精密形位误差的测试与数据处理实验报告讲解.docx
《精密形位误差的测试与数据处理实验报告讲解.docx》由会员分享,可在线阅读,更多相关《精密形位误差的测试与数据处理实验报告讲解.docx(24页珍藏版)》请在冰豆网上搜索。
精密形位误差的测试与数据处理实验报告讲解
实验一用合像水平仪测量1500500平板的平面度
一、实验目的
1.了解合像水平仪的结构和工作原理。
2.加深对平面度定义的理解。
3.掌握用水平仪测量平板平面度方法及测量数据处理。
4.掌握平面度的判定标准及数据处理方法。
二、实验内容
用合像水平仪测量平板平面度误差。
三、实验仪器及器材
合像水平仪,标准平面平板、桥板。
四、测量原理
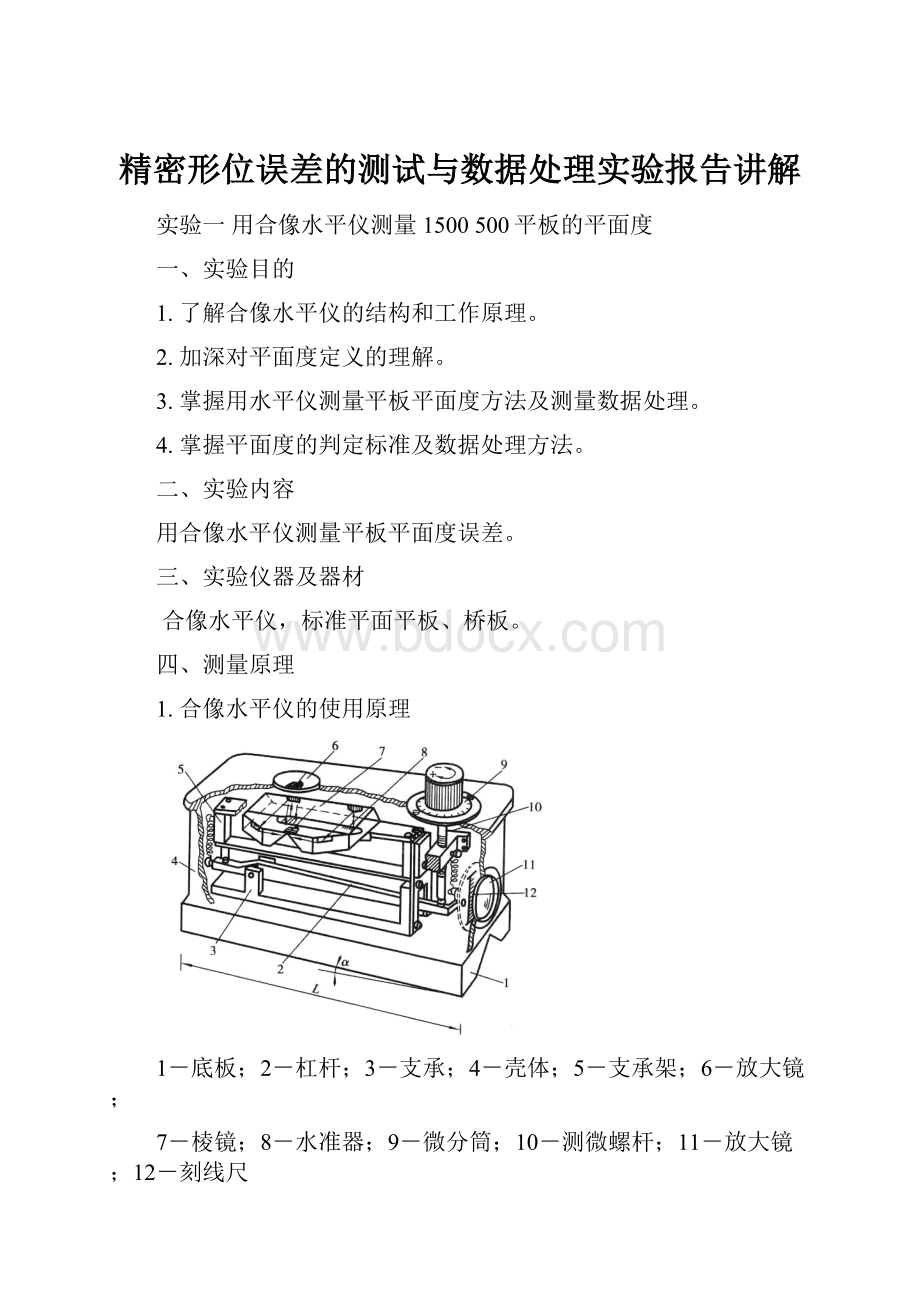
1.合像水平仪的使用原理
1-底板;2-杠杆;3-支承;4-壳体;5-支承架;6-放大镜;
7-棱镜;8-水准器;9-微分筒;10-测微螺杆;11-放大镜;12-刻线尺
图1-1合像水平仪
合像水平仪是一种精密测角仪器,用自然水平面为测量基准。
合像水平仪的结构见图1-1,它的水准器8是一个密封的玻璃管,管内注入精镏乙醚,并留有一定量的空气,以形成气泡,管的内壁在长度方向具有一定的曲率半径。
气泡在管中停住时,气泡的位置必然垂直于重力方向。
就是说,当水平仪倾斜时,气泡本身并不倾斜,而始终保持水平位置。
利用这个原理,将水平仪放在桥板上使用,便能测出实际被测直线上相距一个桥板跨距的两点间高度差,如图1-2所示。
I-桥板;Ⅱ-水平仪;Ⅲ-实际被测直线;L-桥板跨距;0,1,2,…,n-测点序号
图1-2用水平仪测量直线度误差时的示意图
在水准器玻璃管管长的中部,从气泡的边缘开始向两端对称地按弧度值(mm/m)刻有若干条等距刻线。
水平仪的分度值i用[角]秒和mm/m表示。
合像水平仪的分度值为2",该角度相当于在1m长度上,对边高0.01mm的角度,这时分度值也用0.01mm/m或0.01/1000表示。
测量时,合像水平仪水准器8中的气泡两端经棱镜7反射的两半像从放大镜6观察。
当桥板两端相对于自然水平面无高度差时,水准器8处于水平位置。
则气泡在水准器8的中央,位于棱镜7两边的对称位置上,因此从放大镜6看到的两半像相合(如图1—3(a)所示)。
如果桥板两端相对于自然水平面有高度差,则水平仪倾斜一个角度α,因此,气泡不在水准器8的中央,从放大镜6看到的两半像是错开的(如图1—3(b)所示),产生偏移量△。
(a)相合(b)错开
图1-3气泡的两半像
为了确定气泡偏移量A的数值,转动测微螺杆10使水准器8倾斜一个角度α,以使气泡返回到棱镜7两边的对称位置上。
从放大镜中观察到气泡的两半像恢复成图1-3(a)所示相合的两半像。
偏移量A先从放大镜11由刻线尺12读数,它反映测微螺杆10转动的整圈数;再从测微螺杆手轮9(微分筒)的分度盘读数(该盘每格为刻线尺一格的百分之一);它是螺杆10转动不足一圈的细分读数。
读数取值的正负由测微螺杆手轮9指明。
2.平面度误差的评定方法
平面度公差用以限制平面的形状误差。
其公差带是距离为公差值的两平行平面之间的区域。
并规定,理想形状的位置应符合最小条件,常见的平面度测量方法有用指示表测量、用光学平晶测量平面度、用水平仪测量平面度及用自准仪和反射镜测量平面度误差。
用各种不同的方法测得的平面度测值,应进行数据处理,然后按一定的评定准则处理结果。
