四旋翼机制作.docx
《四旋翼机制作.docx》由会员分享,可在线阅读,更多相关《四旋翼机制作.docx(32页珍藏版)》请在冰豆网上搜索。
四旋翼机制作
四悬翼制作.pdf
文武
杨晓波
早在1907年,法国人布勒盖特·瑞切(BréguetRichet)所发明的世界第一架有人架势四旋翼飞行器“GyroplaneNo.I”就已能升上天空。
但由于构造复杂、飞行员不易操纵等原因,四旋翼飞行器的发展并非一帆风顺。
近年来,随着新材料、微机电、微小型飞行控制等技术的进步,微小型多旋翼无人飞行器逐渐成为迅速发展的重点。
与常规旋翼飞行器如传统布局的直升机等相比,多旋翼飞行器结构更为紧凑,动力利用效率高,并且四只旋翼扭力矩可相互抵消,无需专门的反扭矩旋翼。
多旋翼飞行器实现微小型化后,特别适合在近地面环境(室内、街巷和丛林)中执行监视、侦察等任务,具有广阔的军用和民用前景。
目前,AirToAir公司已开发成功多款1kg级微小型多旋翼Draganfly系列飞行器,在可靠性、适应性和多用途方面已较为成熟。
本文以该系列飞行器中的四旋翼飞行器为例,揭示该类微型无人飞行器的奥秘——
Draganfly四旋翼飞行器采用的柔性防抖挂
小巧的外观和结构
Draganfly四旋翼飞行器从外形上看相当小巧,完全可以把它放在摊开的手掌中放飞,但所谓“麻雀虽小、五脏俱全”,别看它个头小,飞行器的各个组成部分却一样不少。
总体结构整套飞行器由机体、手持式遥控装置、无线视频眼镜、无线视频基站、充电装备以及多种负载和备附件组成。
整套飞行器可装进一个不大的便携箱中,便于人员背携。
Draganfly四旋翼飞行器一侧马达臂上的LED导航灯
飞行器的核心是机体最中央的部分,外观呈盾形,其外壳由高强度碳纤维制成,保护着其内部设置的多个基本传感器,盾形外壳下沿则是机体电池的安装位置;再下方是负载区,可利用随机搭配的柔性防抖挂架搭载多种侦察器材。
当然,根据用户需要,也可定制专用负载挂架以搭载其他特制器材。
机体的起降架同样采用柔性减震的碳纤维材质,滑撬式设计,安装于盾形外壳后方1/3处,可快速拆卸。
飞行器的升力装置由四具微旋翼组成,它们呈X形布设于盾形外壳四周的马达臂上,每具旋翼分别由一副超静音无刷式马达驱动。
与传统有刷马达相比,这种马达具有较高的能量转化效率、低噪声等特点。
至于每副旋翼,则由两片碳纤维叶片组成,可从马达上快速拆卸。
转动时,互成对角线的两副旋翼旋转方向相同,而另一侧对角线上的旋翼旋转方向则与前两副相反,以此来抵消彼此产生的扭力矩。
