机器人B类轮式或履带式行走机器人竞赛规则.docx
《机器人B类轮式或履带式行走机器人竞赛规则.docx》由会员分享,可在线阅读,更多相关《机器人B类轮式或履带式行走机器人竞赛规则.docx(10页珍藏版)》请在冰豆网上搜索。
机器人B类轮式或履带式行走机器人竞赛规则
B类:
轮式或履带式行走机器人
1机器人界定
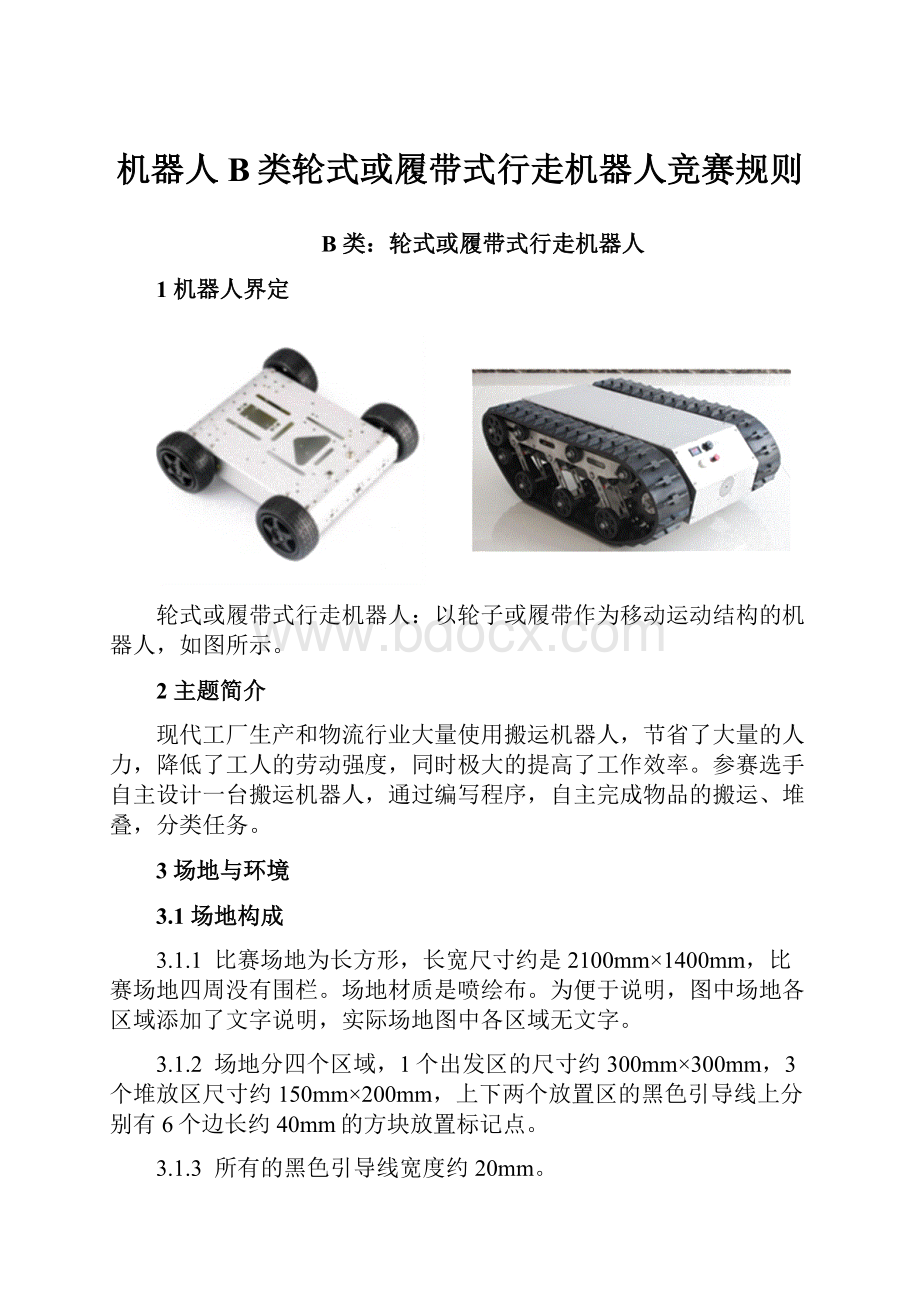
轮式或履带式行走机器人:
以轮子或履带作为移动运动结构的机器人,如图所示。
2主题简介
现代工厂生产和物流行业大量使用搬运机器人,节省了大量的人力,降低了工人的劳动强度,同时极大的提高了工作效率。
参赛选手自主设计一台搬运机器人,通过编写程序,自主完成物品的搬运、堆叠,分类任务。
3场地与环境
3.1场地构成
3.1.1比赛场地为长方形,长宽尺寸约是2100mm×1400mm,比赛场地四周没有围栏。
场地材质是喷绘布。
为便于说明,图中场地各区域添加了文字说明,实际场地图中各区域无文字。
3.1.2场地分四个区域,1个出发区的尺寸约300mm×300mm,3个堆放区尺寸约150mm×200mm,上下两个放置区的黑色引导线上分别有6个边长约40mm的方块放置标记点。
3.1.3所有的黑色引导线宽度约20mm。
各区域示意图
高中组抽签示意图
3.2赛场环境
机器人比赛场地环境为低照度。
由于一般赛场环境的不确定因素较多,例如:
场地纸不平整、地板上有裂缝、光照条件有变化等,参赛队在设计机器人时应考虑各种应对措施。
比赛场地尺寸的允许误差是±10mm,参赛队设计机器人时必须充分考虑。
3.3任务道具
方块:
棱长40mm的EVA材质立方体重约5(±1)克,有红、绿、蓝三种颜色若干个。
各组别编程调试前由裁判组指定人员抽取方块的颜色与初始位置,同时抽取不同颜色方块送至堆放区的位置。
3.4任务描述
3.4.1小学组:
要求机器人从放置区将6个方块(红、绿、蓝三种颜色各2个,调试前抽签决定摆放位置点)送至指定堆放区(调试前抽签决定),并在堆放区将同色的方块堆叠成“日”造型。
机器人在出发区启动,完成任务全程沿黑色引导线移动。
方块从搬运起始线至堆放区过程中,方块不得与地面接触。
机器人完成任务后回到出发区停止计时。
3.4.2初中组:
要求机器人从放置区将9个方块(红、绿、蓝三种颜色各3个,调试前抽签决定摆放位置点)送至指定堆放区(调试前抽签决定),并在堆放区将同色的方块堆叠成“品”造型。
机器人在出发区启动,完成任务全程沿黑色引导线移动。
方块从搬运起始线至堆放区过程中,方块不得与地面接触。
机器人完成任务后回到出发区停止计时。
3.4.3高中组:
要求机器人从放置区将12个方块(红、绿、蓝三种颜色各4个,调试前抽签决定摆放位置点)送至指定堆放区(调试前抽签决定),并在堆放区将同色的方块堆叠成“⊥”造型。