平面度误差的评定方法有:
1.最小包容区域法,由两平行平面包容实际被测要素时,实现至少四点或三点接触。
且具有下列形式之一者,即为最小包容区域,其平面度误差值最小。
最小包容区域的判别方法有下列三种形式,分别如图1-4(a)、1-4(b)、1-4(c)所示
图1-4平面度误差的最小区域判别法
2.三角形法是以通过被测表面上相距最远且不在一条直线上的3个点建立一个基准平面,各测点对此平面的偏差中最大值与最小值的绝对值之和为平面度误差。
实测时,可以在被测表面上找到3个等高点,并且调到零。
在被测表面上按点测量,与三角形基准平面相距最远的最高和最低点间的距离为平面度误差值。
3.对角线法是通过被测表面的一条对角线作另一条对角线的平行平面,该平面即为基准平面。
偏离此平面的最大值和最小值的绝对值之和为平面度误差。
五、实验步骤
1.量出被测表面总长,确定相邻两点之间的距离(节距),按节距L调整桥板的两圆柱中心距。
2.将合象水平仪放于桥板上,然后将桥板依次放在各节距的位置。
每放一个节距后,要旋转微分筒合象,使放大镜中出现如下图b所示的情况,此时即可进行读数。
先在放大镜处读数,它是反映螺杆的旋转圈数;微分筒(标有+、-旋转方向)的读数则是螺杆10旋转一圈(100格)的细分读数;如此顺测(从首点至终点)、回测(由终点至首点)各一次。
回测时桥板不能调头。
各测点两次读数的平均值作为该点的测量数据。
必须注意,如某测点两次读数相差较大,说明测量情况不正常,应检查原因并加以消除后重测,测量位置示意图如图1-5所示。
图1-5测量位置示意图
6、实验记录
在实验过程中数据记录如表1-1所示。
其中测量桥距为:
L=25.00cm
表1-1平面度测量数据表
桥段
1-2
2-3
3-4
4-5
5-6
6-7
7-8
8-9
9-10
数值
-0.855
-0.825
1.025
1.025
1.025
0.980
0.905
0.890
0.235
桥段
10-11
11-12
12-13
13-14
14-15
15-16
16-17
17-18
18-19
数值
0.240
-1.295
-1.245
-1.255
-1.200
-1.210
-1.180
0.755
0.690
桥段
19-20
20-21
21-22
22-23
23-24
24-25
25-26
26-27
27-28
数值
0.710
0.640
0.640
0.640
0.275
0.265
-1.140
-1.210
-1.130
桥段
28-29
29-30
30-31
31-32
32-1
数值
-1.055
-1.070
-1.050
0.665
0.750
由桥距:
250mm,分度值:
0.01/1000mm计算得相对高差H=0.01/1000mm*250*数值,则各测量点间相对高差如表1-2所示。
表1-2处理后的数据记录表
桥段
1-2
2-3
3-4
4-5
5-6
6-7
7-8
8-9
9-10
H
-0.00214
-0.00206
0.002563
0.002563
0.002563
0.00245
0.002263
0.002225
0.000588
桥段
10-11
11-12
12-13
13-14
14-15
15-16
16-17
17-18
18-19
H
0.0006
-0.00324
-0.00311
-0.00314
-0.003