4个马达外侧还设有不同颜色的LED闪光导航灯,具体为前左侧为红色、前右侧为绿色,后左侧为白色、后右侧为蓝色。
当飞行器在昏暗环境中飞行或飞行距离较远时,使用者可根据LED导航灯的颜色来判断飞行器的姿态和位置。
Draganfly四旋翼飞行器的便携箱
飞行器尺寸Draganfly四旋翼飞行器极其袖珍,以标准配置的四旋翼飞行器为例,含旋翼时的长、宽各为64.5cm,顶部直径为78.5cm,带起降架时高21cm;如拆除旋翼,其长、宽则分别为36cm。
起落架的安装高度约17cm,滑橇长31cm。
飞行器带电池、空载时的质量为680g,有效负荷约250g,最大起飞质量为980g。
电池飞行器所采用的电池为锂离子电池,容量为1900mA时,输出电压为14.8V,一次充电后根据负载不同可供飞行器飞行约20~30分钟,采用专用充电器可在30分钟内完成充电。
遥控装置用于控制飞行器的手持式遥控装置长22cm、宽12cm,其中部是一块显示飞行器综合状态的显示屏,左侧为操纵飞行器横滚的控制杆、右侧为操纵其俯仰的控制杆,整个面板上分布有多个按钮,顶部为两根接收/发射天线。
其他附件随整套系统的附配件还有迷你无线视频基站,该基站采用三脚架驾设,主要用于传输和记录侦察设备传回的视频和图片,它也采用锂离子电池供电。
该基站长16.5cm、宽8cm、高4.5cm,质量约680g。
在携带时,飞行器和其他所有备附件可装进一个长74cm、宽47.5cm、高28cm的便携箱内,便于人员背携,由单兵携带。
Draganfly四旋翼飞行器及其手持式遥控装置
飞行控制
与传统旋翼飞行器采用尾旋翼来克服主旋翼旋转时产生的扭矩相比,对称四旋翼结构被认为是一种最简单和最直观的稳定控制形式,但由于这种旋翼结构必须同时协调控制四个旋翼的状态参数,这对驾驶员而言是非常困难的,所以这类飞行器问世虽早,却始终未真正应用到大型直升机设计中。
但随着材料、控制技术的进步,特别是微电子技术的普及,使这一结构的微小型飞行器得以应用。
传统旋翼直升机配备有主旋翼和尾旋翼,它们是通过控制两个旋翼的参数,从而实现直升机姿态和位置的控制,而微小型四旋翼飞行器与此不同,它通过调节四个马达转速来改变旋翼转速,实现四个旋翼升力的不均匀变化,从而控制飞行器的姿态和位置。
就Draganfly四旋翼飞行器而言,其控制系统由盾形机壳下的微计算机和传感器组组成,传感器组由3个陀螺仪、3个加速计和1个气压计共同组成系统的惯性导航控制系统,这些传感器探测飞行器的水平、垂直、俯仰、航向和角速度等运动状态,并将探测到的参数输入到微计算机中,再由其计算出四个马达的转速,通过控制电源输入各个马达不同的电流来实现各马达以不同速率旋转,以此来对飞行器的飞行状态进行修正。
