如图所示,系统的开环传递函数为()
A-I1
□(£+1(10)
B.二
C■'■I■"
s+100
D.■1■'<1
参考答案:
A您的答案:
A
15、串联超前校正可用于()的情况
A对数幅频特性低频段位置过低时
B.当系统根轨迹通过期望主导极点,但在期望主导极点不能满足静态品质指标时
C当期望闭环主导极点位于未校正系统根轨迹的左边时
D.当相位裕量满足系统要求时
参考答案:
C您的答案:
C
第2套
您已经通过该套作业,请参看正确答案
1、控制器加工处理一定的信息,产生()作用到被控制对象上,产生所需要的被控
制量。
A测量量
B.控制量
C反馈量
D.扰动量
参考答案:
B您的答案:
B
2、对于线性定常系统,在()条件下系统输出量的拉氏变换与引起该输出的输入量
拉氏变换之比,称为系统的传递函数。
A零输入
B.零响应
C零初始状态
D.零时刻
参考答案:
C您的答案:
C
3、系统方框图如图所示,其闭环传递函数为(
A门】'
B.'iI厂々:
I匚
孙(妬s+1)
C
k尹
D.
参考答案:
B您的答案:
B
4、系统方框图如图所示,其输出Y为()
^^9~'[G|]'G2—
~SW——1
R:
A禺禺)
'l+G^+GjGjZfj
1+鸟尽+0^禺
亡+&局)
1+巳兄+$目禺
G1G2R1-R2Hl
l+G/^+G]鼻禺
参考答案:
A您的答案:
A
5、系统的暂态响应的主要特征取决于系统()在s复平面上的位置
A.偶极子
B•闭环极点和开环极点
C.闭环主导极点
D.以上都不是
参考答案:
C您的答案:
C
6、单位反馈二阶系统,已知其开环传递函数为法求得其零初始状态下的阶跃响应的超调量递函数中的参量…■,-为()
Xi=0.69,^=2.17
B^=035,^=1.28C-4=09,码!
=3-11
D.占=069,耳=1.28
参考答案:
A您的答案:
A
/s(s+5),G(s)=1/(O.ls+1)。
AO,0,0
B.20,2,0
C.a,2,0
D.a,20,2
参考答案:
C您的答案:
C
)组合而成
8、高阶系统时域单位阶跃响应是由稳态响应和(
A衰减响应
B.不衰减响应
C极点模态、零点模态
D.一阶模态、二阶模态
参考答案:
D您的答案:
D
9、已知系统劳斯表如图,则系统在右半s平面的特征根数为(
)
S51
0—1
S42
0—2
S'0
0
(8>
(0)
S-0
(c>
S1)6/£
S-2
A1个
B.2个
C3个
D.4个
一2
参考答案:
A
您的答案:
A
10、根轨迹上任意一点si的根轨迹增益Kr值的计算公式为()
A.
从Gh)ll(s)备极点到勺的向氏度之枳
从G⑸垃打存耳点到勺的向皋悅度之枳
B.
点到巧的向吊K悭之积
K厂
一P、G⑻H辭扱点于h的向虽长度之积
Kr
从14■&彻各零点到Q的向虽氏度Z积
c.
-从1-G(s/H(s)备极点到曲的向暈氏度Z枳
D.
Kt.
从1+G(計H牯)各极点到吊的向虽氏度Z积
从l^G(s)Hh)fr零点到我的向S长度之枳
参考答案:
A您的答案:
A
11、开环传递函数为以二"的系统的根轨迹为()
A
参考答案:
B您的答案:
B
12、下列说法正确的是()。
A对数频率特性的正频与负频部分关于3轴对称
B.逆因子的对数频率特性关于实轴对称
C频率特性极坐标图的正频与负频部分关于实轴对称
D.以上都不正确
参考答案:
C您的答案:
C
100
以上都不是
0
-4IMBI
10
+1)(105+1)
X2s+1)(15+1)
B±
s(05S+1)(015+1)
参考答案:
A您的答案:
A
c-10
5(0.35+1)(0.15+1)
)0
14、单位负反馈系统的开环对数幅频特性如图所示,系统的开环传递函数为
13、某系统的开环频率特性为其极坐标图是()o
参考答案:
B您的答案:
B
15、下列串联校正环节中属于滞后校正的是,
()。
5sA.
B.C.
1+0.Is
D&十100)0十005)
1+%
1+0.4^
1+0.55
100+10)3+0®
参考答案:
C您的答案:
C
第3套
您已经通过该套作业,请参看正确答案
1、闭环控制系统的特征是()
A针对扰动进行补偿
B.具有很高的控制速度
C带有负反馈的按偏差控制
D.以上都不对
参考答案:
C您的答案:
C
)的图解表示
2、动态结构图(方框图)是系统原理图与数学方程的结合,是(
A线性代数方程组
B.微分方程组
C复变函数
D.以上都不是
参考答案:
A您的答案:
A
3、系统方框图如图所示,其闭环传递函数为:
(
'1+GM
q(G】+6)
曲B率i+GjGji+g+qq
CZD曲
1+6+曲1+G】+g
参考答案:
B您的答案:
B
4、系统方框图如图所示,其传递函数为(
参考答案:
C您的答案:
5、增加系统的闭环极点,其作用相当于()
A增大阻尼比
B.减小阻尼比
C将阻尼比置为0
D.阻尼比置为无穷大
参考答案:
A您的答案:
A
6、已知某单位反馈系统的单位阶跃响应为7:
'-1,则传递
函数中的参量L'为()
A.^=08,吗!