-0.00303
-0.00295
0.001888
0.001725
桥段
19-20
20-21
21-22
22-23
23-24
24-25
25-26
26-27
27-28
H
0.001775
0.0016
0.0016
0.0016
0.000688
0.000663
-0.00285
-0.00303
-1.130
桥段
28-29
29-30
30-31
31-32
32-1
H
-0.00264
-0.00268
-0.00263
0.001663
0.001875
七、数据处理及分析
本次试验采用最小包容区域法来计算测量平板的平面度,根据表1-2中的数据进行处理,通过matlab编程实现数据的处理计算,程序的流程图如下所示。
按照测量顺序图,各个点坐标为:
y=[02505007501000125015001500150012501000750500250001262.831025.66788.49551.32314.14676.9751262.831025.66788.49314.14676.97576.975]';
z=[0-0.00214-0.00420-0.0016370.0009260.0034080.0059380.00820.0104250.0110130.0116130.0083750.0052630.002125-0.0088-0.00390.0059380.0029880.0048760.0066010.0083760.0099760.0120250.0127130.0133750.00750.0046750.001875]';
x=[000000025050050050050050050050025079.57158.11237.17316.23395.285500500395.285316.23158.1179.59250]';单位mm
其中长为y,宽为x,起伏为z
用matlab处理数据,代码如下:
y=[02505007501000125015001500150012501000750500250001262.831025.66788.49551.32314.14676.9751262.831025.66788.49314.14676.97576.975]';
z=[0-0.00214-0.00420-0.0016370.0009260.0034080.0059380.00820.0104250.0110130.0116130.0083750.0052630.002125-0.0088-0.00390.0059380.0029880.0048760.0066010.0083760.0099760.0120250.0127130.0133750.00750.0046750.001875]';
x=[000000025050050050050050050050025079.57158.11237.17316.23395.285500500395.285316.23158.1179.59250]';
scatter3(x,y,z,'filled')
holdon
X=[ones(28,1)xy];
b=regress(z,X)
xfit=min(x):
1:
max(x);
yfit=min(y):
10:
max(y);
[XFIT,YFIT]=meshgrid(xfit,yfit);
ZFIT=b
(1)+b