其可实现6种基本运动状态,具体如上图所示。
其6种基本运动状态分别是垂直运动、俯仰运动、滚转运动、偏航运动、前后运动、侧向运动。
以图中马达1、3所在X轴为前进方向,图中箭头向上表示此旋翼转速提高,箭头向下表示转速下降,以此来说明各种运动状态的实现原理。
垂直运动垂直运动相对较为容易控制,因两对旋翼转向相反,可平衡其对机身的反向扭矩,因此4个旋翼同时
提供向上升力。
当此升力大于机体质量时,便可实现垂直上升,反之则机体下降。
Draganfly四旋翼飞行器可搭载松下徕美DMC-FX580照相机
俯仰和滚转运动在图b中,旋翼1转速上升,旋翼3转速下降,旋翼2、4保持不变。
为了不因旋翼转速的改变而引起飞行器整体扭矩改变,旋翼1、3转速改变量大小应相同,同时由于旋翼1升力上升、旋翼3升力下降,产生的不平衡力矩使机身绕Y轴向一侧旋转;而当旋翼1转速下降、旋翼3转速上升时,机身则沿另一侧旋转,从而实现飞行器不同方向的俯仰运动。
在图c中,改变旋翼2、4转速,保持旋翼1、3不变,则可使机身绕X轴旋转(正向和反向),实现滚转运动。
偏航运动这种状态可借助旋翼产生的扭矩实现,只要4个旋翼的转速不完全相同,不平衡的扭矩就会引起飞行器方位角的变化。
图d中,旋翼1、3转速上升、旋翼2、4转速下降时,旋翼1、3对机身的扭矩大于另两者的扭矩,机身便在不平衡扭矩的作用下绕Z轴转动,实现偏航运动。
前后和侧向运动要使飞行器在水平面内前后、左右运动,必须在水平面内对飞行器施加一定的力。
图e中,增加旋翼3转速,相应减小旋翼1转速,同时保持其他两个旋翼转速不变,使扭矩保持平衡。
按俯仰和滚转运动中所述,飞行器首先发生一定程度的倾斜,使旋翼升力产生水平分量,从而可实现飞行器的前后运动。
图f中,由于结构对称,侧向飞行的工作原理与前后运动完全相同,只是各旋翼转速增减的情况不同。
Draganfly六旋翼飞行器
型号:
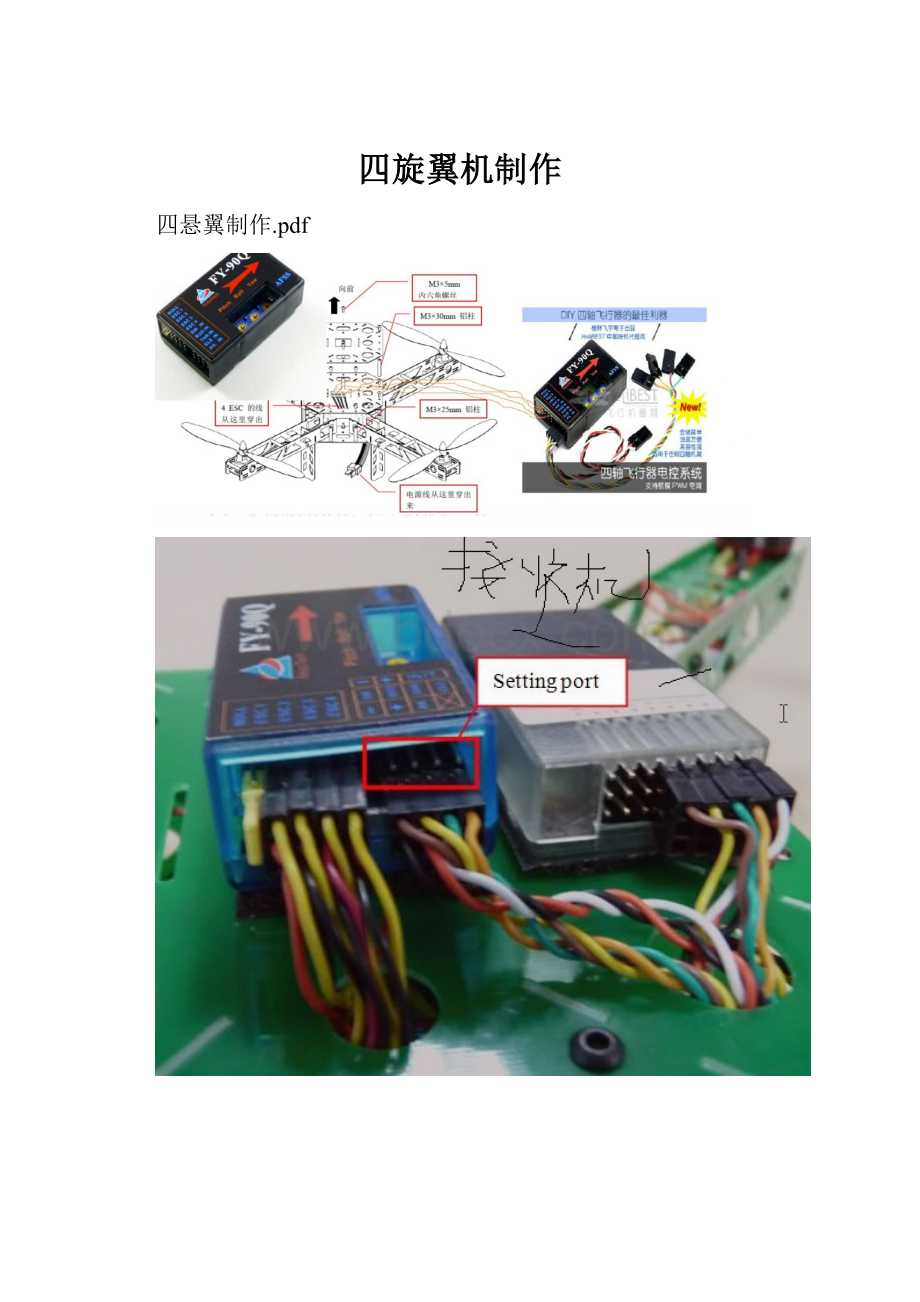
FY-90Q
名称:
通用四轴飞行器电控系统
客户群:
四轴飞行器DIY爱好者
您还需要:
四轴机架、无刷电调x4、无刷马达x4、正反桨x2、至少4通道遥控器,才能组成一个完整的四轴飞行器。
以上设备在HeliBEST.com均有销售,欢迎与本站客服联系订购!