=6,%=10
B.£-0.S,码—10,购二6
C.=0.5>叫二10,=8
D.£二0.&=10,=3
参考答案:
B您的答案:
B
0^=-^―?
6^=—^―
7、系统方框图如图所示,R(s)=1/s,N(s)=1/s,'''',系统的稳
态误差是()
v|
A.B.OUD
孑+K?
+瓷2+七
参考答案:
C您的答案:
C
10
8、某系统闭环传递函数为:
・-:
亠」:
-…,单位阶跃响应近似为:
()
A>©=1+1■16«41siti(0.866£+ff)
By(£)=10-ll.6e-°Jfsin(0.866i十&)
C.j(0=10+lt创4an(0.866t+^
D.y(i)=1-1.16^"°^sin(0.866;+9)
参考答案:
D您的答案:
D
9、已知系统闭环特征方程为S3+9《+18S+18K=0若需使所有闭环特征根的实部均小于-1,则可设(),然后重排劳斯表即可求出K的取值范围。
AS=Z+1
B.S=Z—1
CS=Z2—1
D.N+1
参考答案:
B您的答案:
B
A1
B.2
C3
D.4
参考答案:
D您的答案:
D
kr(F+2)
11、开环传递函数为的系统的根轨迹上,出射角为()
A—143.4
B.—26.2°
C—116.6
D.—100°
参考答案:
C您的答案:
C
12、当系统增设比例环节后下列说法正确的是()
A系统的L(3)平移
B.系统的L(3)改变形状
C系统的0(3)平移
D.系统的0(3)改变形状
参考答案:
A您的答案:
A
参考答案:
B您的答案:
B
14、已知某负反馈最小相位系统的开环对数幅频特性如图所示,系统的相角裕度(
C214°左右
D.146°左右
参考答案:
B您的答案:
B
10
15、已知某单位负反馈系统的开环传递函数为-:
2;-',若要求闭环主导极
点到虚轴的距离不小于4,则可采用串联校正环节()。
A基于根轨迹的超前校正
B.基于Bode图的超前校正
C.基于Bode图的滞后校正
D.基于根轨迹的滞后校正
参考答案:
A您的答案:
A
第4套
您已经通过该套作业,请参看正确答案
1、自动控制系统的()是系统工作的必要条件。
A稳定性
B.动态特性
C稳态特性
D.不稳定性
参考答案:
A您的答案:
A
2、结构图的变换(或简化)目的是为了得到系统的传递函数,对某一封闭域变换前后输入输出关系()。
A与代数运算结果不同
B.由代数关系变为导数关系
C不发生变化
D.发生变化
参考答案:
C您的答案:
C
3、系统方框图如图所示,其输入端R到误差E的传递函数为()。
G:
|
L
j+曲1+禺+曲
CFDR
i+q+曲i+g+曲
参考答案:
D您的答案:
D
4、系统方框图如图所示,其传递函数为()
参考答案:
D您的答案:
D
5、一阶系统暂态响应的特征是()。
A调整时间3T、上升时间4T、过调量1/T
B.调整时间4T、上升时间3T左右、无过调现象
C调整时间3T、上升时间无过调现象
D.调整时间3T、上升时间1T、无过调现象
参考答案:
B您的答案:
B
6、已知某欠阻尼单位反馈系统,其单位阶跃响应为(
参考答案:
C您的答案:
C
7、已知系统如图,扰动输入时引起的误差传递函数为(
瓦6
c爭
1+&1牡
参考答案:
A您的答案:
A
5Cs+056)
2'j-yi_
8、某系统闭环传递函数为:
"''"1,其中对应的留数最小的闭环极点是()。
A.s=—10B.s=—05C.s=—1iB.s=—0.56
参考答案:
B您的答案:
B
9、已知系统闭环特征方程为2S5+S4+6W+3S2+S+仁0,此系统是()。
A稳定性
B.不稳定,有一个正实部根
C不稳定,有二个正实部根
D.无法判断
参考答案:
C您的答案:
C
10、实轴上根轨迹右边的开环实极点与实零点的个数和为()
A奇数
B.偶数
C任意数
D.虚数
参考答案:
A您的答案:
A
k+2)
11、开环传递函数为
;1的系统的根轨迹与虚轴的交点为()
A±2.6
B.±1.6
C±0.6
D.±3.6
参考答案:
B您的答案:
B
12、Bode图与Nyquist图的对应关系为()
ANyquist图上的单位园B.Nyquist图上的单位园CNyquist图上的负实轴D.Nyquist图上的负实轴对应Bode图上的一180°线
对应Bode图上的0dB线
对应Bode图上的0dB线
对应Bode图上的一180°线
参考答案:
D您的答案:
D
13、某最小相位系统的Nyquist图如图所示,则其相位裕量和幅值裕量标注正确的是
)0
10
o
14、系统的开环传递函数为…—1:
1--「,其Bode图为()
B.
Q
CJ
O'
c
*!
>(
1;洞
9
我㈣
化(3)加日
D以上都不对
参考答案:
B您的答案:
B
L(3)闭日—>(:
]
卩d日
D以上都不是
参考答案:
A您的答案:
A
15、某单位负反馈系统的开环传递函数为
G{x)
100
量为-15°,现要求相位裕量大于40°,则可采用串联校正环节(
A基于根轨迹的超前校正
B.基于Bode图的超前校正
C基于Bode图的滞后校正
D.基于根轨迹的滞后校正
已知其相位裕
)0
参考答案:
B您的答案:
B
 升级会员
升级会员 