(2)*XFIT+b(3)*YFIT;
mesh(XFIT,YFIT,ZFIT)
结果:
b=
-0.0025102
0.00000003
0.00000004
则平面方程为:
0.00000003x+0.0000004y+z=-0.0025102
然后计算点到平面的距离:
Fori=1:
1:
28
D=(b
(2)*x(i)+b(3)*y(i)+1*z(i)+b
(1))/sqrt(b
(2)^2+b(3)^2+1^2)
End
得出结果如下
-0.0025
-0.0032
-0.0039
0.00018
0.0041
0.008
0.012
0.0175
0.023
0.022
0.0213
0.0167
0.0121
0.0076
-0.0034
0.0117
0.0084
0.0100
0.0114
0.0128
0.0144
0.0233
0.0212
0.0195
0.0088
0.0036
0.003
可以得出Dmax=0.023mm,Dmin=-0.034mm
因此平面度:
Dmax-Dmin=0.057mm=57um
实验二正弦尺测莫氏锥度
一、实验目的
熟悉正弦尺测量锥体塞规的原理及操作方法。
二、实验内容
正弦尺测莫氏锥度。
三、实验仪器及器材
正弦尺、莫氏锥度、千分表(表架)、量块。
四、测量原理
图2-1测量示意图
根据锥体量规的标号,可从手册中查出相应的锥度
,则
可以求出。
为了使锥体塞规装到正弦尺上后,其母线平行于基面——平板,故在正弦尺下(锥体小头的圆柱下)要垫起高度
。
可由下式计算:
式中L为正弦尺二圆柱轴心线间距离。
实际上工件的锥度K可通过查表查出,从
中导出
,则量块组高度
按下式直接计算。
仪器说明:
L=100mm(200mm)B-宽面式(窄面式)
五、实验步骤
1.根据被测锥度塞规的公称锥角
及正弦尺柱中心距L,由h=Lsin
计算量块组的尺寸,并组合好量块,在正弦尺下(锥体小头的圆柱下)要垫起高度
。
本实验选用4号塞规,查表得
=2°58’31’’=2.9753°,则h=Lsin
=100*sin2.9753°=5.19mm,选用4+1.19的量块组合。
2.将圆锥塞规稳放在正弦尺的工作面上(应使圆锥塞规轴线垂直于正弦尺的圆柱轴线),选取
、
两测量点,这里
、
两点的固定距离用一个宽度
=10mm的量块保证。
3.用带架千分表测出
、
两点高度差
。
在被测圆锥塞规素线上距离
的
、
两点进行测量和读数,将指示表在第一参考点处前后推移,记下最大读数。
测量的指示表的测头应先压缩1~2mm。
重复15次,取平均值。
4.按
算出锥体误差,再根据查表所得
来判断适用性。
六、实验记录
在试验过成中记录的数据如表2-1所示。
表2-1莫式锥度测量数据表
序号
1
2
3
4
5
6
7
8
9
10
点
0.904
0.896
0.897
0.905
0.906
0.903
0.904
0.902
0.906
0.903
点
0.934
0.936
0.941
0.943
0.944
0.938
0.941
0.941
0.943
0.940
序号
11
12
13
14
15
点
0.904
0.903
0.899
0.901
0.900
点
0.938
0.944
0.936
0.937
0.936
七、数据处理及实验分析
1.在
点处千分表测得的15组数求平均值:
在
点处千分表测得的十组数求平均值:
2.