机器人在出发区启动,完成任务全程沿黑色引导线移动。
方块从搬运起始线至堆放区过程中,方块不得与地面接触。
机器人完成任务后回到出发区停止计时。
上图为有效堆叠造型:
小学初中高中
上图为无效堆叠造型:
初中高中
4名词解释
出发区:
300mm*300mm的区域表示机器启动位置。
参赛机器在赛前可放置在出发区内任意区域,但机器人的正投影不得超出出发区黑线。
场地要素:
与比赛场地有关的一切物品。
放置区:
待搬运方块摆放的初始区域,包括两条黑色引导线以及浅蓝色正方形方块摆放标记点。
堆放区:
150mm×200mm的长方形,共有3个区域。
搬运起始线:
机器人将方块从放置区移动到堆放区的起始线,即机器人搬运的方块从此线开始不得接触场地纸。
机器人:
比赛开始前,参赛队放在场上的已通过检查的所有物品。
比赛:
每场比赛为自动程序比赛,总时长是120秒。
影响比赛:
导致一场比赛得分改变的情况。
取消比赛资格:
对违反规则的参赛队给予的犯规处罚。
在裁判长的酌定下,反复犯规和被取消比赛资格的某一参赛队可能被禁止参加所有后续场次的比赛。
5机器人
5.1机器人硬件要求
5.1.1本项比赛参赛机器人需符合轮式或履带式机器人定义,不限定机器人品牌、型号,鼓励使用自制器材。
机器人电池电压不超过9V。
5.1.2机器人只能使用一个可编程处理器,所有巡线用途传感器必须是独立封装的,不得使用集成循迹卡。
用于巡线的传感器(含电机编码器)不超过5个,其他传感器数量和种类不做限制。
电机数量(含舵机)不超5个,单个电机只允许驱动单个轮子与地面有接触。
5.1.3机器人所有零部件进场的时候必须是出厂散件状态,控制器、传感器、电机、结构件之间不得相互连接,即没有任意两个零件有连接。
5.1.4机器人在出发区的长、宽、高都必须小于300mm,离开出发区后机器人大小可以做扩展,扩展后的尺寸不做限制。
5.1.5比赛任务需机器人自主完成,不能使用遥控设备。
5.2机器人软件要求
机器人编程环境不限,参赛选手自己携带安装好编程软件的电脑,程序必须是比赛现场完成编写的。
6比赛
6.1参赛队
每支参赛队由2名学生和1名教练员组成。
每个队伍准备一台机器人,参赛队员应以积极的心态面对并自主地处理在比赛中遇到的所有问题。
6.2赛制与赛程
6.2.1比赛将按小学、初中、高中三个组别分别进行。
6.2.2比赛分两轮,每轮120秒。
最终成绩为两轮相加,取总分。
6.2.3比赛分三个阶段,机器人搭建、编程与调试阶段;机器人封存阶段;竞赛阶段。
6.2.4机器人搭建、编程与调试阶段:
总时长120分钟,参赛选手自己搭建机器人、编写程序并调试机器人。
6.2.5机器人封存阶段:
编程与调试结束后,参赛选手由裁判员协助在机器人醒目处张贴队伍编号后,上交机器人统一封存。
6.2.6竞赛阶段:
竞赛分两轮。
参赛队确认准备好后须举手示意,裁判员发出指令后,选手方可启动机器人。