我们将指导您顺利完成四轴飞行器的DIY操作,让您买得安心,用得舒心!
HeliBEST官方QQ技术支持群:
60609571
FY-90Q是专为目前流行的四轴飞行器市场设计的电子控制系统,它支持普通航模电调(建议使用本站推荐的高精度无刷电调,对提高稳定性有绝对帮助)、安装简单、使用方便。
它采用精密控制技术,集成3轴陀螺仪和3轴加速度计,能够自动感知飞行姿态并进行精确修正,令飞行过程始终保持平稳。
主要特点:
-支持所有四轴机架
-支持绝大多数航模级PWM无刷电调
-提供两种飞行模式(悬停模式和航线模式),可用遥控器随时切换
-支持“X”和“+”两种飞行样式
-副翼(ROLL)、升降(PITCH)、方向(YAW)感度分别可调
-体积小、重量轻、使用简单、设置方便、兼容性强
技术参数:
输入电压:
4.0至6.0V
重量:
(不包括电线)20克
工作电流:
52mAh电压(5V)
尺寸:
55×33×20mm
最大旋转速度:
=500°/秒
FY90Q支持两种格式的飞行,“十字架”和“X”
脉冲信号输出,900-2100usPPM脉冲。
配置:
1x飞宇FY-90Q四轴飞行控制器
1x专用减震器
1x减震胶垫
1x英文说明书
1x精美包装盒
四旋翼验证机的制作(边做边上图)
哥们做了一个四旋翼飞控系统,我来负责制作四旋翼验证机的硬件部分,看过一些国内高手的设计,很受启发,但是开始动手还是采取了最传统的加工工艺
看看德国的很漂亮
下载(57.88KB)
2008-3-1116:
28
副本DSC02339.JPG(41.88KB)
下载次数:
161448
2008-3-1114:
55
副本DSC02340.JPG(46.02KB)
下载次数:
158525
2008-3-1115:
53
本来要用夹箍固定,后来发现管子会转动,干脆吧,打孔
副本DSC02341.JPG(44.14KB)
下载次数:
164790
2008-3-1115:
53
加强的中间木梁
DSC02343.JPG(54.78KB)
下载次数:
308776
2008-3-1117:
17
DSC02344.JPG(41.22KB)
下载次数:
163937
2008-3-1117:
17
DSC02345.JPG(36.48KB)
下载次数:
159270
2008-3-1117:
17
DSC05237.JPG(41.51KB)
下载次数:
143978
2008-6-613:
58
20080606更新,就地取材,大家不许笑;)
DSC05388.JPG(36.1KB)
下载次数:
140673
2008-6-614:
51
我自己设计的电机座,嘿嘿。
探出的部分要加上一根防止打桨的碳杆儿
DSC05390.JPG(38.65KB)
下载次数:
140685
2008-6-614:
51
电机座安装我是这样处理的
DSC05394.JPG(29.01KB)
下载次数:
139229
2008-6-614:
51
终于看到模样了,继续焊接电调插头
20080611-5725.JPG(59.2KB)
下载次数:
138069
2008-6-1115:
28
20080611更新,开始焊接电调
20080611-5726.JPG(34.92KB)
下载次数:
143464
2008-6-1115:
28
测试用飞机要经常拆卸,所以用了香蕉头
20080611-5727.JPG(43.27KB)
下载次数:
138877
2008-6-1115:
28
20080611-5728.JPG(33.02KB)
下载次数:
141126
2008-6-1115:
28
有些像外形入侵机器人
20080611-5729.JPG(64.57KB)
下载次数:
144171
2008-6-1115:
28
设置手工飞行混控
DSC05732.JPG(33.1KB)
下载次数:
140630
2008-6-1115:
29
测试飞行用的1托4电源线
DSC05734.JPG(44.17KB)
下载次数:
144284
2008-6-1115:
29
DSC05737.JPG(34.67KB)
下载次数:
140546
2008-6-1213:
23
防撞杆装上了
 升级会员
升级会员 