、
两点高差为:
。
所以椎体误差为
(弧度)
实验三准直管测导轨直线度
一、实验目的
1.了解应用自准平行光管测量导轨直线度的原理和方法
2.加深对导轨直线度的理解
二、实验内容
用自准平行光管测量导轨直线度
三、试验装置
自准平行光管一套、导轨一根、米尺。
四、实验原理和方法
1.直线度的准直管测量原理
直线度主要是测量圆柱体和圆锥体的素线直线度误差﹑机床和其它机器的导轨面以及工件直线导向面的直线度误差等,是长度计量技术的重要内容之一。
自准直法测量原理是用自准直光线、水平面或高精度平板的平面构成一条模拟理想直线,将被测实际直线与模拟理想直线进行比较。
图3-1测量导轨直线度的工作原理图
自准直仪的原理是,由准直光路将一个刻线的图像以平行光束(准直光)的形式投射到反射镜上,该反射镜将其光束反射回自准直仪。
如果反射镜与光轴垂直,则光束将反射回其自身。
如果反射镜倾斜一个角度,则其反射光将以角度2反射回来。
根据反射光的倾斜程度,自准直图像会以更大或更小的角度发生位移。
通过测量自准直图像在X轴及Y轴上的位移可以测得反射镜的角度变化。
导轨的直线度测量是用应用自准平行光管进行测量的。
该测量系统由光源、聚光镜组、平行光管、测微目镜和底座等五个组成部分,其工作原理如图3-1所示。
2.测量方法
图3-2测量原理图
测量中将被测导轨分成若干段,用自准直仪分别测量各段的倾斜角。
首先由光源发出的光经十字分划板(位于物镜1的焦平面上)和物镜后,以平行光射出,被放在目标位置的靶镜反射,具体的原理图如图3-2所示。
其次,调整读数旋钮使十字分划板上水平黑色刻线与反射回来在视场内成的十字线重合。
然后,从读数旋钮上即可读出该位置的角度偏离值,乘以相对水平距离即得到垂直方向的偏移值。
根据各个位置的偏离值作出被测实际直线的折线图,最后按最小条件确定被测实际直线相对于理想直线的变动量,即直线度误差值。
测量时应注意以下几点:
注意像的移动方向与反光镜偏向相反。
测量器鼓轮上的最小刻度,表示反光镜的角偏斜为1秒。
角偏斜的大小与反光镜离开望远镜的距离无关。
瞄准线的移动方向,根据使用者的需要随时可以改变。
固定的绿色十字分划线(固定不变的像)不正好处于视场中央。
五、实验记录
实验过程中测量数据如表3-1所示,最后取每点的平均数。
实验中,从导轨上10cm开始取点,到100cm结束,每组实验取10个点,共做15组实验,其中标靶长:
L=10cm
表3-1实验测量数据表
位置
10cm
20cm
30cm
40cm
50cm
60cm
70cm
80cm
90cm
100cm
组1
3’7’’
2’56’’
2’46’’
2’45’’
2’47’’
2’46
2’43’’
2’33’’
2’28’’
2’27’’
组2
3’1’’
2’56’’
2’50’’
2’54’’
2’55’’
2’55’’
2’46’’
2’39’’
2’35’’
2’31’’
组3
3’3’’
2’54’’
2’50’’
2’47’’
2’55’’
2’55’’
2’46’’
2’39’’
2’34’’
2’34’’
组4
3’4’’
2’58’’
2’50’’
2’50’’
2’55’’
2’51’’
2’45’’
2’42’’
2’36’’
2’33’’
组5
3’5’’
2’58’’
2’55’’
2’55’’
3’1’’
2’57’’
2’49’’
2’43’’
2’39’’
2’37’’
组6
3’8’’
3’1’’
2’57’’
2’55’’
3’1’’
2’55’’
2’50’’
2’43’’
2’39’’
2’38’’
组7
3’11’’
3’1’’
2’56’’
2’54’’
3’5’’
2’58’’
2’52’’
2’46’’
2’39’’
2’37’’
组8
3’11’’
3’1’’
2’57’’