在裁判员发出指令前启动机器人将受到警告或犯规处罚。
机器人一旦离开出发区,选手不能再触碰机器人。
6.2.7机器人从出发区出发后,全程沿黑色引导线移动完成方块搬运任务(各组别任务数量不同,详见3.4)。
6.2.8检录与抽签:
参赛队检录后,裁判先抽取三种颜色方块的摆放点,在不透明的盒子中逐个取出的方块,按标记点数字从小到大的顺序摆放(小学组6个方块摆放标记点为1-6或7-12,初中组9个方块摆放标记点为1-9或者4-12,高中组12个方块摆放标记点为1-12)。
然后抽取堆放区的颜色,也是从不透明盒子中逐个取出3个颜色的方块,按A、B、C的顺序确定每个堆放区的颜色。
6.3搭建、编程、调试
6.3.1搭建、编程与调试只能在调试区进行。
6.3.2参赛队员检录后方能进入准备区。
裁判员对参赛队携带的器材进行检查,所用器材必须符合组委会相关规定与要求。
队员不得携带U盘、光盘、无线路由器、手机、相机等存储和通信器材。
6.3.3整场比赛参赛队员有120分钟搭建、编程和调试的时间。
结束后,各参赛队在指定位置封存机器人,上场前不得再修改程序和硬件设备。
6.4赛前准备
6.4.1每轮比赛前,参赛队伍必须按时到达赛场。
在规定时间内未到场的参赛队伍将被视为弃权,成绩记为0分。
6.4.2每支参赛队可有2名队员进入比赛区,站立在待命区附近。
6.4.3每轮比赛开始前,机器人必须放在出发区中。
6.4.4到场的参赛队员应抓紧时间做好启动前的准备工作(例如,将机器人恢复到初始状态等)。
6.4.5完成准备工作后,队员须向裁判员举手示意。
6.5启动与比赛
6.5.1裁判员确认两个参赛队员均已准备好后,将发出“3、2、1,开始”的倒计数启动口令。
随着倒计时的开始,操作手听到开始命令的第一个字,即可触碰机器人按钮启动机器人。
6.5.2比赛开始前,所有方块均应放置在抽取的位置,参赛选手应仔细确认。
6.5.3比赛开始前,机器人长、宽、高不得超出300mm、300mm、300mm。
比赛一旦开始,机器人可以伸展,尺寸不受限制。
6.5.4在“开始”命令前启动机器人将被视为“误启动”并受到警告或犯规处罚。
6.5.5机器人一旦启动,就只能受自带的控制器中的程序控制。
禁止选手在比赛过程中故意接触机器人和场地上的物品(包括场地图),从而改变机器人运行状态或方块得分状态。
影响比赛的犯规将被取消比赛资格。
6.5.6机器人在120秒内,可尝试完成所有任务以获得更多的分数,比赛期间,已被改变位置与状态的的得分物品,不得手动恢复至初始状态。
6.5.7机器人在比赛过程中,垂直投影完全离开黑色引导线,则比赛结束,由裁判员统计已完成任务得分。
允许堆叠方块时因策略需要短时间离开黑色引导线后能自主回到引导线的情况。
6.5.8比赛采用小循环方式,每个参赛队两轮比赛连续进行,中间不得更改与下载程序。
6.6暂停
比赛中,参赛队均不得叫暂停。
