变位齿轮设计.docx
《变位齿轮设计.docx》由会员分享,可在线阅读,更多相关《变位齿轮设计.docx(9页珍藏版)》请在冰豆网上搜索。
变位齿轮设计
齿轮机构及其设计>变位齿轮
变位齿轮的意义
(1)避免根切现象.切削z
(2)配凑中心距.一对齿轮在非标准中心距的情况下不仅均能安装,而且能满足侧隙为零、顶隙为标准值的要求;
(3)改善小齿轮的强度和传动啮合特性,能提高齿轮机构的承载能力。
(4)修复已磨损的旧齿轮
变位修正
用标准齿条形刀具加工齿轮时,改变刀具与轮坯的相对位置,使刀具的分度线与齿轮轮坯的分度圆不再相切而切制出的齿轮为变位修正齿轮,简称变位齿轮。
按刀具分度线与被加工齿轮分度圆的相对位置,可分为三种情况:
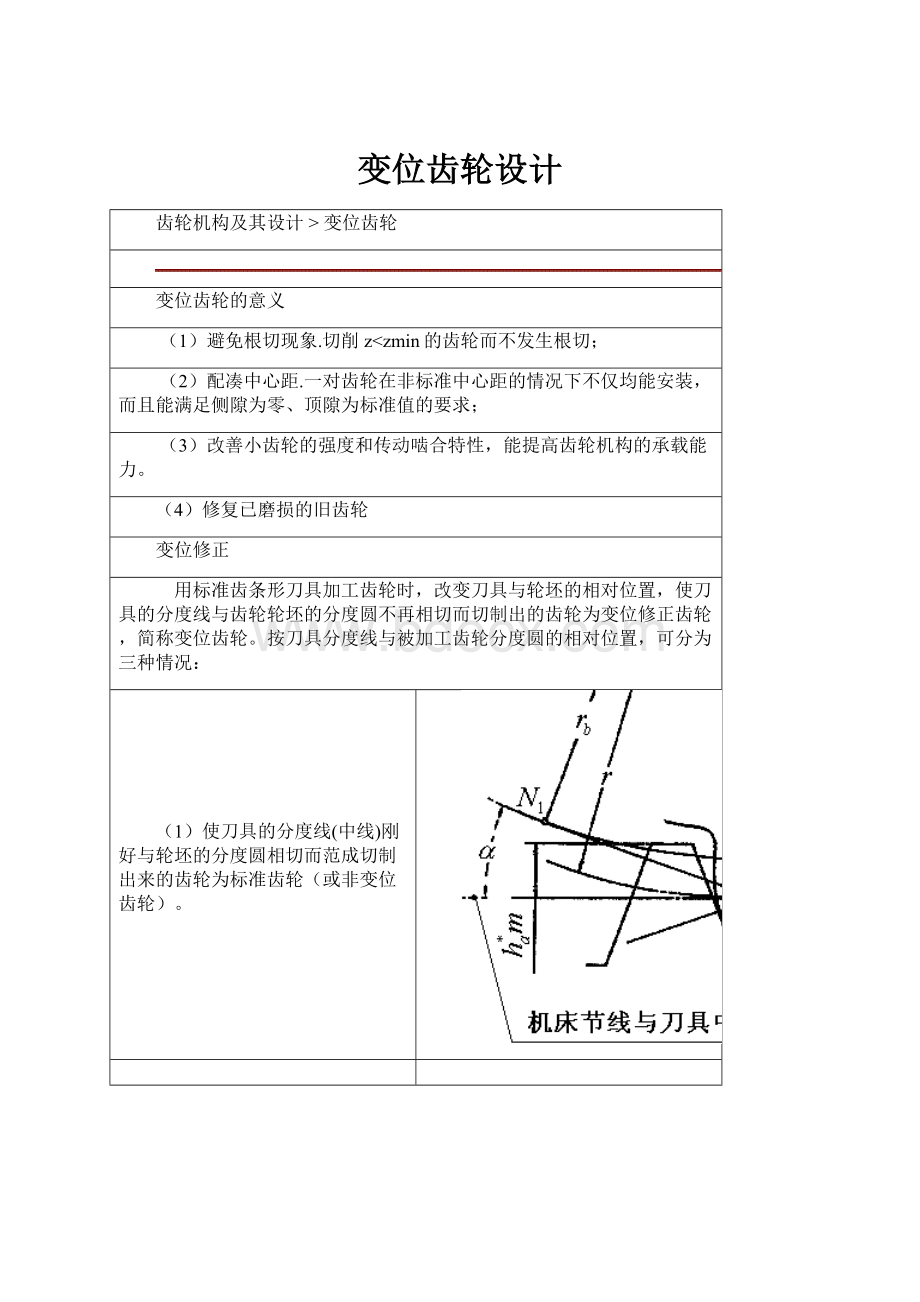
(1)使刀具的分度线(中线)刚好与轮坯的分度圆相切而范成切制出来的齿轮为标准齿轮(或非变位齿轮)。
(2)刀具的分度线(中线)与被加工齿轮分度圆相切位置远离轮坯中心一段径向距离xm(m为模数,x为径向变位系数,简称变位系数)。
这样加工出来的齿轮成为正变位齿轮。
xm>0,x>0。
(3)刀具的分度线靠近轮坯中心移动一段径向距离xm,刀具分度线与轮坯分度圆相割。
这样加工出来的齿轮称为负变位齿轮。
xm<0,x<0。
变位齿轮的基本参数和几何尺寸
基本参数:
比标准齿轮多了一个变位系数x
几何尺寸(与相同参数的标准齿轮的尺寸比较):
正变位
负变位
分度圆直径
不变
不变
基圆直径
不变
不变
齿顶圆直径
变大
变小
齿根圆直径
变大
变小
分度圆齿距
不变
不变
分度圆齿厚
变大
变小
分度圆齿槽宽
变小
变大
顶圆齿厚
变小
变大
根圆齿厚
变大
变小
无侧隙啮合方程
变位齿轮传动的中心距与啮合角
符合无侧隙啮合要求的变位齿轮传动的中心距a'是这样确定的:
(1)首先由无侧隙啮合方程求得啮合角α':
(2)再由
求得中心距a'
此中心距a'与标准中心距a之间的差值用ym表示(y称为中心距变动系数):
则
可推导得:
可见:
当x1+x2=0时,α'=α,a'=a
当x1+x2>0时,α'>α,a'>a
当xx1+x2<0时,α'<α,a'这说明,变位齿轮传动较标准齿轮传动的优点是:
只要采用适当的变位系数,不论是标准中心距还是非标准中心距,均能安装且满足无侧隙啮合要求.但要注意,在x1+x2<>0时,如果保证无侧隙安装,而且还要满足标准顶隙,则两轮的齿顶高应各减小
。
称为齿顶高降低系数,其值为:
这时,齿轮的齿顶高为:
变位齿轮传动类型及特点
(1)变位齿轮的传动类型
传动类型
标准齿轮传动(变位齿轮传动特例)
及
等变位齿轮传动(高度变位齿轮传动)
不等变位齿轮传动(角度变位齿轮传动)
正传动
负传动
(2)变位齿轮传动计算
名称
符号
标准齿轮传动
等变位齿轮传动
不等变位齿轮传动
变位系数
节圆直径
啮合角
齿顶高
齿根高
齿顶圆直径
齿根圆直径
中心距
中心距变动系数
齿顶高变动系数
(3)变位齿轮的传动特点
等变位齿轮传动
正传动
负传动
小齿轮正变位,大齿轮负变位,可达到等强度要求,充分发挥齿轮的承载能力.
两齿轮均采用正变位或小齿轮正变位,大齿轮负变位(负变位系数绝对值较小),均能提高齿轮机构的承载能力;
齿轮机构强度有所下降
小齿轮正变位,其齿数小于Zmin而不发生根切.
可用于实际中心距大于标准中心距的场合
可用于实际中心距小于标准中心距的场合
重合度减小较多
重合度略有增加
变位齿轮设计步骤
已知中心距的设计
已知变位系数的设计
已知:
已知:
step1:
确定啮合角
step1:
确定啮合角
step2:
确定变位系数和
step2:
确定中心距
step3:
确定中心距变动系数
step3:
确定中心距变动系数
step4:
确定齿顶高降低系数
step4:
确定齿顶高降低系数
step5:
分配变位系数
step5:
计算变位齿轮传动的几何尺寸
step6:
计算变位齿轮传动的几何尺寸
例题
已知一对变位齿轮,
要求确定x1,并计算两轮的齿根圆半径,齿顶圆半径和齿全高。
解:
设这一对齿轮为边准中心距安装,则中心距为:
因给中心距为121.5mm>120mm,故这对齿轮为正变位传动,其啮合角为:
=21.52度
按无侧隙啮合方程有:
按题意:
x2=0,所以x1=0.524,轮1与轮2的齿根圆半径,齿顶圆半径和齿全高分别为:
▲解法1:
齿顶圆半径:
齿全高:
▲解法2:
中心距变动系数:
齿顶高降低系数:
齿顶高:
齿根高:
齿全高:
(注:
专业文档是经验性极强的领域,无法思考和涵盖全面,素材和资料部分来自网络,供参考。
可复制、编制,期待你的好评与关注)
 升级会员
升级会员 