2’56’’
3’3’’
3’00’’
2’53’’
2’47’’
2’38’’
2’38’’
组9
3’14’’
3’3’’
2’59’’
3’00’’
3’5’’
3’1’’
2’57’’
2’46’’
2’40’’
2’37’’
组10
3’10’’
3’2’’
2’58’’
2’59’’
3’3’’
3’00’’
2’56’’
2’47’’
2’40’’
2’38’’
平均
3’7.4’’
2’59’’
2’53.8’’
2’53.5’’
2’59’’
2’55.8’’
2’49.7’’
2’42.5’’
2’36.8’’
2’35’’
六、数据处理
在实验测量时,读出的数据是单位为分秒的数据,因此为了便于计算,将他们化为单位为度的数据如表3-2所示。
表3-2
导轨位置
10cm
20cm
30cm
40cm
50cm
倾斜角(°)
0.0521
0.0497
0.0483
0.0482
0.0497
导轨位置
60cm
70cm
80cm
90cm
100cm
倾斜角(°)
0.0488
0.0471
0.0451
0.0436
0.0431
根据
可以算出高差如表3-3所示。
表3-3
导轨位置
10cm
20cm
30cm
40cm
50cm
垂直高差
(mm)
0.09093
0.08674
0.08430
0.08412
0.08674
导轨位置
60cm
70cm
80cm
90cm
100cm
垂直高差
(mm)
0.08517
0.08221
0.07871
0.07610
0.07522
根据垂直高差用matlab编程拟合出一条最小二乘剩曲线。
源程序如下:
x0=10:
10:
100;
y0=[0.090930.086740.084300.084120.086740.085170.082210.078710.076100.07522];
a2=polyfit(x0,y0,1);
y=a2
(1).*x0+a2
(2);
a3=y0(5)-a2
(1)*50
a4=y0(3)-a2
(1)*30
y1=a2
(1).*x0+a3;
y2=a2
(1).*x0+a4;
plot(x0,y0,'p');
holdon
plot(x0,y0);plot(x0,y);plot(x0,y1);plot(x0,y2)
xlabel('导轨直线度(cm)');
ylabel('误差(mm)');
运行结果如图3-3所示,其中:
a3=0.0943,a4=0.0889,a2=[-0.00020.0914]
即拟合出直线为y=-0.0002x+0.0914
图3-3运行结果
表3-4各测量点到拟合曲线的距离
位置
10cm
20cm
30cm
40cm
50cm
到拟合直线的距离(mm)
0.0009920
-0.001566
-0.002564
-0.001192
0.003000
位置
60cm
70cm
80cm
90cm
100cm
到拟合直线的距离(mm)
0.002962
0.001534
-0.0004340
-0.001662
-0.001020
各测量点到该拟合直线的距离如表3-4所示,以最小二乘中线作为评定基线,可以看出第5点和第3点为各测点相对于基线的最大和最小偏离点,该两点相对于基线的距离即为直线度误差值。
由图和给定数据可得导轨的直线度,即为:
0.003000+0.002564=0.005564mm=5.564m。
实验四万能显微镜测工件内孔圆度
一、实验目的
熟悉用万能工具显微镜实现对工件内孔圆度的测量与测量数据处理。
二、实验内容
用万能工具显微镜测量工件内孔的圆度。
三、实验仪器及器材
万能工具显微镜、工件。
四、测量原理
万能工具显微镜(图4-1),是长度计量部门最常见的光学仪器之一。
可用于测量工件长度、角
 升级会员
升级会员 