6.7比赛结束
6.7.1每场比赛总时间为120秒钟。
6.7.2机器人垂直投影完全离开出发区域后,选手干预机器人自主运行,比赛结束。
6.7.3比赛任务全部完成或机器人无法再完成任务,参赛队员举手并发出“比赛结束”的口头申请,裁判停止计时,则比赛结束。
裁判员宣布本轮比赛结束后,参赛选手不得触碰机器人与得分物品。
裁判员统计本轮得分,参赛队员确认成绩无误后,均须签字。
6.7.4裁判发出“清理场地”的信号后,参赛队员才能进入比赛场地搬动自己的机器人。
裁判员和志愿者将场地得分物品恢复到启动前状态,参赛队员应立即准备下一轮比赛。
6.7.5结束两轮比赛的参赛队员应立即将机器人搬回封存区,选手回到准备区就坐。
6.8计分标准
6.8.1搬运计分:
方块完全脱离初始标记点,计5分/个。
方块完全进入正确堆放区,计20分/个;方块未完全进入正确堆放区,计10分/个。
6.8.2堆叠计分:
堆叠在上层的方块,10分/个。
同色方块在正确堆放区完成有效堆叠造型任务,30分/堆。
6.8.3完成部分或全部任务后,机器人回到出发区,任意驱动轮进入,得10分。
6.8.4比赛结束时,均以任务道具静止状态计分。
如比赛结束时,任务道具与机器人未脱离,则得分无效。
6.9犯规与取消比赛资格
6.9.1经过催促仍未准时到达比赛区的参赛队将取消其比赛资格。
6.9.2参赛队员第一次误启动将受到裁判员警告,第二次误启动将按弃权处理。
6.9.3机器人垂直投影完全脱离黑线,则比赛结束,之前得分有效。
6.9.4机器人在搬运方块从搬运起始线至堆放区过程中,如方块与地面有接触,则该方块后续得分均无效。
6.9.5如果由参赛队员或机器人造成任务模型损坏,不管有意还是无意,将警告一次。
该轮该任务不得分,即使该任务已完成。
6.9.6比赛中,参赛队员有意接触任务模型或机器人,该参赛队将被取消比赛资格。
偶然的接触可以不当作犯规,除非这种接触直接影响到比赛的最终得分。
6.9.7参赛队员不听从裁判员的指令将被取消比赛资格。
6.9.8参赛队员在未经裁判长允许的情况下,私自与教练员或家长联系,将被取消比赛资格。
7获胜名次排列规则
每个组别按总得分排名。
如果出现局部并列的排名,按如下顺序决定先后:
7.1所有场次用时总和少的队在前。
7.2所有场次中方块堆叠分高的队在前。
B类:
轮式或履带式行走机器人
竞赛记分表
市(区)参赛学校队伍编号轮次:
评分类别
评分项目
计分
数量/完成
得分
搬运1
方块完全脱离初始标记点
5分
个
搬运2
方块完全进入正确堆放区
20分
个
方块未完全进入正确堆放区
10分
个
堆叠1
堆叠在上层的方块
10分
个
堆叠2
同色方块在正确的堆放区完成
堆叠造型
30分
回出发区
完成部分或所有任务后,任意驱动轮在出发区
10分
比赛计时
总得分
裁判员签字:
参赛队员代表:
取消参赛资格原因:
 升级会员
升级会员 